Este potenciómetro lineal sensible a la fuerza (FSLP) de Interlink Electronics es un componente pasivo con resistencias internas que cambian de forma independiente en respuesta a la ubicación y magnitud de la fuerza aplicada. Esto permite que un microcontrolador con un convertidor analógico-digital (ADC), como un Arduino o un A-Star, determine fácilmente dónde y con qué fuerza se presiona la tira, lo que posibilita interfaces de usuario táctiles avanzadas (como la navegación por menús) o sensores táctiles sofisticados. El FSLP es, en esencia, una resistencia sensible a la fuerza (FSR) que también puede detectar la posición simultáneamente. El vídeo anterior muestra un proyecto de ejemplo con una tira FSLP similar de 4 pulgadas para controlar una tira de LED: la posición determina el número de LED encendidos y la presión determina el color del LED. Esta tira FSLP más corta de 1,4 pulgadas podría sustituir fácilmente a la del vídeo. El código Arduino utilizado en el ejemplo está disponible en GitHub e incluye funciones para leer la presión y la posición que pueden ser útiles para empezar a usar este sensor. Encontrará más información sobre la demostración en nuestra entrada del blog sobre el FSLP.
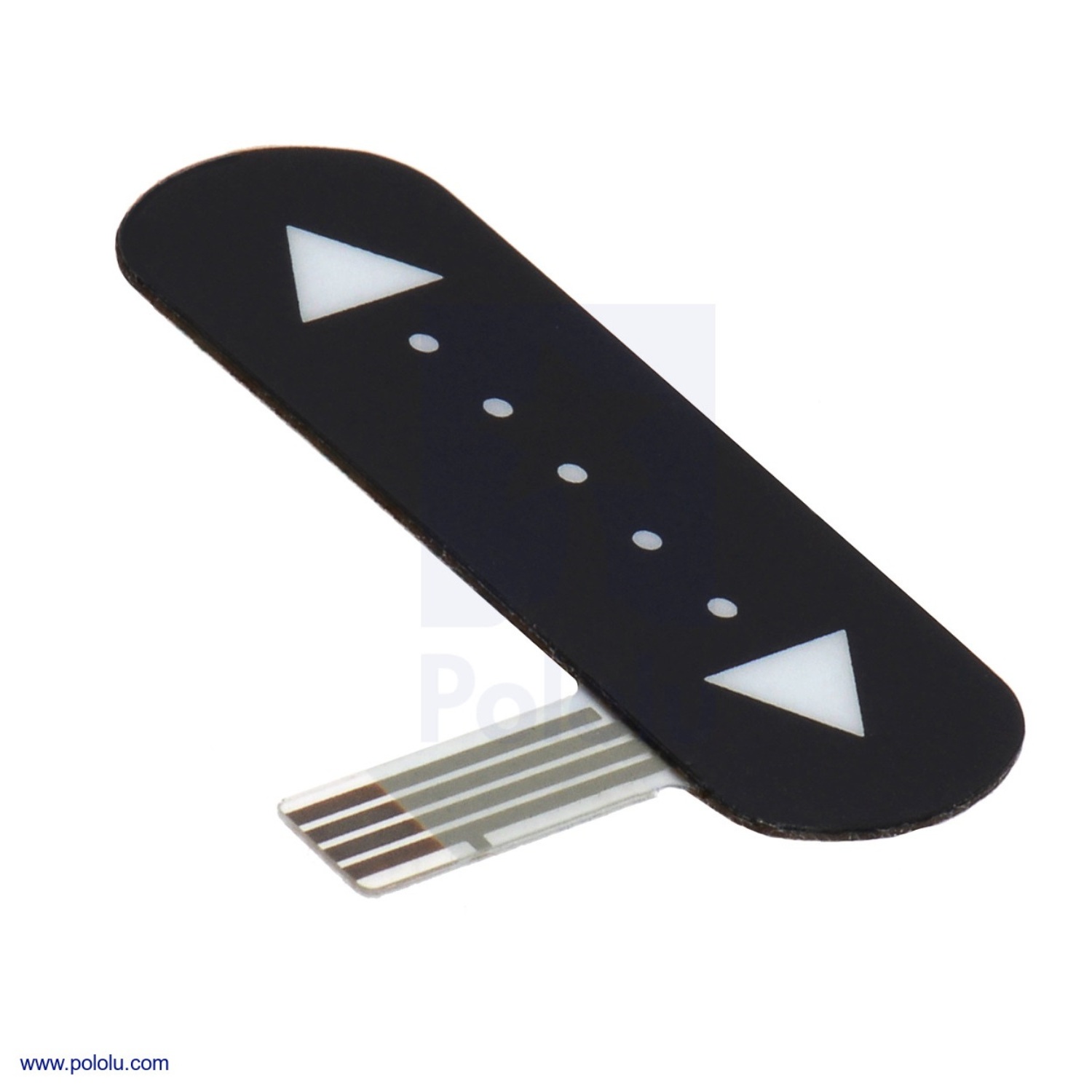
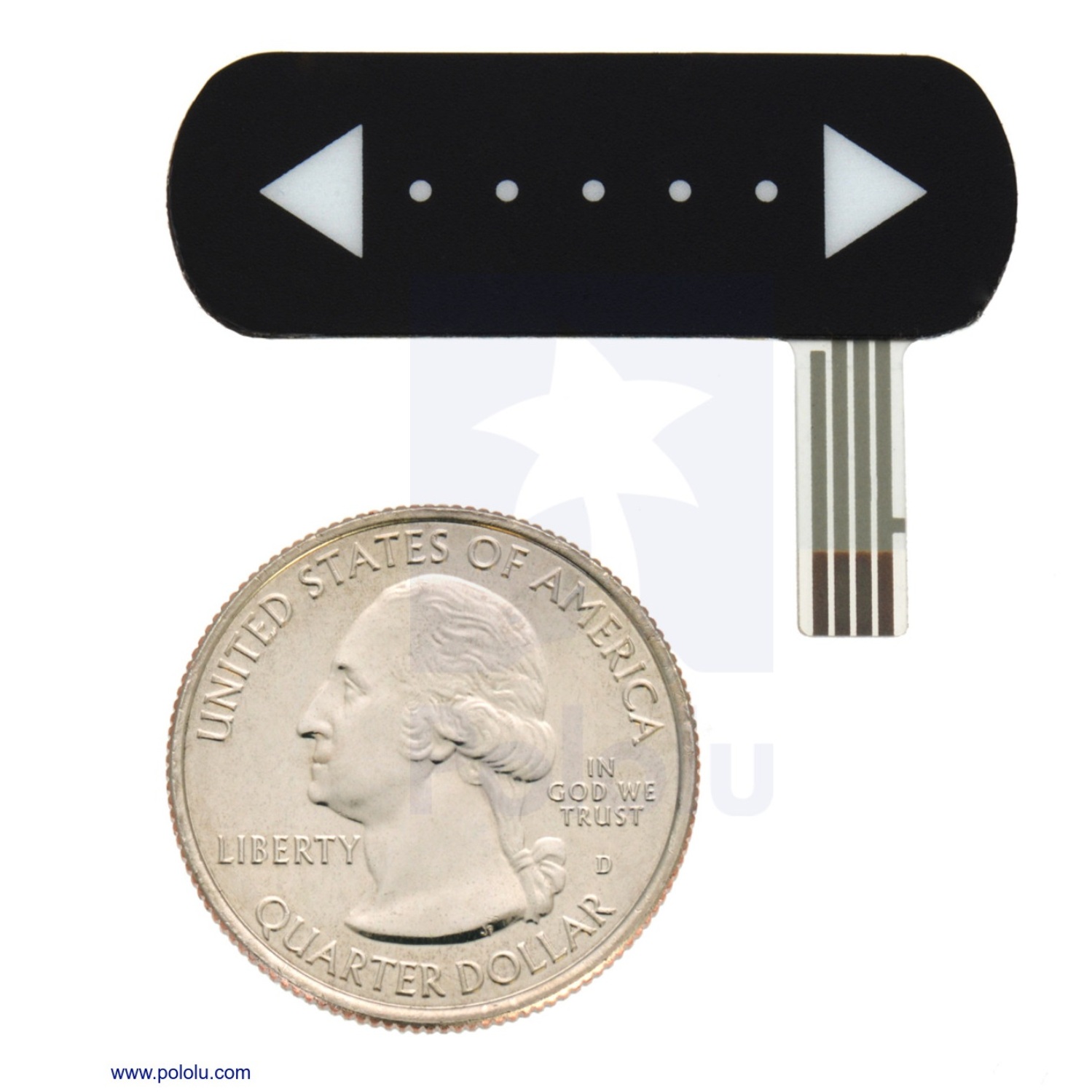
La tira de 1,5″ × 0,53″ es ligera (0,5 g) y extremadamente delgada (0,025″), con un área de detección activa de 1,4″ × 0,39″ y un extremo flexible de 0,55″ × 0,2″ para acceder a sus tres terminales (el cuarto terminal no se utiliza). No se comprime de forma apreciable al aplicar presión y, aunque es flexible, está diseñada para usarse sobre superficies lisas y planas, ya que doblarla puede afectar negativamente su rendimiento. El sensor FSLP cuenta con un adhesivo enmascarado en la parte posterior para facilitar su montaje.
Cabe destacar que este sensor FSLP no es una celda de carga ni un extensómetro, y no es adecuado para mediciones precisas de fuerza o presión. Si bien puede utilizarse para mediciones dinámicas de alta resolución, generalmente solo se obtienen lecturas de fuerza cualitativas.
Uso del sensor
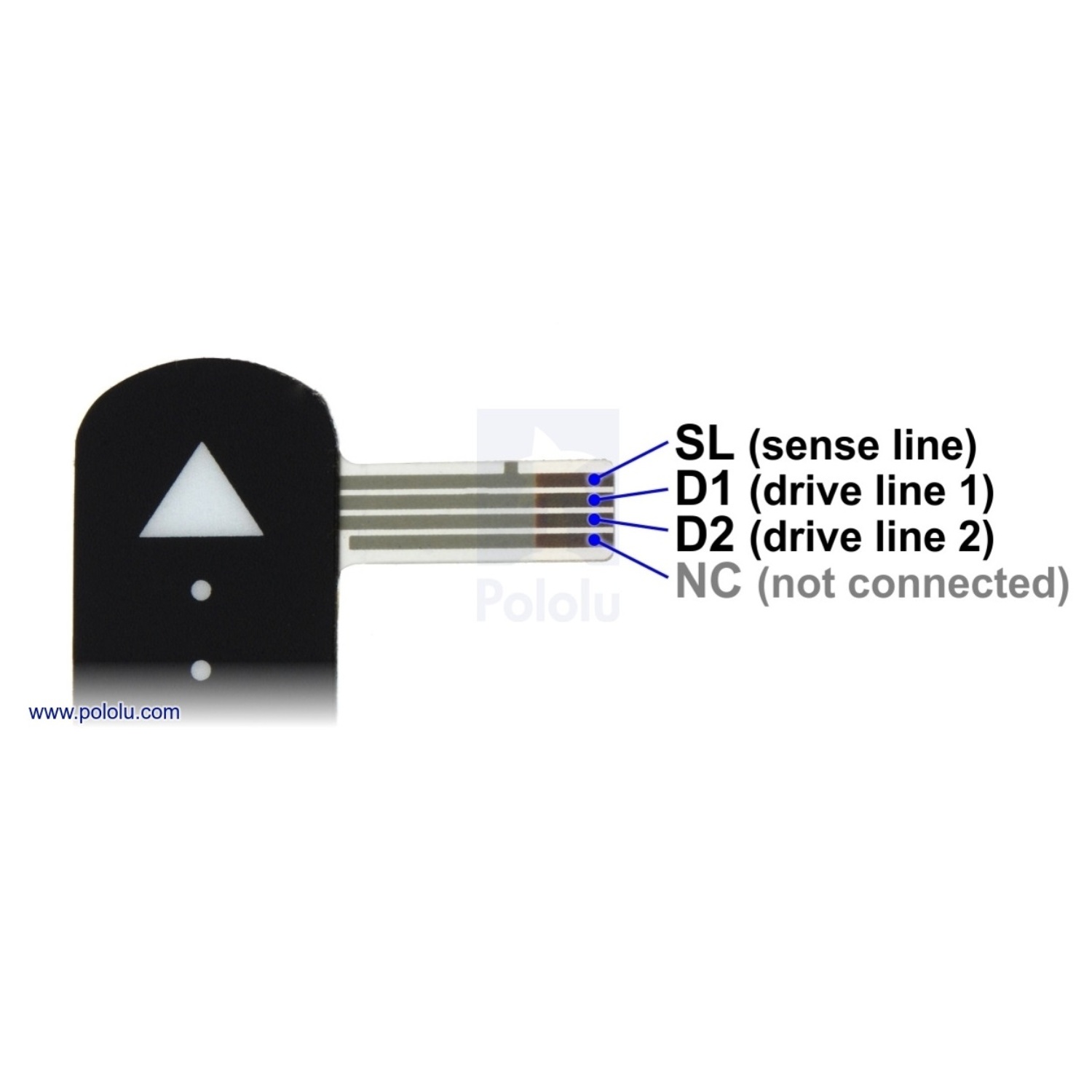
El FSLP es un dispositivo de tres terminales (el cuarto terminal del extremo del sensor no se utiliza). Al aplicar presión, su circuito interno equivale a tres resistencias. Para medir la magnitud de la presión, se requiere añadir una resistencia externa al circuito, por lo que se necesitan cuatro líneas del microcontrolador, dos de las cuales deben ser capaces de leer voltajes analógicos. En la guía de integración del FSLP (PDF de 513 kB) se encuentra información detallada sobre este sensor, incluyendo su funcionamiento, dimensiones y procedimientos de medición. El resto de esta sección resume brevemente algunos de los puntos clave de los procedimientos de medición descritos en la guía de integración.
Medición de presión
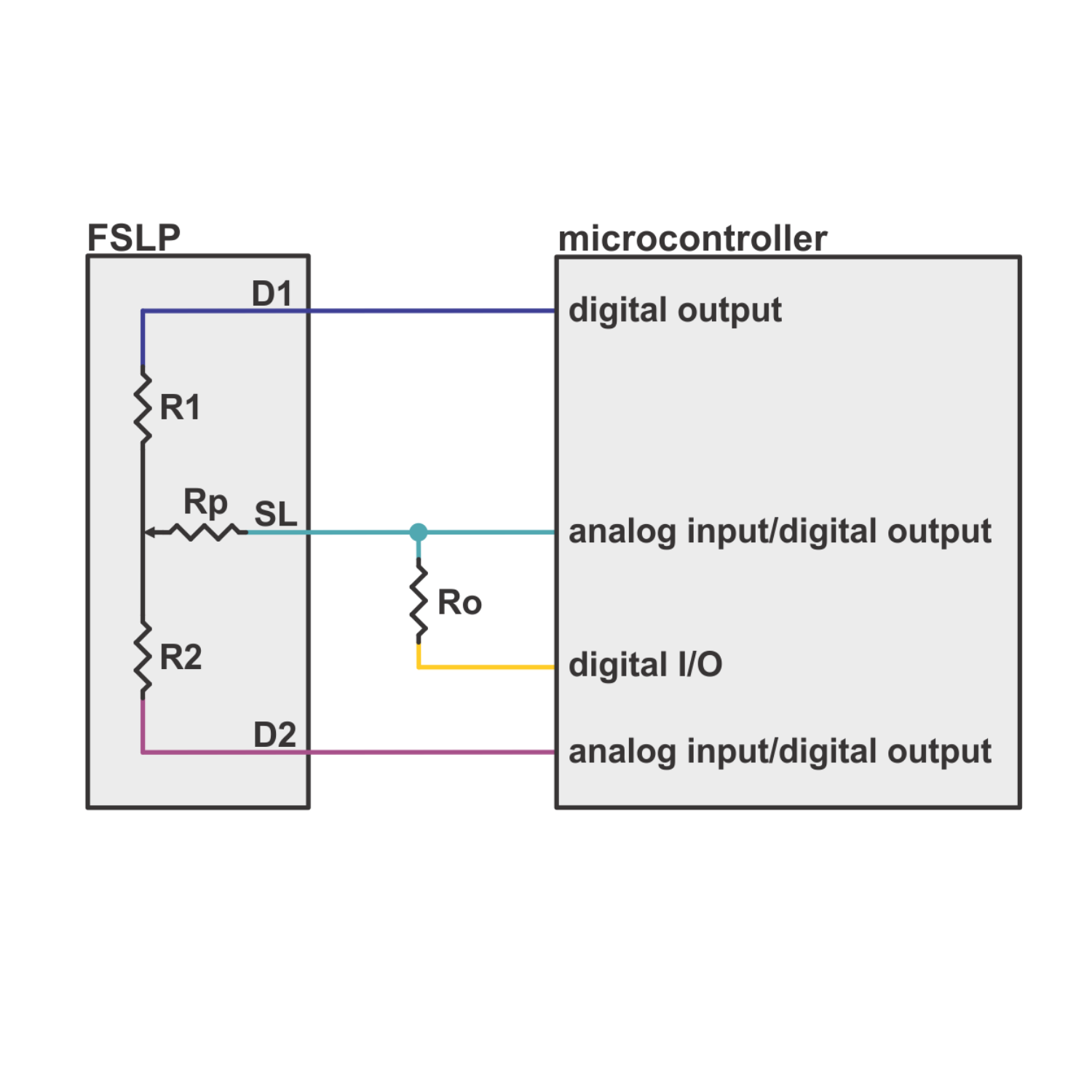
La resistencia Rp depende directamente de la magnitud de la presión aplicada, variando desde aproximadamente 300 kΩ con toques muy ligeros hasta aproximadamente 1 kΩ al presionar con fuerza. Si el pin conectado a D1 se pone en estado alto y el pin conectado a la parte inferior de la resistencia Ro se pone en estado bajo, el pin SL se convierte en la salida de un divisor de tensión resistivo con Rp en el extremo superior y la resistencia externa Ro en el extremo inferior. La medición de la tensión en el terminal D2 proporciona la tensión de entrada a este divisor de tensión dependiente de la presión y permite realizar la medición de presión independientemente de R1 y R2, que varían según el punto de contacto de la tira. Una vez medidas la entrada (tensión en D2) y la salida (tensión en SL) del divisor de tensión, se dispone de toda la información necesaria para calcular Rp, que está directamente relacionada con la presión.
El valor óptimo de Ro depende de la aplicación específica, pero un valor entre 4,7 kΩ y 10 kΩ debería funcionar correctamente para la mayoría de los proyectos.
Tenga en cuenta que cuando no se aplica presión a la tira, Rp debería ser de varios megaohmios y la tensión en SL se reducirá casi por completo a cero a través de Ro. Esto permite determinar cuándo no se está tocando la tira.
Posición de medición
La tira también funciona como un potenciómetro lineal, donde la presión aplicada (por ejemplo, la del dedo) actúa como cursor. A medida que el punto de presión se desplaza de un extremo a otro de la tira, R1 disminuye y R2 aumenta, o viceversa (la suma de R1 y R2 suele ser de unos 10 kΩ). Si el pin conectado a D1 se activa a nivel alto y el pin conectado a D2 a nivel bajo, el pin SL se convierte en la salida de este potenciómetro lineal (el pin conectado a la parte inferior de Ro debe configurarse como una entrada de alta impedancia para eliminar Ro del circuito). La tensión en el pin SL debe variar de 0 a Vcc (nivel lógico bajo a nivel lógico alto) a medida que el punto de aplicación de la presión se desplaza de un extremo al otro.
Tenga en cuenta que, cuando no se aplica presión a la tira, el pasador SL queda prácticamente flotante y no proporciona una medición de posición útil. Como se describe en la sección anterior, puede usar la lectura de presión para determinar cuándo no se toca la tira y así saber cuándo ignorar la medición de posición.
Nota: El extremo del sensor no incluye conector, y soldar directamente a las almohadillas de cobre expuestas probablemente no sea práctico para la mayoría de las aplicaciones debido a su paso relativamente fino de 1 mm. Puede ocupar conectores para cable plano o FFC.