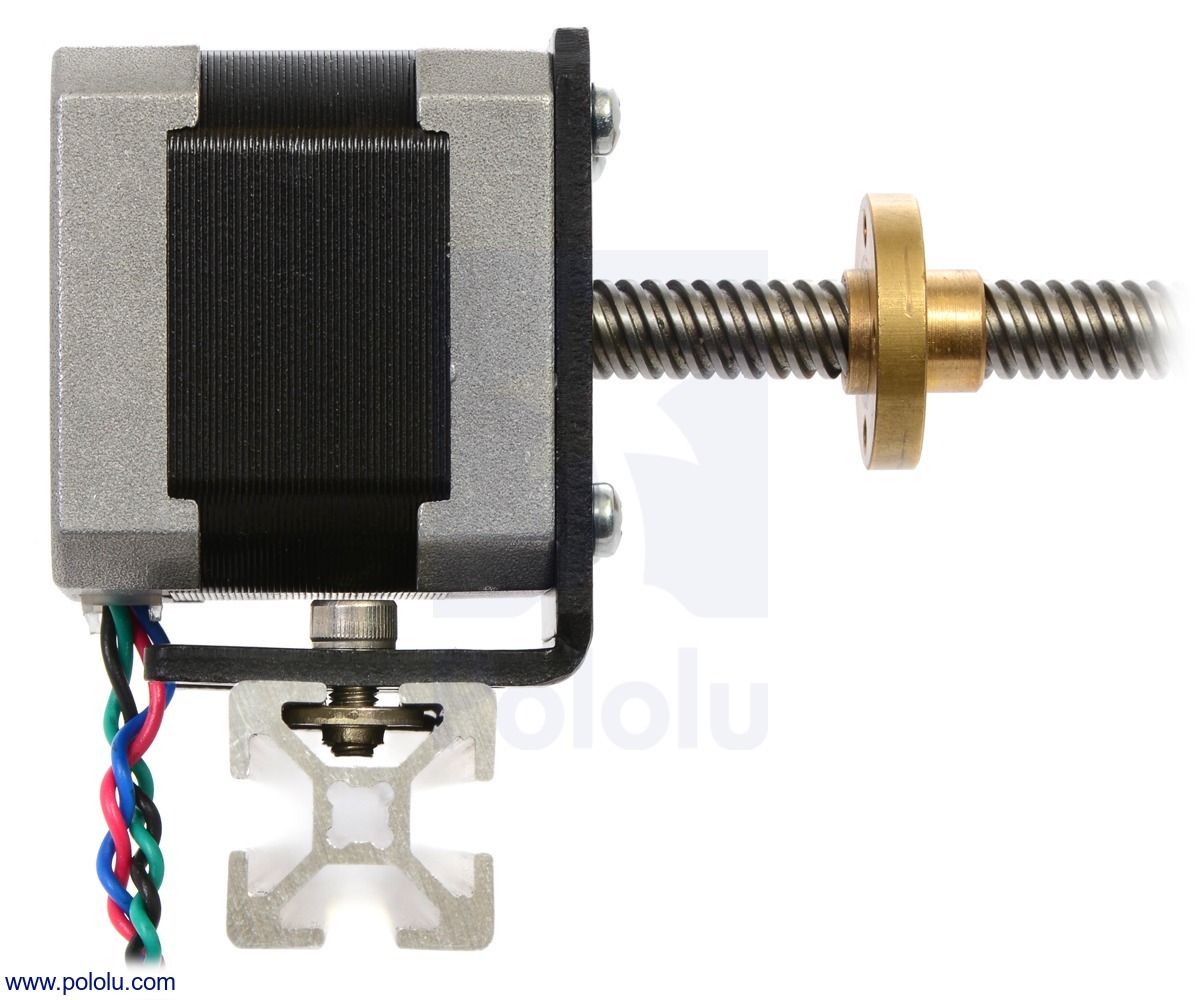
Esta unidad de posicionamiento lineal consta de nuestro motor paso a paso NEMA17 de 42 × 38 mm con un tornillo de avance incorporado en lugar del eje de salida normal, lo que facilita mover un objeto o plataforma en un movimiento lineal con la precisión de un motor paso a paso. Motores como este son especialmente populares para su uso en impresoras 3D caseras (por ejemplo, RepRap) y máquinas CNC. La varilla roscada de acero inoxidable se extiende desde la cara del motor paso a paso y, dado que está integrada en el motor, no tiene que lidiar con acopladores de eje voluminosos ni tornillos de fijación sueltos.
La tuerca móvil de aleación de cobre incluida (también conocida como tuerca de carro) cuenta con una brida de montaje con cuatro orificios roscados para tornillos M3. La tuerca se mueve 8,0 mm por revolución completa del tornillo de avance, lo que permite una resolución lineal de 0,040 mm por paso completo del motor paso a paso. Se pueden lograr pasos incluso más pequeños mediante micropasos, que es una característica de muchos controladores de motores paso a paso bipolares. Recomendamos el soporte del controlador del motor paso a paso DRV8825 o el soporte del controlador del motor paso a paso AMIS-30543 para usar con este motor paso a paso, que permiten una resolución lineal de 1,25 µm por 1/32 micropaso. Sin embargo, tenga en cuenta que la tuerca no tiene resorte, por lo que los cambios de dirección provocarán una pérdida de precisión de posicionamiento debido al juego. También se pueden adquirir tuercas viajeras adicionales por separado.
La velocidad lineal máxima alcanzable depende en gran medida de los detalles del sistema, incluida la carga y la tensión de alimentación del motor. En condiciones ideales (por ejemplo, con un aumento gradual de la velocidad de paso, un voltaje de suministro alto y sin carga), pudimos alcanzar velocidades cercanas a los 30 cm/s (12 pulgadas/s) con la versión de tornillo de avance de 28 cm.
El motor paso a paso tiene un ángulo de paso de 1,8° (200 pasos/revolución) y cada fase consume 1,7 A a 2,8 V, lo que permite un par de retención de 3,7 kg-cm (51 oz-in). El motor tiene cuatro cables codificados por colores terminados con un conector JST XHP-4 con un espaciado de 0,1″: el negro y el verde se conectan a una bobina; el rojo y el azul se conectan a la otra. Puede controlarse mediante un par de puentes en H adecuados ( uno para cada bobina), pero recomendamos utilizar un controlador de motor paso a paso bipolar.
Especificaciones
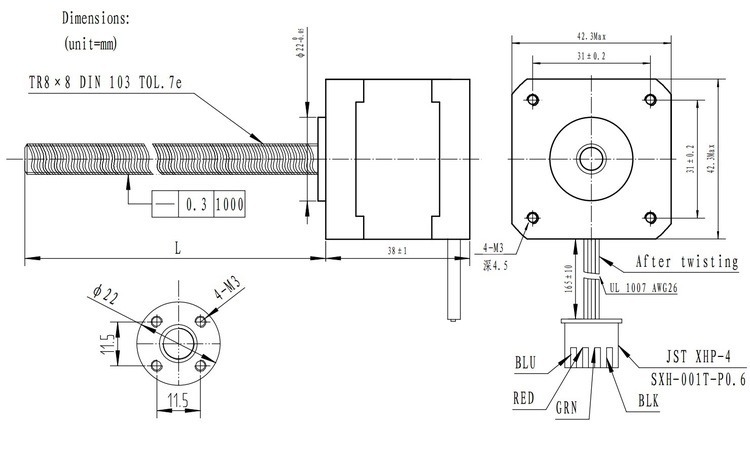
- Tamaño: 42,3 mm cuadrados × 38 mm, sin incluir el eje (NEMA 17)
- Husillo: Tr 8 × 8(P2)
- Pasos por revolución: 200
- Tamaño de paso lineal: 40 µm (1,6 mil) por paso completo
- Clasificación actual: 1,68 A por bobina
- Clasificación de voltaje: 2,8 V
- Resistencia: 1,65 Ω por bobina
- Par de sujeción: 3,7 kg-cm (51 oz-in)
- Inductancia: 3,2 mH por bobina
- Longitud del cable: 16 cm (6,5 ″)
- Eje de salida soportado por dos baleros.
Más especificaciones están disponibles en la hoja de datos (63k pdf). Tenga en cuenta que, si bien la hoja de datos es para el motor paso a paso con tornillo de avance de 28 cm, la única diferencia entre las tres versiones es la longitud del tornillo de avance.
Aplicaciones de motores a pasos
Los motores paso a paso se utilizan generalmente en una variedad de aplicaciones donde es deseable un control de posición preciso y el costo o la complejidad de un sistema de control de retroalimentación no se justifica. A continuación se muestran algunas aplicaciones en las que se encuentran a menudo motores paso a paso:
- Impresoras
- maquinas cnc
- Impresoras 3D/máquinas de creación de prototipos (por ejemplo, RepRap)
- cortadores láser
- Máquinas de recoger y colocar
- Actuadores lineales
- Unidades de disco duro
Nota: Este motor paso a paso maneja el número de pieza SY42STH38-1684A de SOYO.