$830.00 MXN (IVA Incluido)
5 disponibles
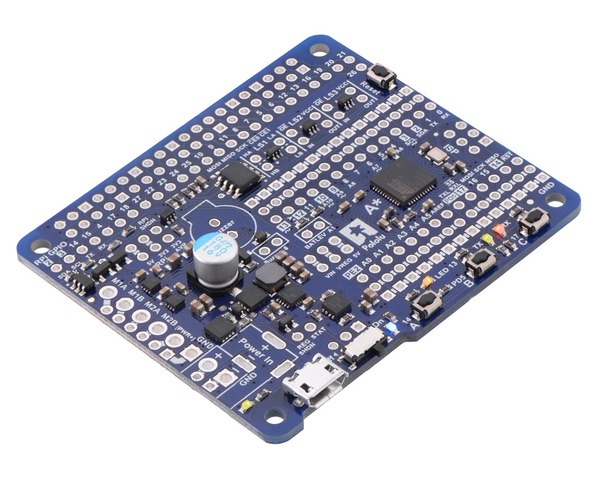
Este módulo programable se combina con una Raspberry Pi para servir como centro de control de un proyecto pequeño robot o electrónica. Su microcontrolador Atmel ATmega32U4 viene precargado con un cargador de arranque compatible con Arduino, y el tablero incluye controladores duales de motor que pueden entregar 1,8 A por canal a dos motores de corriente continua. Un regulador de tensión eficaz (entrada de 2,7 V a 11 V) y el cambio a nivel permiten poder y comunicarse con un Raspberry Pi. Esta versión está montada con conectores seleccionados a través de hoyos y componentes instalados para su uso como complemento Raspberry Pi.
Localización: D6
| Peso | 0.08 kg |
|---|---|
| Fabricante | Pololu |
5 disponibles
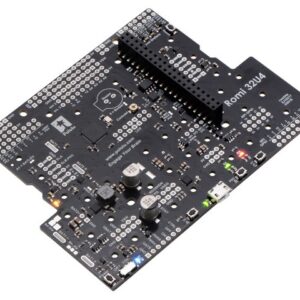
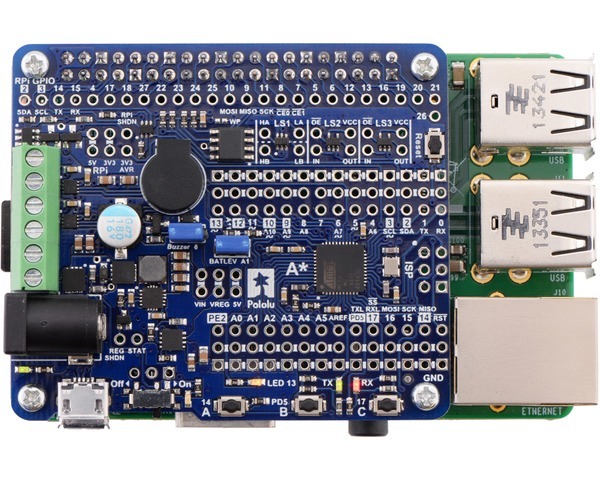
El controlador de robot A-Star 32U4 LV con puente Raspberry Pi es un módulo programable ideal para aplicaciones robóticas, diseñado para funcionar como un controlador auxiliar montado en una Raspberry Pi o como una solución de control independiente para un robot pequeño. Este A-Star (abreviado A*) se basa en el microcontrolador ATmega32U4 AVR de Microchip (anteriormente Atmel), que tiene funcionalidad USB incorporada y se entrega con un cargador de arranque compatible con Arduino precargado. Su complemento de hardware periférico incluye controladores de motor duales capaces de entregar 1,8 A continuos por canal, junto con pulsadores, LED y un zumbador opcional para construir una interfaz de usuario. Un regulador de voltaje de conmutación eficiente permite que el controlador funcione en una amplia gama de voltajes de entrada (2,7 V a 11 V).
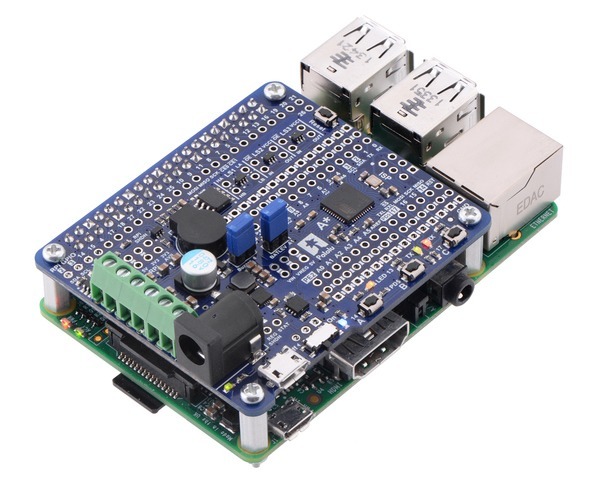
La placa controladora del robot cumple con la especificación Raspberry Pi HAT, lo que permite su uso como complemento para una Raspberry Pi con un conector GPIO de 40 pines (modelo B+ o más reciente, incluidos Pi 3 modelo B+ y modelo A+). Los cambiadores de nivel integrados facilitan la configuración de la comunicación I²C y la interconexión de otras señales entre los dos controladores, y el A-Star suministra automáticamente 5 V de potencia a una Raspberry Pi conectada. En esta configuración, la Raspberry Pi puede manejar el control del robot de alto nivel mientras depende del A-Star para tareas de bajo nivel como leer sensores analógicos y controlar dispositivos sensibles al tiempo (por ejemplo, servos).
Ofrecemos una biblioteca que ayuda a establecer la comunicación entre el A-Star y una Raspberry Pi, así como un tutorial que demuestra cómo utilizar la biblioteca y su código de ejemplo incluido para construir un robot de este tipo.
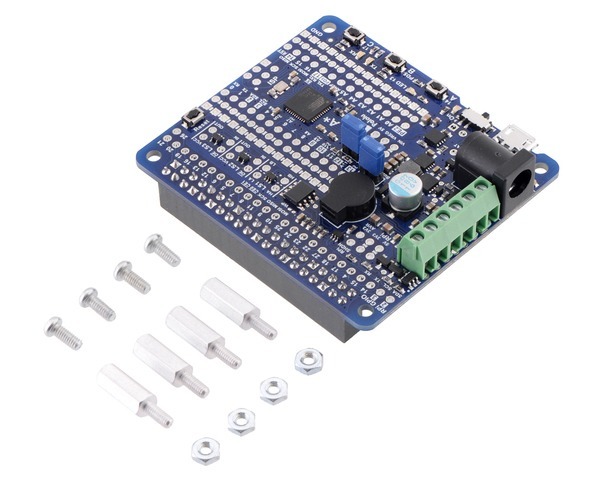
Esta versión del controlador de robot A-Star 32U4 LV con puente Raspberry Pi (voltaje de entrada de 2,7V a 11V) se ensambla con conectores y componentes de orificio pasante seleccionados para usar como una placa de expansión Raspberry Pi, como se muestra en la imagen de arriba. Se preinstala un cabezal hembra de 2 × 20 pines de 0,1″ para que funcione como conector GPIO de Raspberry Pi, y se montan una tira de bloques de terminales de 6 pines y un conector de alimentación de DC para las conexiones de motor y energía. También se instala un timbre, junto con dos cabezales macho de 2 × 1 pin y bloques de cortocircuito para el timbre y los puentes de nivel de batería.
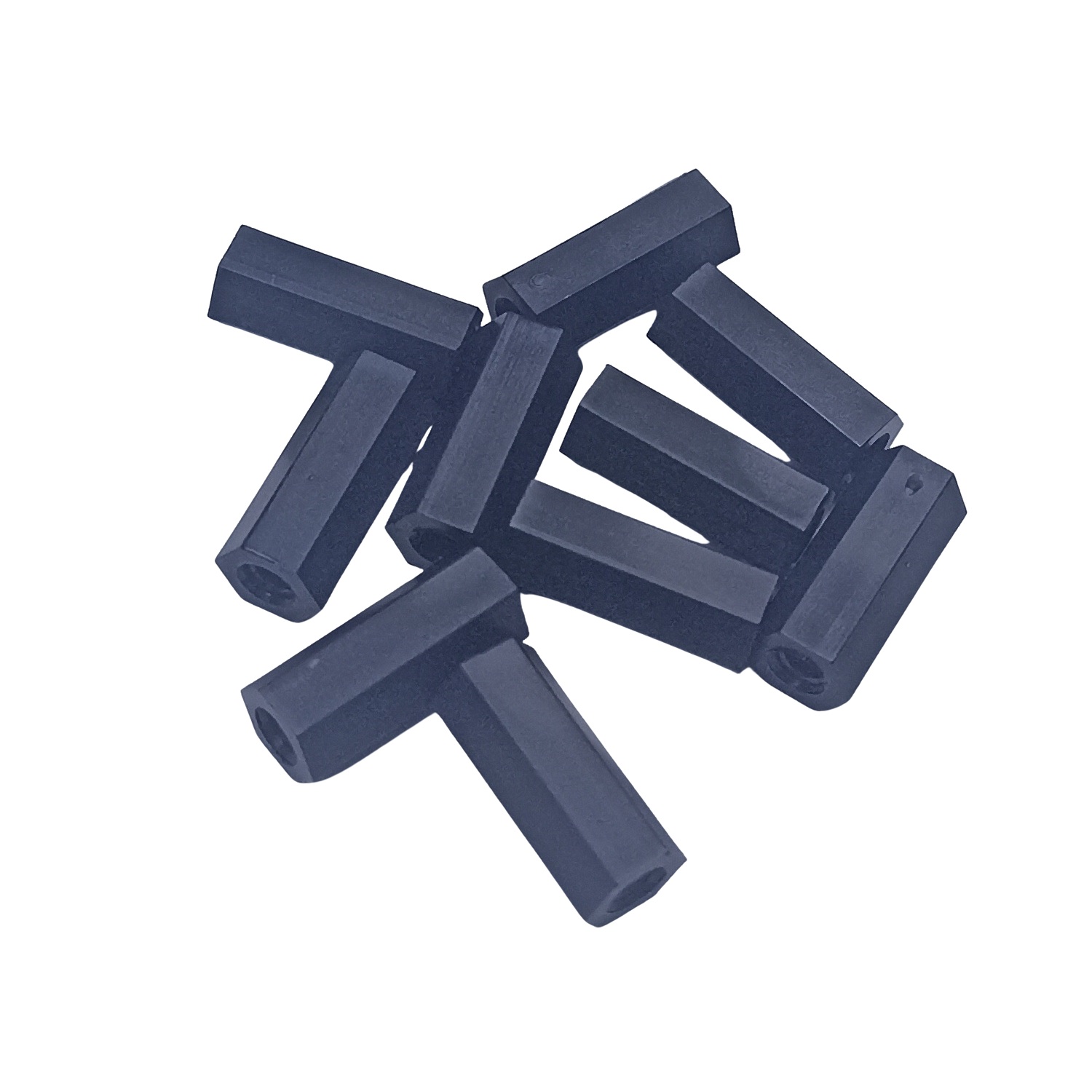
Esta versión se envía con un juego de cuatro separadores M2.5 (11 mm de longitud), tornillos y tuercas que se pueden usar para asegurar la placa a la Raspberry Pi a la altura adecuada para el conector GPIO.
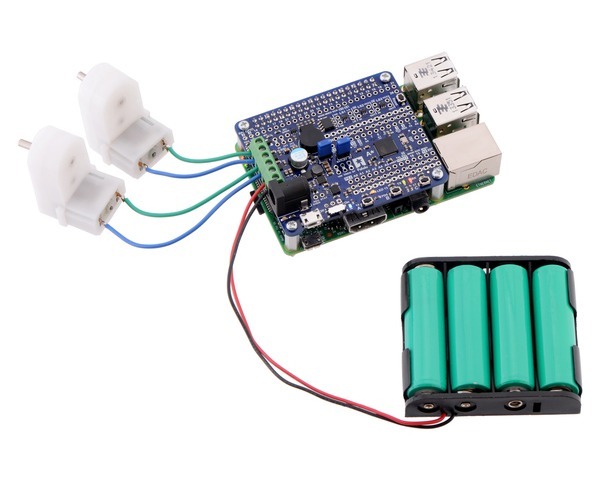
Una característica importante del controlador de robot A* LV es su sistema de alimentación, que le permite funcionar de manera eficiente con una fuente externa de 2,7 V a 11 V y proporcionar alimentación a una Raspberry Pi conectada. El voltaje de entrada se regula a 5 V mediante un convertidor elevador/reductor (buck-boost) TPS63061 de Texas Instruments. (También fabricamos un regulador independiente basado en este circuito integrado). La flexibilidad del regulador en el voltaje de entrada es especialmente adecuada para aplicaciones alimentadas por batería en las que el voltaje de la batería comienza por encima de los 5 V y cae por debajo de los 5 V a medida que la batería se descarga. Sin la restricción típica de que el voltaje de la batería se mantenga por encima de los 5 V durante su vida útil, se puede considerar una gama más amplia de tipos de batería. Por ejemplo:
Se puede utilizar un soporte de batería de 4 celdas, que puede tener una salida de 6 V con pilas alcalinas nuevas o una salida de 4,0 V con celdas de NiMH parcialmente descargadas, para alimentar este A*.
Una batería desechable de 9 V que alimenta la placa se puede descargar por debajo de los 3 V en lugar de cortarse a 6 V, como sucede con los reguladores lineales o reductores típicos.
Como se muestra en el gráfico de la izquierda a continuación, el regulador de conmutación de 5 V del LV tiene una eficiencia (definida como (potencia de salida)/(potencia de entrada)) del 80 % al 90 % para la mayoría de las combinaciones de voltaje de entrada y carga.
Los componentes del A-Star, incluidos el microcontrolador y los LED, consumen entre 30 mA y 40 mA en aplicaciones típicas (sin el zumbador). El resto de la corriente de salida alcanzable del regulador, que depende del voltaje de entrada y de las condiciones ambientales, se puede utilizar para alimentar otros dispositivos; esto puede incluir una Raspberry Pi conectada (que normalmente consume unos cientos de miliamperios). La línea azul en el gráfico de la derecha anterior muestra las corrientes de salida en las que la protección contra sobretemperatura del regulador de voltaje normalmente se activa después de unos segundos. Estas corrientes representan el límite de la capacidad del regulador y no se pueden mantener durante períodos prolongados; en condiciones de funcionamiento típicas, un límite seguro para la corriente de salida continua máxima del regulador es del 60 % al 70 % de los valores que se muestran en el gráfico.
Al igual que nuestros otros controladores programables A-Star 32U4, el controlador de robot A-Star 32U4 se entrega con un cargador de arranque compatible con Arduino precargado (que utiliza 4 KB de memoria flash, dejando 28 KB disponibles para el programa del usuario). Ofrecemos un complemento de software que permite programar fácilmente la placa desde el entorno Arduino y una biblioteca Arduino para facilitar el uso del hardware adicional integrado.
El controlador de robot A-Star 32U4 tiene el mismo microcontrolador que Arduino Leonardo y Arduino Micro, y funciona a la misma frecuencia, por lo que la mayoría de los ejemplos de código destinados a esas placas también deberían funcionar en A-Star.
El controlador de robot A-Star 32U4 es parte de nuestra familia más grande A-Star 32U4, cuyos miembros se basan en el mismo microcontrolador ATmega32U4, cuentan con interfaces USB nativas y están precargados con cargadores de arranque compatibles con Arduino. La siguiente tabla muestra algunas características y especificaciones clave de nuestras placas de microcontrolador A-Star para ayudarlo a elegir la adecuada para su aplicación.
| A-Star 328PB Micro | A-Star 32U4 Micro | A-Star 32U4 Mini ULV | A-Star 32U4 Prime LV | Controlador de robot A-Star 32U4 LV | |
| A-Star 32U4 Mini LV | A-Star 32U4 Prime SV | Controlador de robot A-Star 32U4 SV | |||
| A-Star 32U4 Mini SV | |||||
| Microcontrolador: | ATmega328PB | ATmega32U4 | |||
| Lineas I/O del usuario: | 24 | 18 | 26 | 26(1) | 26(1) |
| Salidas PWM disponibles: | 9 | 6 | 7 | 7 | 7(1) |
| Entradas analógicas: | 8 | 8 | 12 | 12 | 12(1) |
| Puntos de acceso a tierra: | 6 | 2 | 4 | 43 | 44 |
| LEDs de usuario: | 1 | 2 | 3 | 3 | 3 |
| Pushbuttons de usuario: | — | — | — | 3 | 3 |
| Interfaz USB: | Si | Si | Si | Si | |
| Botones de reset: | Si | Si | Si | Si | |
| Interruptor de energía: | Si | Si | |||
| Opción de zumbador: | Si | Si | |||
| Opción de microSD: | Si | ||||
| Opción de LCD: | Si | ||||
| Controladores de Motor: | Si | ||||
| Voltaje operativo: | 3.3V VCC: 3.8V a 15V | 5.5V a 15 V | ULV: 0.5V a 5.5V | LV: 2V a 16V | LV: 2.7V a 11V |
| 5V VCC: 5.5V a 15V | LV: 2.7V a 11.8V | SV: 5V a 36V | SV: 5.5V a 36V | ||
| SV: 5V a 40V | |||||
| Tipo de regulador: | 3.3V o 5V lineal | 5V lineal | 5V switching | 5V switching | 5V switching |
| ULV: step-up | LV: step-up/step-down | LV: step-up/step-down | |||
| LV: step-up/step-down | SV: step-down | SV: step-down | |||
| SV: step-down | |||||
| Corriente regulada:(2) | 100 mA | 100 mA | ULV: 500mA | LV: 1.8A | LV: 1 A |
| LV: 1A | SV: 1A | SV: 1.5 A | |||
| SV: 800mA | |||||
| Dimensiones: | 1.3” × 0.7″ | 1″ × 0.6″ | 1.9″ × 0.7″ | 2.8″ × 2.1″ | 2.6″ × 2.2″ |
| Peso: | 1.5 g(3) | 1.3 g(3) | 3.4 g(3) | 13g a 33g | 14g a 23g |