$240.00 MXN (IVA Incluido)
11 disponibles
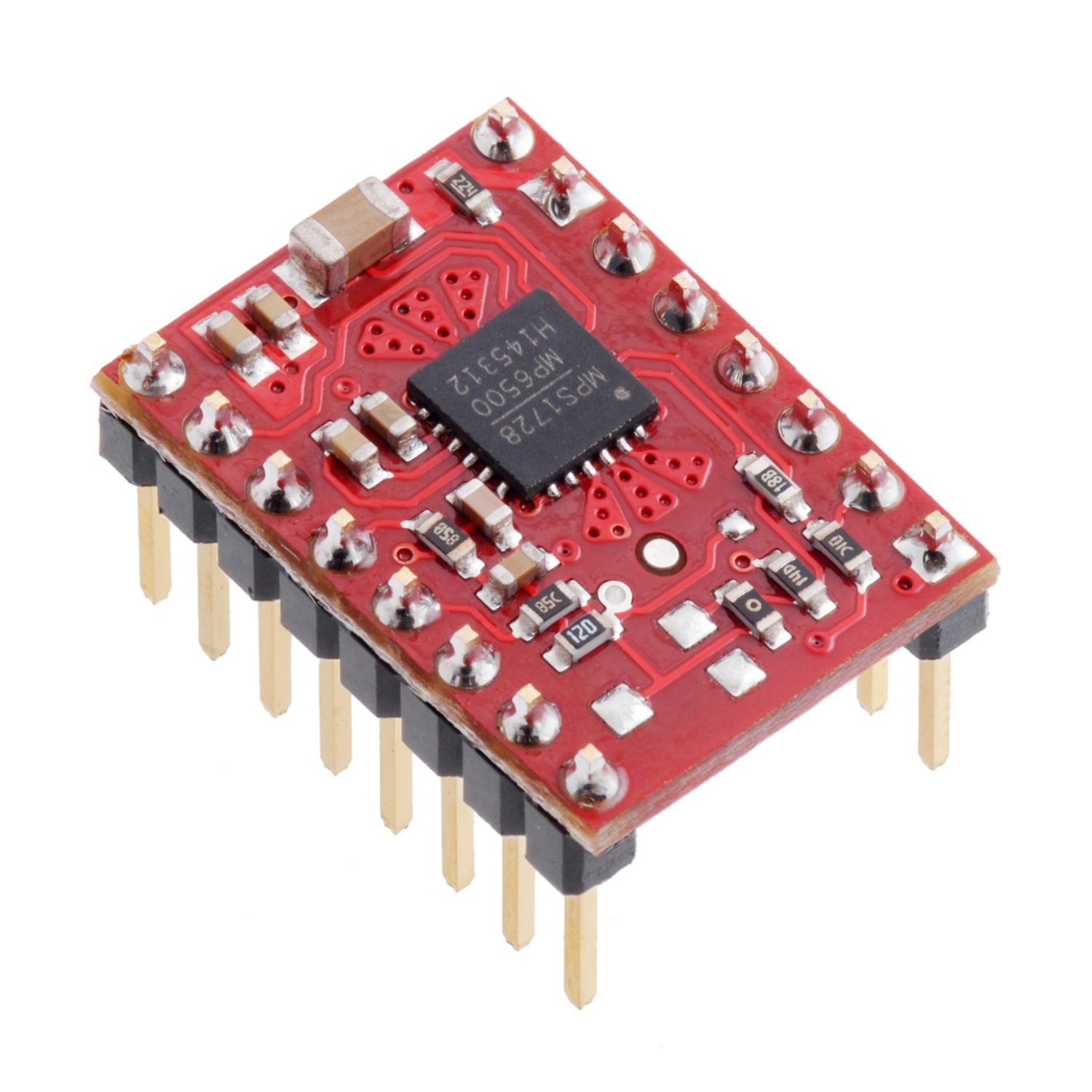
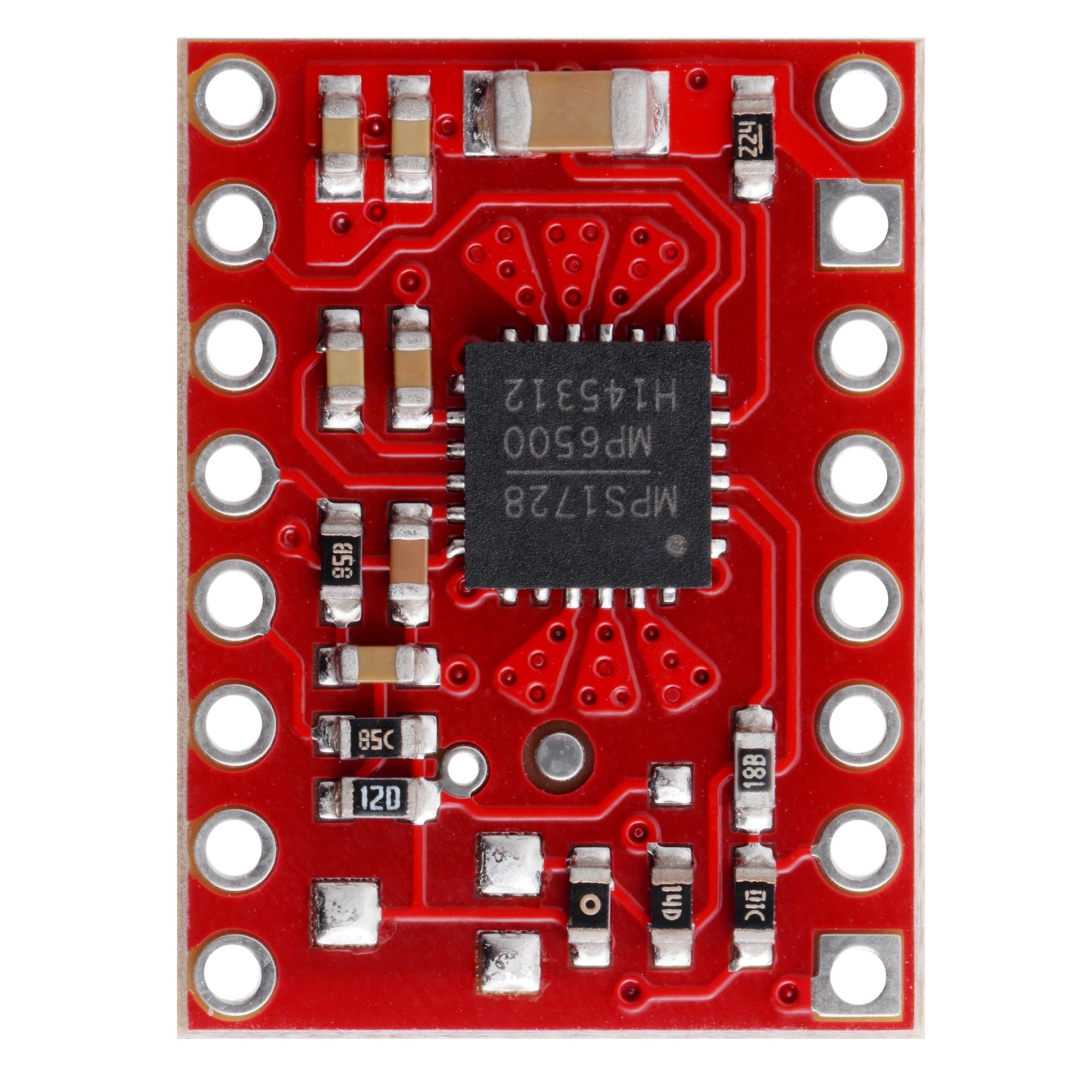
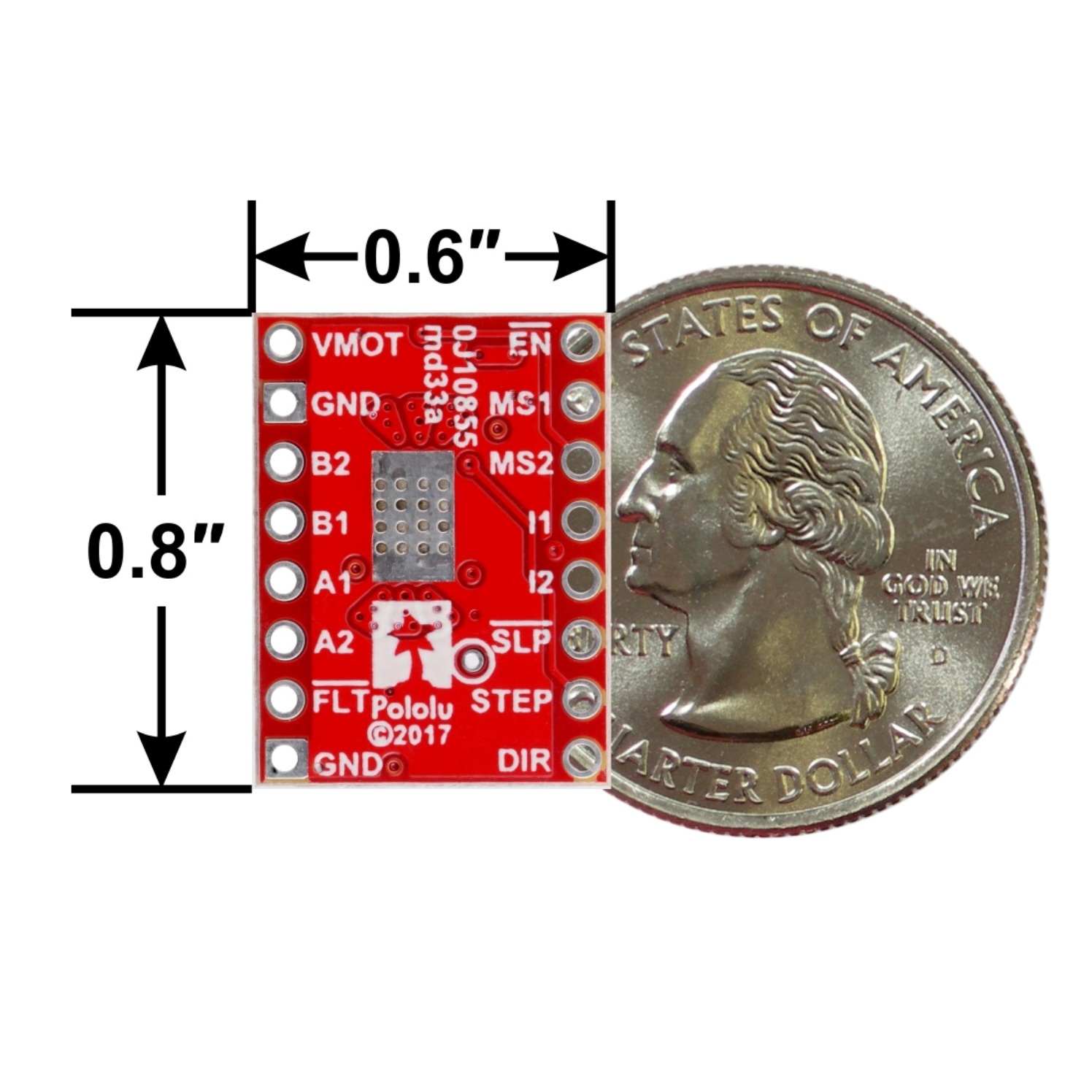
Esta placa de arranque para el controlador de motor a pasos bipolar de micropaso MPS MP6500 tiene un pinout y una interfaz que son muy similares a las de los controladores A4988, por lo que puede usarse como un reemplazo para esas tarjetas en muchas aplicaciones. El MP6500 ofrece microstepping de hasta 1/8 de paso, funciona de 4.5V a 35V y puede entregar hasta aproximadamente 1.5A por fase continuamente sin un disipador de calor o flujo de aire forzado.
Localización: D5
| Fabricante | Pololu |
|---|---|
| Descuento | 5 o más $228.00 |
11 disponibles
Este producto es una tarjeta de soporte para el controlador de motor a pasos MP6500 de Monolithic Power Systems (MPS); por lo tanto, recomendamos una lectura cuidadosa de la hoja de datos del MP6500 (1 MB pdf) antes de usar este producto. Este controlador le permite controlar un motor a pasos bipolar a aproximadamente 1,5A por fase de manera continua sin un disipador de calor o flujo de aire forzado (consulte la sección Consideraciones sobre la disipación de energía a continuación para obtener más información). Estas son algunas de las características clave del controlador:
Este controlador puede controlar algunos motores paso a paso unipolares (por ejemplo, aquellos con seis u ocho conductores) como motores paso a paso bipolares. Para obtener más información, consulte las preguntas más frecuentes. Los motores unipolares con cinco conductores no pueden utilizarse con este controlador.
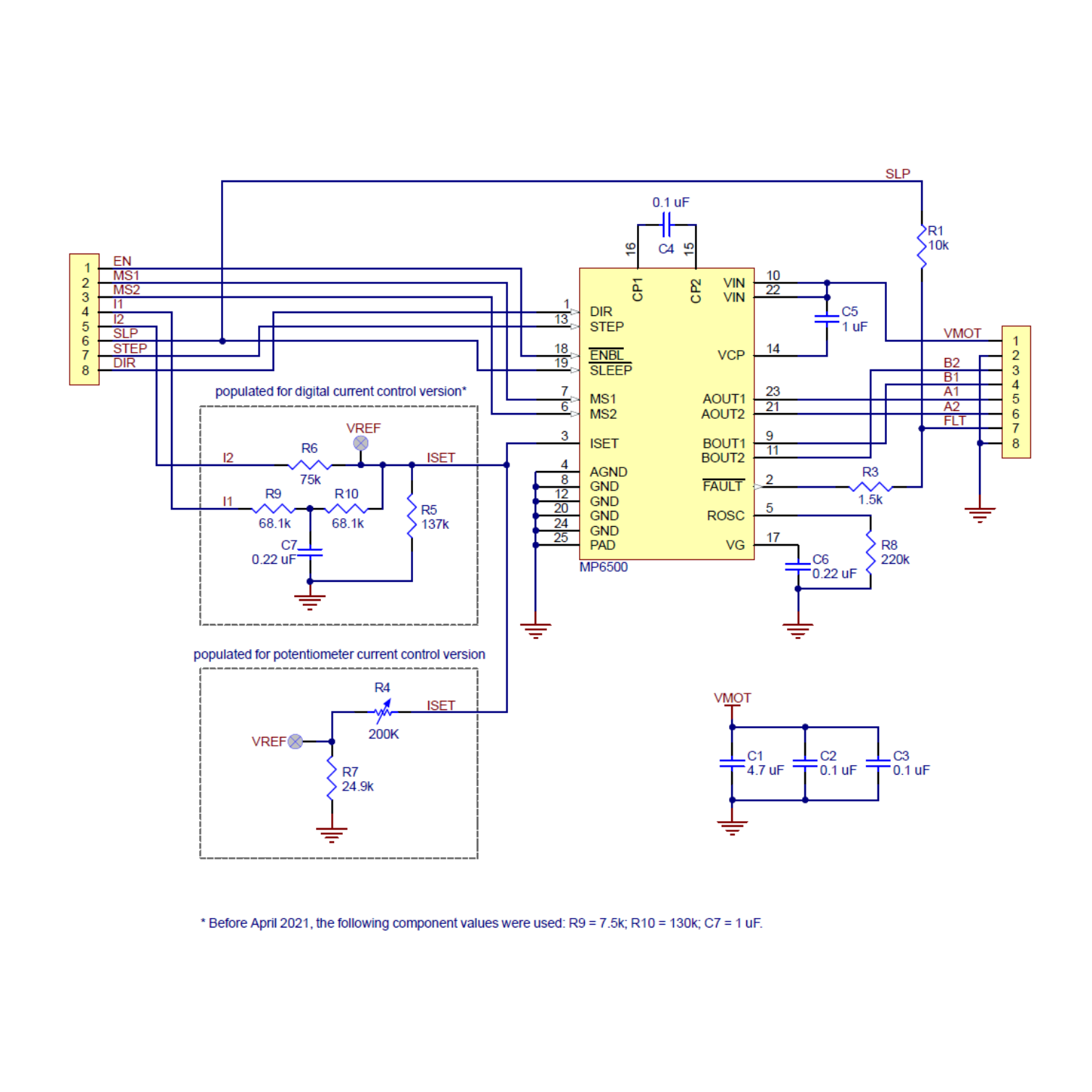
Esta versión del controlador de motor a pasos MP6500 ofrece control de corriente digital a través de sus entradas I1 e I2, lo que permite que un microcontrolador realice ajustes dinámicos de límite de corriente. Consulte la sección de Limitación de corriente a continuación para obtener más detalles sobre cómo controlar el límite de corriente.
A diferencia de otros controladores los cabezales están incluidos e instalados en la tarjeta.
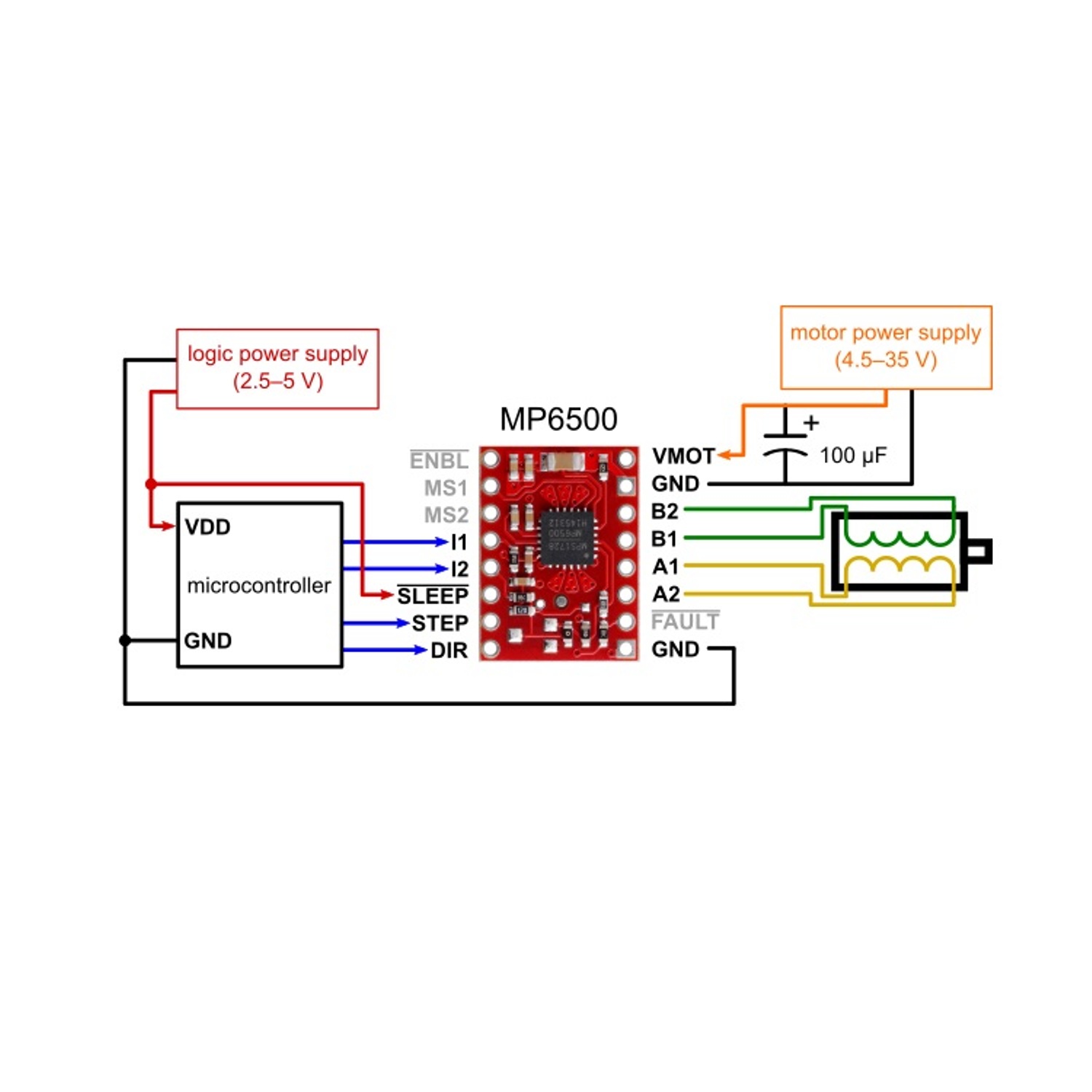
El controlador requiere una tensión de alimentación del motor de 4,5 V a 35 V para conectarse a través de VMOT y GND. Esta fuente debe tener capacitores de desacoplamiento apropiados cerca de la placa y debe ser capaz de suministrar la corriente esperada del motor paso a paso. El controlador tiene un regulador de voltaje interno, por lo que no requiere un suministro de voltaje lógico.
Advertencia: esta tarjeta utiliza condensadores cerámicos de bajo ESR, lo que la hace susceptible a picos destructivos de voltaje del LC, especialmente cuando se usan cables de alimentación de más de unas pocas pulgadas. Bajo las condiciones adecuadas, estos picos pueden exceder el voltaje máximo absoluto de 40 V para el MP6500 y dañar permanentemente la placa, incluso cuando el voltaje de alimentación del motor es tan bajo como 12 V. Una forma de proteger al controlador de dichos picos es colocar un condensador electrolítico grande (al menos 47 µF) a través de la potencia del motor (VMOT) y tierra en algún lugar cerca de la placa.
Los motores a pasos de cuatro, seis y ocho cables pueden ser accionados por el MP6500 si están correctamente conectados; Consulte la sección FAQ en donde se explica en detalle los cableados adecuados.
Advertencia: la conexión o desconexión de un motor paso a paso mientras el controlador está encendido puede destruirlo. (De manera más general, volver a cablear algo mientras está encendido es buscar problemas).
Los motores paso a paso generalmente tienen una especificación de tamaño de paso (por ejemplo, 1.8° o 200 pasos por revolución), que se aplica a los pasos completos. Un controlador de microstepping como el MP6500 permite resoluciones más altas al permitir ubicaciones de pasos intermedios, que se logran energizando las bobinas con niveles de corriente intermedios. Por ejemplo, controlar un motor en modo de cuarto de paso le dará al motor de 200 pasos por revolución 800 microsteps por revolución al usar cuatro niveles de corriente diferentes.
Las entradas del selector de resolución (tamaño de paso) (MS1 y MS2) permiten la selección de las cuatro resoluciones de paso según la tabla a continuación. Estos dos pines se bajan a través de resistencias desplegables internas de 500 kΩ, por lo que el controlador se establece por defecto en el modo de paso completo cuando estas entradas se dejan desconectadas. Para que los modos de microstep funcionen correctamente, el límite de corriente debe establecerse lo suficientemente bajo (ver más abajo) para que la limitación de corriente se active. De lo contrario, los niveles de corriente intermedios no se mantendrán correctamente y el motor omitirá los microsteps.
| MS1 | MS2 | Resolución de Microstep |
|---|---|---|
| Low | Low | Paso completo |
| High | Low | Medio paso (1/2) |
| Low | High | Cuarto de paso (1/4) |
| High | High | Octavo de paso(1/8) |
Cada impulso a la entrada STEP corresponde a un microstep del motor paso a paso en la dirección seleccionada por el pin DIR. Estas entradas se reducen por defecto a través de resistencias desplegables internas de 500 kΩ. Si solo desea la rotación en una sola dirección, puede dejar DIR desconectado.
El chip tiene dos entradas diferentes para controlar sus estados de potencia: SLEEP y ENBL. Para detalles sobre estos estados de energía, vea la hoja de datos. Tenga en cuenta que el controlador tira de ambos pines a través de las resistencias desplegables internas de 500 kΩ. El estado predeterminado de SLEEP evita que el controlador funcione; este pin debe ser alto para habilitar el controlador (se puede conectar directamente a un voltaje «alto» lógico entre 2.5 V y 5 V, o se puede controlar dinámicamente conectándolo a una salida digital de una MCU). El estado predeterminado del pin ENBL es habilitar el controlador, por lo que este pin se puede dejar desconectado.
El MP6500 también cuenta con una salida de FAULT de drenaje abierto que disminuye cuando los FET de puente H se desactivan como resultado de la protección contra sobrecorriente, protección contra sobretensión, apagado térmico o bloqueo de baja tensión. El controlador conecta este pin al pin SLEEP a través de una resistencia de 10 kΩ que actúa como un pull-up FAULT cada vez que SLEEP se mantiene alto en el exterior, por lo que no es necesario un pull-up externo en el pin FAULT. Tenga en cuenta que el controlador incluye una resistencia de protección de 1.5 kΩ en serie con el pin FAULT que hace que sea seguro conectar este pin directamente a una fuente de voltaje lógico, como podría ocurrir si usa esta placa en un sistema diseñado para el A4988 compatible con el pin. En un sistema de este tipo, la resistencia de 10 kLE entre SLEEP y FAULT actuaría entonces como un impulso para SLEEP, lo que hace que el controlador MP6500 sea más un reemplazo directo del A4988 en tales sistemas (el A4988 tiene un levantamiento interno en su Pin SLEEP).
Como consecuencia de la conexión entre SLEEP y FAULT, las fallas activas pueden tirar del pin SLEEP hacia abajo (por debajo de 2.1 V) si no se ha levantado lo suficientemente externamente. Recomendamos que cualquier resistencia de pull-up usada con SLEEP sea 4.7 kΩ o más fuerte (o simplemente conecte SLEEP directamente a VCC).
Para lograr altas tasas de paso, el suministro del motor es generalmente más alto de lo que sería permisible sin limitación de corriente activa. Por ejemplo, un motor a pasos típico podría tener una corriente nominal máxima de 1 A con una resistencia de la bobina de 5, lo que indicaría un suministro máximo de motor de 5 V. El uso de un motor de este tipo con 9 V permitiría tasas de paso más altas, pero la corriente debe limitarse activamente a menos de 1 A para evitar daños en el motor. Por lo general, deseará establecer que el límite de corriente del conductor esté en o por debajo de la clasificación actual de su motor paso a paso.
Esta versión de la portadora MP6500 (a diferencia de la que tiene un potenciómetro) usa las entradas I1 e I2 para establecer el límite de corriente. Para el control basto, estas entradas pueden ser activadas a baja o configuradas a alta impedancia para proporcionar cuatro configuraciones de límites diferentes en incrementos de aproximadamente 500 mA:
| I1 | I2 | Corriente Límite |
|---|---|---|
| Z | Z | 0.5 A |
| Low | Z | 1 A |
| Z | Low | 1.5 A |
| Low | Low | 2 A |
Si tanto I1 como I2 están desconectados, el límite actual por defecto es de 0,5 A.
Para un control más preciso, se puede suministrar una tensión analógica o PWM al pin I1 mientras I2 está bajo:
La ecuación para estas curvas es:
límite de corriente = 2.2 A − 0.63 A/V × (voltaje analógico en I1)
Recomendamos utilizar una frecuencia PWM de 1 kHz o superior.
En la práctica, a menudo hemos observado que el límite de corriente real cuando se usa el control analógico o PWM es aproximadamente un 10% (a veces hasta un 15%) más bajo de lo que muestran la ecuación y los gráficos. Sin embargo, al accionar digitalmente los pines I1 e I2 para el control basto, el circuito limitador de corriente debe producir pasos de 0.5 A bastante precisos, como se indica en la tabla anterior.
El nodo VREF en esta versión del portador del conductor del motor paso a paso MP6500 no significa nada; Siempre estará entre alrededor de 0,8 V y 1 V.
Nota: La corriente de la bobina puede ser muy diferente de la corriente de la fuente de alimentación. Si desea confirmar que su configuración de límite actual coincide con lo que espera, el lugar adecuado para colocar su medidor actual es en serie con una de sus bobinas de motor a pasos. Si el controlador está en modo de paso completo, ambas bobinas estarán siempre encendidas y limitadas a aproximadamente el 70% del límite actual. Si su conductor se encuentra en uno de los modos de microaspado, la corriente a través de las bobinas cambiará con cada paso, que va del 0% al 100% del límite establecido. Consulte la hoja de datos del MP6500 para obtener más información.
El IC del controlador MP6500 tiene una clasificación de corriente máxima de 2.5 A por bobina, pero la corriente real que puede entregar depende de qué tan bien puede mantener el IC fresco. La placa de circuito impreso está diseñada para extraer calor del IC, pero para suministrar más de aproximadamente 1.5 A por bobina, se requiere un disipador de calor u otro método de enfriamiento. Tenga en cuenta que la versión de esta placa con control de corriente digital tiene una configuración de límite de corriente máxima de alrededor de 2 A.
Este producto puede calentarse lo suficiente como para producir quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Tenga en cuenta que medir el consumo de corriente en la fuente de alimentación generalmente no proporcionará una medida precisa de la corriente de la bobina. Como el voltaje de entrada al controlador puede ser significativamente más alto que el voltaje de la bobina, la corriente medida en la fuente de alimentación puede ser un poco más baja que la corriente de la bobina (el controlador y la bobina actúan básicamente como una fuente de alimentación de reducción). Además, si la tensión de alimentación es muy alta en comparación con lo que necesita el motor para alcanzar la corriente establecida, el ciclo de trabajo será muy bajo, lo que también conduce a diferencias significativas entre las corrientes promedio y RMS. Además, tenga en cuenta que la corriente de la bobina es una función del límite de corriente establecido, pero no necesariamente equivale al ajuste del límite de corriente, ya que la corriente real a través de cada bobina cambia con cada microstep.
El esquema está disponible como un pdf descargable (118k pdf).






$640.00 MXN (IVA Incluido)
$2,180.00 MXN (IVA Incluido)