$920.00 El precio original era: $920.00.$499.00El precio actual es: $499.00. MXN (IVA Incluido)
Sin existencias
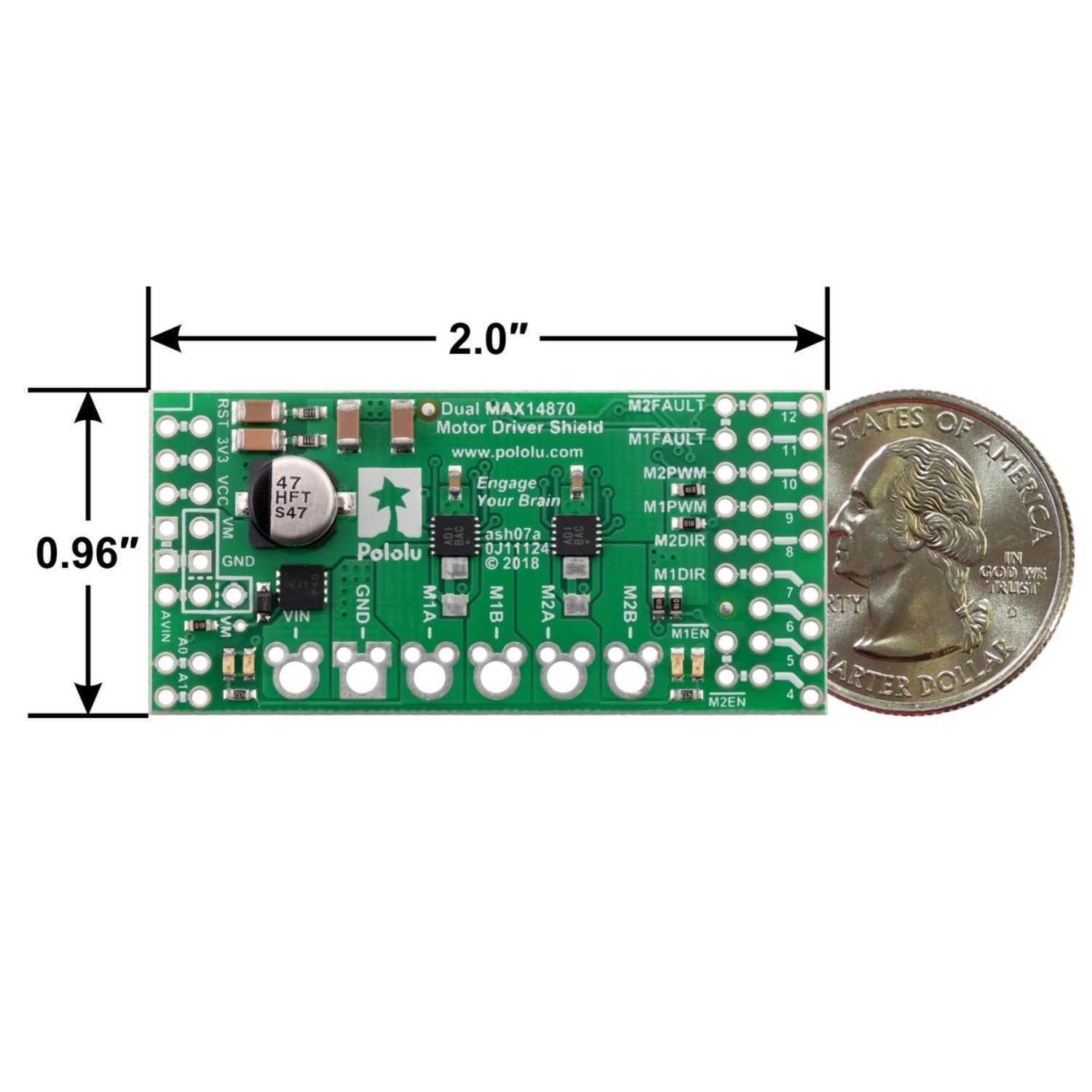
Este pequeño shield es una manera fácil y económica de controlar dos pequeños motores DC cepillados con una placa Arduino (original o compatible). Sus dos controladores de motor MAX14870 integrados le permiten operar desde 4.5 V a 36 V, lo que lo hace ideal para motores y aplicaciones de alto voltaje, y el blindaje maneja 1.7 A continuo (pico de 2.5 A) por motor. El blindaje se puede configurar opcionalmente para alimentar el Arduino desde la misma fuente de alimentación que el controlador del motor, y las asignaciones de pin Arduino se pueden personalizar (cortando trazas) si los valores predeterminados no son convenientes.
Localización: E2
| Fabricante | Pololu |
|---|
Sin existencias
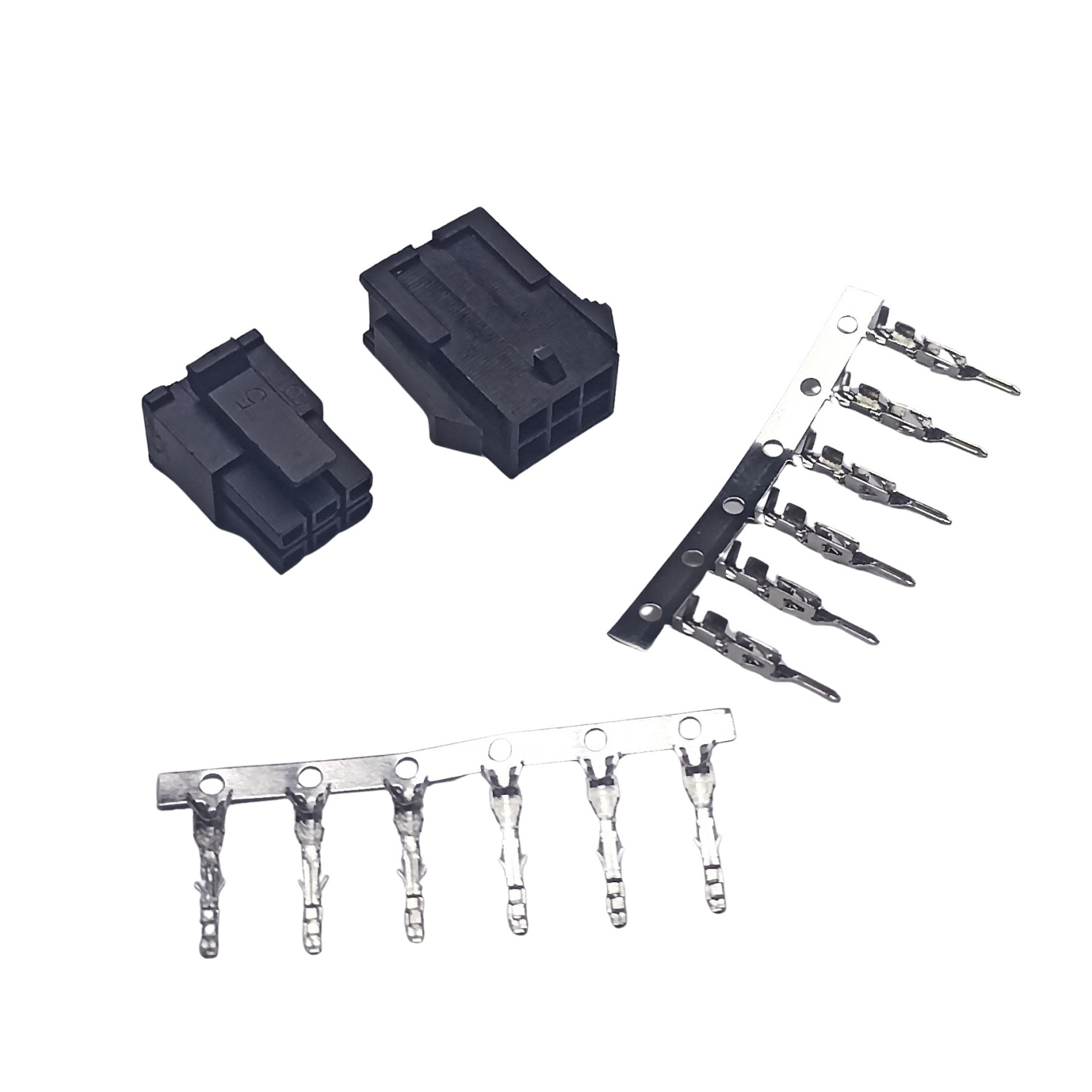
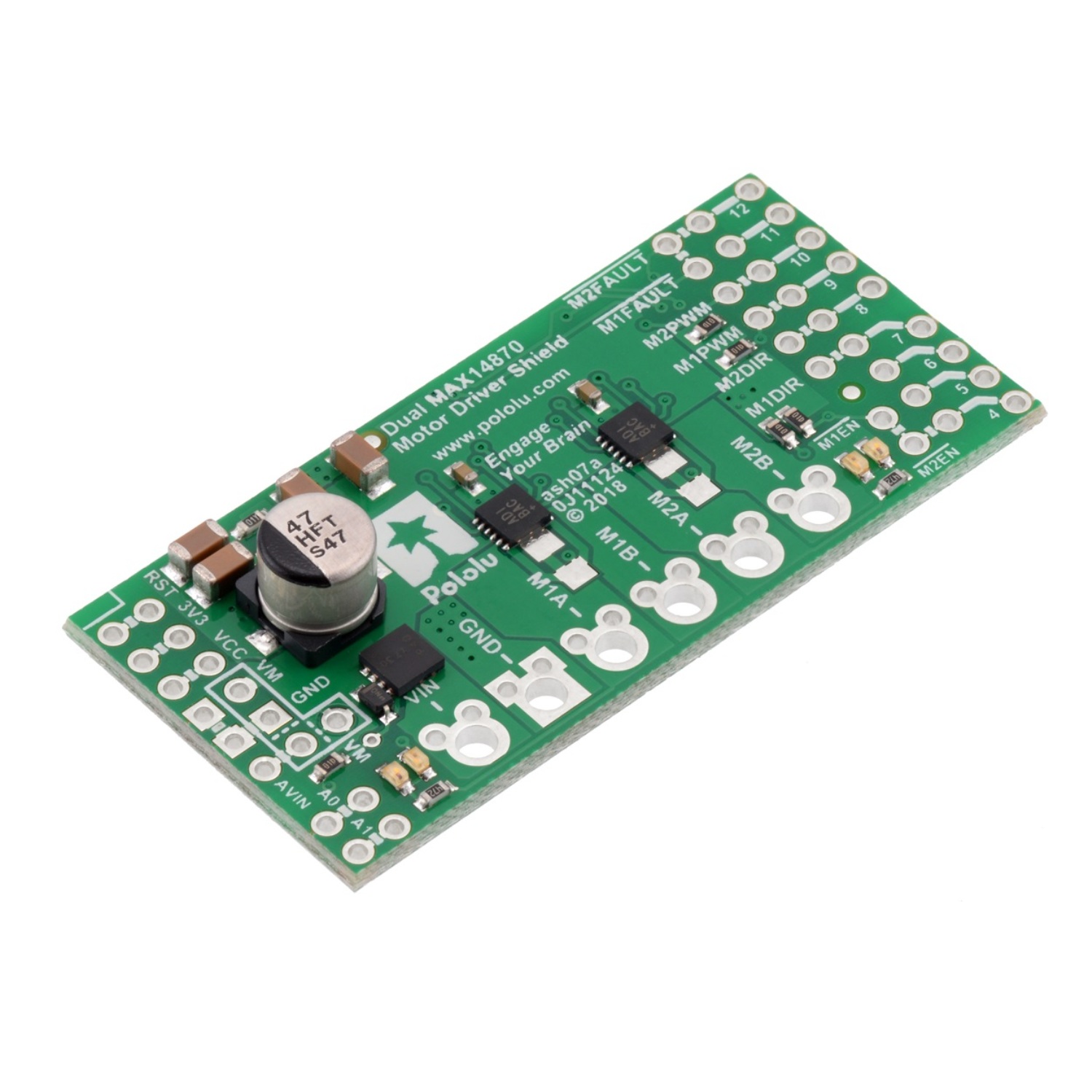
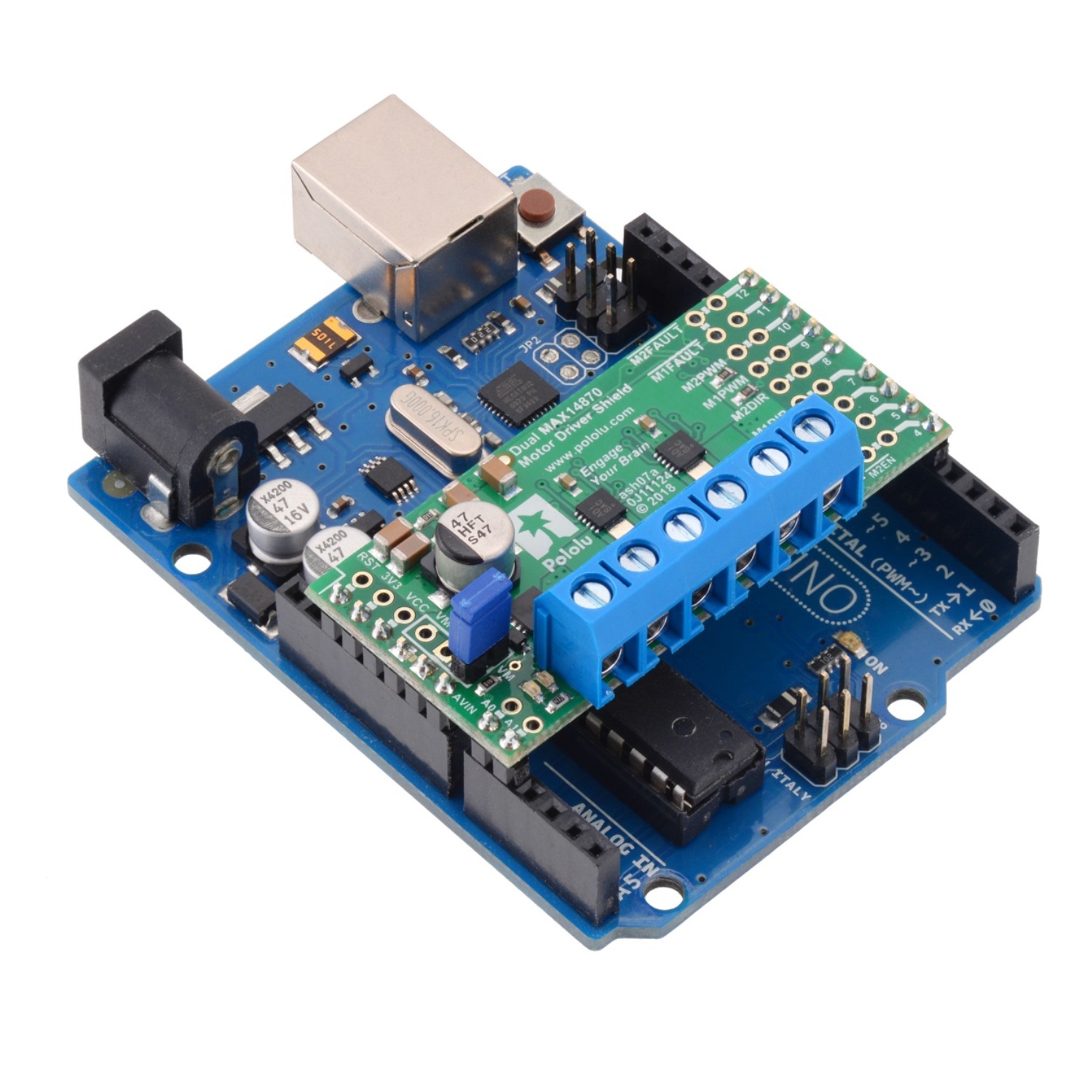
Este Shield de motor y su biblioteca Arduino correspondiente facilitan el control de un par de motores DC bidireccionales cepillados con una placa Arduino (original o compatible), como la A-Star 32U4 Prime. La placa cuenta con un par de circuitos integrados de controlador de motor Puente H MAX-8708 de Maxim, que le permite operar desde 4.5 V a 36 V y lo hace adecuado para motores de alta tensión como los motorreductores 12V 20D. El shield puede entregar 1.7 A continuas por canal y tolerar corrientes máximas de hasta 2.5 A por canal durante unos segundos. Estos shields están completamente poblados con sus componentes SMD, incluidos los controladores MAX14870 y un FET para la protección de inversión de batería; los pines del cabezal para la conexión con un Arduino y los bloques de terminales para conectar motores y alimentación están incluidos, pero no están soldados (consulte la sección Conjunto con la sección de hardware incluida a continuación).
El shield usa los pines digitales 4, 7, 8, 9, 10 y 12 para sus líneas de control, aunque las asignaciones de pines de control se pueden personalizar si los valores predeterminados no son convenientes. Debe ser compatible con cualquier placa que tenga una disposición estándar de pines Arduino y la capacidad de generar señales PWM en los pines 9 y 10. Las placas de control compatibles incluyen:
Este shield está destinado a proporcionar una opción básica de controlador de motor de bajo costo para Arduino, por lo que es mucho más pequeño que los shield Arduino típicos y no incluye los cabezales apilables que se pueden pasar. Para controladores de mayor potencia con más opciones de configuración, vea los shield de controladores de motor de alta potencia MC33926, VNH5019 y Dual G2 más grandes.
Para una alternativa de bajo voltaje a este shield, considere el controlador de motor dual DRV8835. También tenemos un kit de controlador de motor MAX14870 similar para la Raspberry Pi, así como una portadora MAX14870 individual más pequeña y de menor costo para aquellos con restricciones de espacio más estrictas o que solo desean controlar un motor.
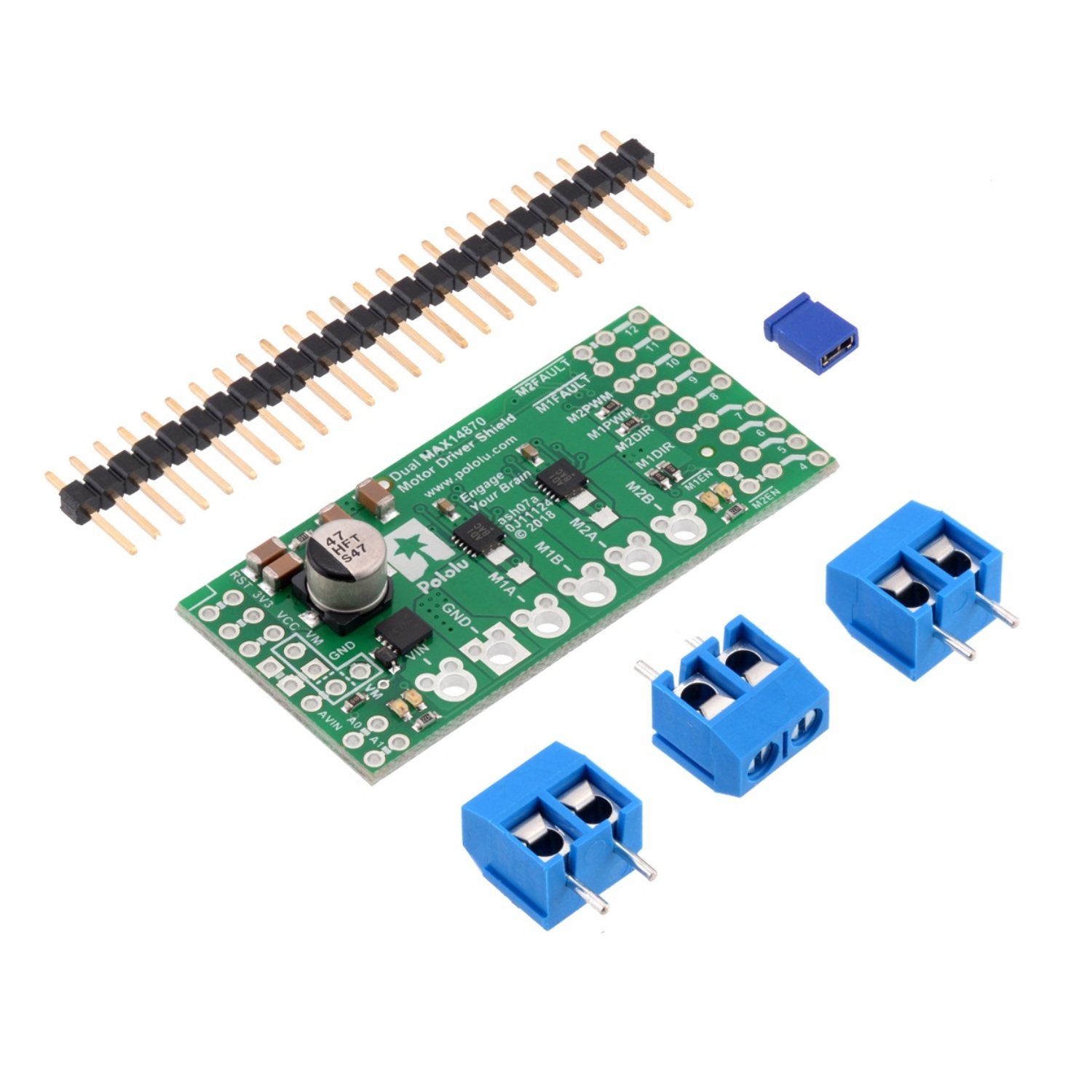
Antes de que el shield se pueda conectar en su Arduino, los pines de los cabezales deben montarse en la parte inferior de la placa (el lado sin ningún componente o texto) soldando en los orificios correspondientes. El shield se envía con una tira de cabezales macho de separación recta de 0.1″ que se puede dividir en piezas más pequeñas y usar para este propósito. La conexión a tierra es la única conexión necesaria en el lado izquierdo de la placa (aunque el VIN también debe estar soldado si pretendes encender el Arduino desde el shield). A lo largo del lado derecho de la placa, los pines digitales 4, 7, 8, 9, 10 y 12 se utilizan por defecto. Los pines del conector macho deben soldarse al menos a estas ubicaciones para que el shield realice las conexiones apropiadas al Arduino. Una vez que los pines del conector están soldados, una manera fácil de asegurarse de que está conectando el shield correctamente en el Arduino es alinear el espacio entre los pines 7 y 8 en el shield con el espacio entre los pines 7 y 8 en los cabezales hembra de Arduino.
Cuando el voltaje de entrada para los motores es apropiado para la placa Arduino, se puede proporcionar potencia de protección inversa al pin VIN de Arduino a través del shield. Para esta configuración, suelde dos clavijas de cabezal macho a la ubicación del puente «VM = AVIN» e instale el bloque de cortocircuito azul incluido en ellas (como se muestra en la imagen ensamblada anteriormente). Estos pines deben apuntar hacia arriba, lejos del Arduino.
Advertencia: El shield MAX14870 funciona con voltajes muy superiores a los que pueden tolerar las placas Arduino, por lo que es muy importante que solo use el puente «AVIN = VM» en situaciones donde el voltaje de suministro del motor también se encuentre dentro de los límites operativos de su Arduino. De lo contrario, su Arduino podría dañarse permanentemente.
Si la tensión de alimentación del motor es superior a la que puede soportar la placa Arduino, un regulador de voltaje, como nuestro regulador de voltaje step-down D24V5F9 500mA (no incluido), se puede utilizar opcionalmente para proporcionar un voltaje adecuado al pin VIN del Arduino. Para esta configuración, suelde el regulador en los pines VM, GND y AVIN que se muestran en la serigrafía del shield. Tenga cuidado de orientar el regulador para que su pin de entrada se alinee con VM y su pin de salida se alinee con AVIN. Para una configuración más modular, un conector hembra de tres pines puede soldarse al shield y usarse como un zócalo para un regulador.
El conector de alimentación del Arduino debe permanecer desconectado en todo momento si se suministra energía al pin AVIN a través del shield.
Advertencia: Al alimentar el Arduino desde el shield del motor, nunca debe conectar una fuente de alimentación diferente al pin VIN del Arduino o enchufar un suministro de energía al conector de alimentación del Arduino, ya que eso creará un cortocircuito entre el suministro de energía del shield y el del Arduino. La fuente de alimentación podría dañar permanentemente el Arduino y el shield de motor.
Se incluyen tres bloques de terminales de 2 pines de 5 mm para facilitar las conexiones de motor y de alimentación al shield una vez que se han deslizado y soldado a los seis orificios grandes. Alternativamente, puede soldar pines de cabezal macho de 0.1″ a los orificios más pequeños sobre los orificios del bloque de terminales, o puede simplemente soldar los cables directamente al shield para instalaciones más compactas (y permanentes).
Se pueden usar pines de cabezal adicionales y bloques de cortocircuito más allá de lo que se incluye para realizar algunas de las modificaciones opcionales más avanzadas del shield, como reasignar los pines de control.
NOTA: no incluye Arduino.
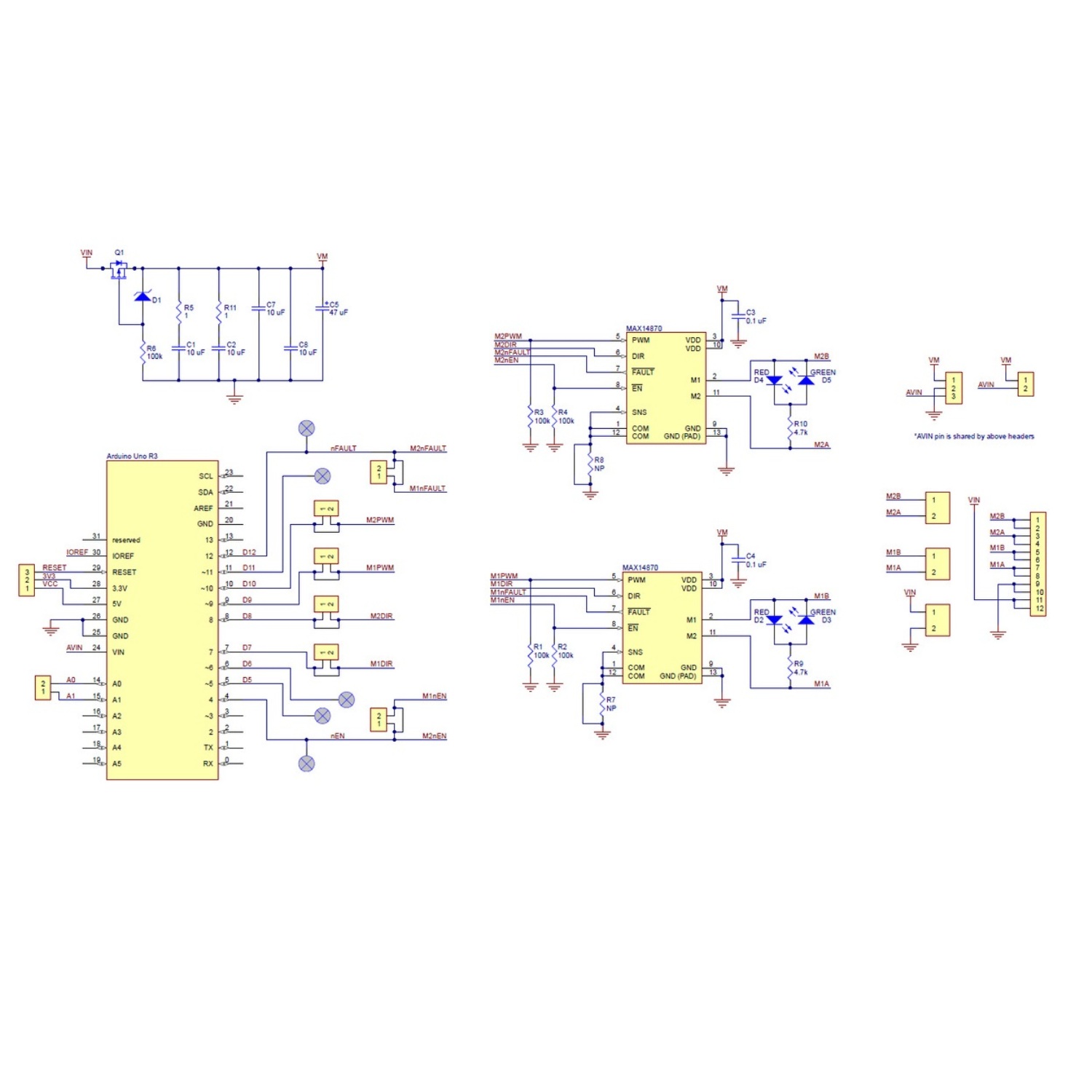
El shield se conecta a los pines digitales Arduino 4 – 12 en un lado y A1 a RST en el otro. La esquina superior izquierda del shield bloquea parcialmente el pin IOREF del Arduino, pero esta región de la placa (marcada con una caja de serigrafía blanca) se puede quitar si es necesario para permitir el acceso. El shield también bloquea los pines digitales Arduino 5, 6 y 11, pero estos pines no se utilizan por defecto y se proporcionan puntos de acceso alternativos a través de los agujeros vecinos.
Esta tabla muestra cómo los pines GPIO de Arduino se utilizan para interactuar con los controladores de motor:
| Pines digitales Arduino | Pines del Controlador de Motor | Descripción |
|---|---|---|
| 4 | EN | Entrada de habilitación invertida: el shield baja este pin por defecto, habilitando los controladores. Controlar este pin alto coloca ambos circuitos integrados del controlador del motor en un modo de reposo de baja corriente y desactiva las salidas del motor (configurándolas en alta impedancia). |
| 7 | Motor 1 DIR | Entrada de dirección del motor: cuando DIR es bajo, la corriente del motor fluye desde la salida «A» a la salida «B»; cuando DIR es alto, la corriente fluye de «B» a «A». |
| 8 | Motor 2 DIR | |
| 9 | Motor 1 PWM | Entrada de velocidad del motor: Una señal PWM (modulación de ancho de pulso) en este pin corresponde a una salida PWM en las salidas del motor del controlador correspondiente. Cuando este pin es bajo, el motor frena poco. Cuando es alto, el motor está encendido. La frecuencia máxima permitida de PWM es de 50 kHz. Una resistencia de pull-down de 100 kΩ en el shhield hace que este pin sea por defecto bajo. |
| 10 | Motor 2 PWM | |
| 12 | FAULT | Salida de Fault: el pull-up interno en el pin Arduino conectado a la entrada FAULT debe estar habilitado para que cuando los controladores funcionen normalmente tire alto. En el caso de una condición de sobrecorriente o sobretemperatura, el IC del controlador experimentará una baja desde FAULT. |
En el estado predeterminado del shield, el controlador del motor y Arduino se alimentan por separado, aunque comparten un terreno común. Cuando se utiliza de esta manera, el Arduino debe ser alimentado a través de USB, su toma de corriente, o su pin VIN, y el shield debe ser suministrado con 4.5 V a 36 V a través de sus entradas VIN y GND. Intentar alimentar el shield del Arduino no se recomienda ya que esto podría ocasionar que grandes corrientes fluyan a través de pequeños rastros. Sin embargo, es posible alimentar el Arduino desde el shield directamente con la fuente de alimentación del motor o mediante un regulador agregado. Consulte el Montaje con hardware incluido más arriba para obtener más información sobre la alimentación del Arduino desde el shield, incluidas algunas advertencias importantes.
El MAX14870 ofrece una interfaz simple de control DIR / PWM de dos pines, donde el pin DIR determina la dirección del motor y el pin PWM puede suministrarse con una señal PWM para controlar la velocidad del motor. La entrada de control PWM se baja en la pantalla a través de una resistencia desplegable de 100 kΩ. Cuando el pin PWM está bajo, las salidas del motor están cortocircuitadas a tierra, lo que resulta en el frenado dinámico de un motor conectado.
El pin EN del shield se puede impulsar para desconectar las salidas del motor para ambos canales del motor, lo que es útil si desea dejar que los motores se desvíen. El pin EN tira bajo a través de una resistencia desplegable de 100 kΩ en el shield para que ambos canales del motor estén activados por defecto. Para obtener un control individual de las líneas de habilitación para ambos controladores, se puede cortar el trazado entre los orificios pasantes M1EN y M2EN. Esto dejará M2EN conectado al pin 4 digital de Arduino. Se puede usar un puente a través del pin M1EN y el orificio pasante vecino para conectarlo al pin digital 5.
La siguiente tabla de verdad simplificada muestra cómo funciona el controlador:
| Entradas | Salidas | ||||
|---|---|---|---|---|---|
| EN | DIR | PWM | MxA | MxB | Modo Operativo |
| 0 | 0 | PWM | PWM (H/L) | L | Adelante/Freno en velocidad PWM % |
| 0 | 1 | PWM | L | PWM (H/L) | Reversa/Freno en velocidad PWM % |
| 0 | X | 0 | L | L | Freno bajo (salidas en cortocircuito a tierra) |
| 1 | X | X | Z | Z | Costa (da Salida) |
El shield MAX14780 tiene un pin de faul que combina las salidas de fault de los dos controladores integrados, M1FAULT y M2FAULT. Es una salida de fuga activa y baja de drenaje abierto que baja durante una condición de sobrecorriente o sobretemperatura en cualquiera de los canales del motor. Para obtener salidas de falla individuales, se puede cortar el trazado entre los agujeros M1FAULT y M2FAULT. Esto dejará a M2FAULT conectado al pin 12 digital de Arduino. Se puede usar un puente en el pin M1FAULT y el orificio vecino para conectarlo al pin digital 11.
El MAX14870 IC presenta una entrada SNS que se puede utilizar para la limitación de corriente automática opcional. De manera predeterminada, esta entrada está conectada a tierra para ambos controladores en esta placa, lo que evita la función de regulación actual. Para habilitar la limitación de corriente, primero debe cortar las huellas entre cada par de pads de resistencia 1206 despobladas cerca de los chips del controlador.
Luego, deberá agregar su propia resistencia de montaje en superficie 1206 a estos pads.
Cada controlador intenta mantener la tensión en el pin SNS por encima de 100 mV, así que, por ejemplo, una resistencia de 100 mΩ limita la corriente a 1 A y una resistencia de 200 mΩ la limita a 0.5 A. Para obtener más información sobre la limitación de corriente, consulte la Hoja de datos MAX14870 (492k pdf).
La hoja de datos MAX14870 recomienda una corriente continua máxima de 2.5 A. Sin embargo, el chip por sí solo generalmente se sobrecalentará a bajas corrientes. En pruebas, una corriente continua de 1.7 A por canal fue sostenible por muchos minutos sin provocar un apagado térmico.
La corriente real que puede entregar dependerá de qué tan bien pueda mantener fresco el controlador del motor. La placa de circuito impreso del shield está diseñada para ayudar con esto extrayendo calor del chip del controlador del motor. PWMing introducirá calefacción adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para causar quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.