$620.00 MXN (IVA Incluido)
Sin existencias
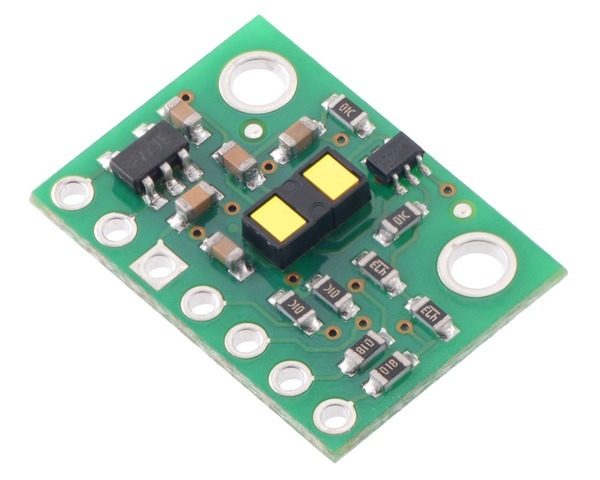
Este sensor ofrece un alcance rápido y preciso de hasta 4m. Utiliza el tiempo de vuelo (ToF) de los pulsos de láser invisibles y seguros para los ojos para medir distancias absolutas independientemente de las condiciones de iluminación ambiental y las características del objetivo como el color, la forma y la textura (aunque estas cosas afectarán el rango máximo). También presenta una región de interés programable (ROI), con el cual puede reducir o dividir en varias zonas. La placa incluye un regulador lineal de 2.8 V y cambiadores de nivel que le permiten trabajar en un rango de voltaje de entrada de 2.6V a 5.5V, y el espaciado de pin de 0.1″ hace que sea fácil de usar con placas de prueba de 0.1″.
Localización: C6
| Fabricante | Pololu |
|---|
Sin existencias
El VL53L1X es un sensor de larga distancia de tiempo de vuelo (Time Of Flight o TOF) integrado en un módulo compacto. Esta placa es una portadora para el VL53L1X, por lo que recomendamos una lectura cuidadosa de la hoja de datos VL53L1X (1MB pdf) antes de usar este producto.
El VL53L1X es efectivamente un sistema lidar pequeño e independiente con un láser integrado de clase 940 nm, que es invisible y seguro para los ojos. A diferencia de los sensores infrarrojos convencionales que usan la intensidad de la luz reflejada para estimar la distancia a un objeto, el VL53L1X utiliza la tecnología FlightSense de ST para medir con precisión el tiempo que tardan los pulsos emitidos de luz láser infrarroja en alcanzar el objeto más cercano y reflejarse en un detector. Este enfoque garantiza mediciones absolutas de distancia independientemente de las condiciones de iluminación ambiental y las características del objetivo (por ejemplo, color, forma, textura y reflectividad), aunque estas condiciones externas afectan el rango máximo del sensor, al igual que los ajustes de configuración del sensor.
En condiciones favorables, como luz ambiental baja con un objetivo de alta reflectividad, el sensor puede informar distancias de hasta 4 m (13 pies) con una resolución de 1 mm. Consulte la hoja de datos para obtener más información sobre cómo las diversas condiciones externas y las configuraciones de los sensores afectan aspectos como el rango máximo, la repetibilidad y el error de rango. La distancia mínima de alcance es de 4 cm; dentro de este rango, el sensor aún detectará un objetivo, pero la medición no será precisa. Las mediciones de rango están disponibles a través de la interfaz I²C (TWI) del sensor, que también se usa para configurar los ajustes del sensor, y el sensor proporciona dos pines adicionales: una entrada de apagado y una salida de interrupción.
El VL53L1X ofrece tres modos de distancia: corto, mediano y largo. El modo de larga distancia permite la distancia de alcance más larga posible de 4 m, pero el alcance máximo se ve significativamente afectado por la luz ambiental. El modo de corta distancia es en su mayoría inmune a la luz ambiental, pero la distancia máxima de alcance se limita típicamente a 1.3 m (4.4 pies). La velocidad de muestreo máxima en el modo de corta distancia es de 50 Hz, mientras que la velocidad de muestreo máxima para los modos de media y larga distancia es de 30 Hz. El rendimiento se puede mejorar en todos los modos mediante el uso de tasas de muestreo más bajas y presupuestos de tiempo más largos (como se puede ver en la figura anterior).
Para aplicaciones avanzadas, el VL53L1X admite umbrales configurables que se pueden usar para disparar interrupciones cuando un objetivo se detecta por debajo de cierta distancia, más allá de cierta distancia, fuera de un rango o dentro de un rango. También es compatible con un modo de detección alternativo que genera una interrupción cuando no hay un objetivo presente. Además, a diferencia de sus predecesores, el VL53L1X admite una región de interés configurable (ROI) dentro de su matriz de detección completa de 16 × 16, lo que le permite reducir el campo de visión (FoV). Con todos los 265 elementos de detección habilitados, el FoV es de 27 °. Está disponible un modo de «Baja potencia autónoma» que está especialmente ajustado para detección de presencia avanzada. Este modo permite un importante ahorro de energía del sistema apagando o despertando automáticamente el host cuando se detecta un ser humano o un objeto dentro de los umbrales de distancia configurados en la región de interés.
El VL53L1X es un gran IC, pero su pequeño paquete LGA, sin cable, hace que sea difícil para un estudiante o aficionado típico. También funciona con una tensión recomendada de 2,8 V, lo que puede dificultar la interconexión para microcontroladores que funcionan a 3,3 V o 5 V. Esta placa de aborda estos problemas, lo que facilita el inicio del uso del sensor, manteniendo el tamaño general tan pequeño como sea posible.
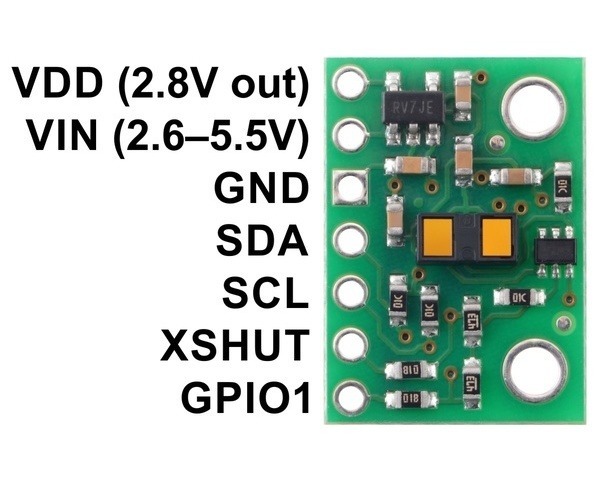
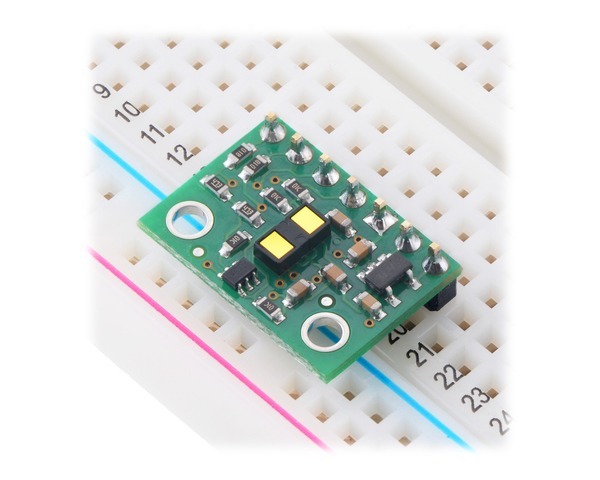
La placa incluye un regulador de voltaje lineal de baja caída que proporciona los 2,8 V requeridos por el VL53L1X y permite alimentar el sensor con un suministro de 2,6 V a 5,5 V. La salida del regulador está disponible en el pin VDD y puede suministrar casi 150 mA a dispositivos externos. La placa de separación también incluye un circuito que cambia el reloj I²C y las líneas de datos al mismo nivel de voltaje lógico que el VIN suministrado, lo que facilita la interfaz de la placa con sistemas de 3,3 V o 5 V, y el espaciado de pines de 0,1″ de la placa lo hace fácil de usar con placas de prueba sin soldadura estándar y perfboards de 0.1″. La placa se envía completamente llena con sus componentes SMD, incluido el VL53L1X, como se muestra en la imagen del producto.
Para sensores similares pero de rango más corto, vea la versión VL53L0X de 200 cm y la versión VL6180X de 60 cm. Ambos son reemplazos físicos para el VL53L1X, pero tienen diferentes API, por lo que el software para el VL53L1X deberá ser reescrito para funcionar con el VL53L0X o el VL6180X.
Se incluyen una tira de cabezales estándar de 1 × 7 de 0.1″ y una tira de cabezales de angulo de 1 × 7 de 0.1″, como se muestra en la imagen a continuación. Puede soldar la tira de cabezales de su elección a la placa para usar con cables personalizados o placas de prueba sin soldadura, o puede soldar cables directamente a la placa misma para instalaciones más compactas.
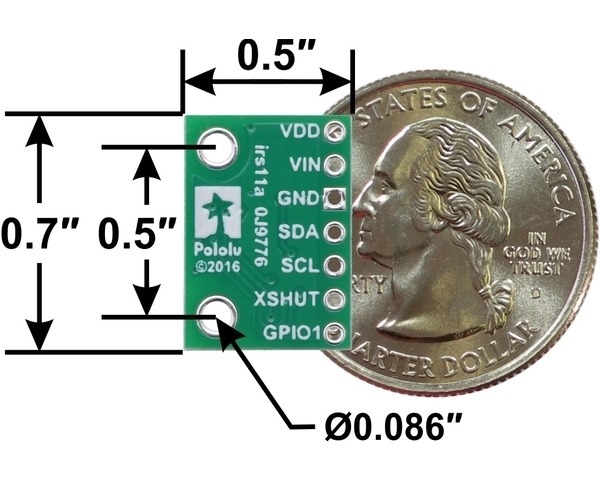
La placa tiene dos orificios de montaje espaciados a una distancia de 0.5″ que funcionan con tornillos #2 y M2 (no incluidos).
Nota importante: Este producto puede enviarse con un forro protector que cubra el sensor IC. El forro debe ser removido para un desempeño de detección apropiado.
Se necesitan al menos cuatro conexiones para usar la placa VL53L1X: VIN, GND, SCL y SDA. El pin VIN debe estar conectado a una fuente de 2.6 V a 5.5 V, y GND debe estar conectado a 0 voltios. Un regulador de voltaje lineal integrado convierte el VIN en un suministro de 2,8 V para el VL53L1X IC. Tenga en cuenta que si su voltaje de entrada es inferior a 3,5 V, puede conectarlo directamente a VDD para evitar el regulador; en esta configuración, VIN debe permanecer desconectado.
Los pines I²C, SCL y SDA, están conectados a los cambiadores de nivel integrados que los hacen seguros para usar a voltajes de más de 2.8 V; deben estar conectados a un bus I²C que funcione al mismo nivel lógico que VIN.
El pin XSHUT es una entrada y el pin GPIO1 es una salida de drenaje abierto; ambos pines son tirados hasta 2.8 V por la tabla. No están conectados a los controles de nivel en la placa y no son tolerantes a 5V, pero se pueden usar como están con muchos microcontroladores de 3,3 V y 5 V: el microcontrolador puede leer la salida GPIO1 siempre que su umbral lógico alto esté debajo 2.8 V, y el microcontrolador puede alternar su propia salida entre estados de baja y alta impedancia para conducir el pin XSHUT. Alternativamente, la palanca de nivel de lógica bidireccional de 4 canales (#2595) puede usarse externamente con esos pines.
| PIN | Descripción |
|---|---|
| VDD | Salida regulada de 2.8 V Casi 150 mA está disponible para alimentar componentes externos. (Si desea omitir el regulador interno, puede usar este pin como entrada para voltajes entre 2.6 V y 3.5 V con VIN desconectado). |
| VIN | Esta es la conexión principal de la fuente de alimentación de 2,6 V a 5,5 V. Los cambiadores de nivel SCL y SDA llevan las líneas I²C a este nivel. |
| GND | La conexión a tierra (0 V) para su fuente de alimentación. Su fuente de control I²C también debe compartir un terreno común con esta placa. |
| SDA | Línea de datos I²C con desplazamiento de nivel: ALTA es VIN, BAJA es 0 V |
| SCL | Línea de reloj I²C con desplazamiento de nivel: ALTA es VIN, BAJA es 0 V |
| XSHUT | Este pin es una entrada de apagado activo-bajo; la placa lo levanta a VDD para habilitar el sensor por defecto. Conducir este pin bajo pone el sensor en modo de espera de hardware. Esta entrada no está desplazada en el nivel. |
| GPIO1 | Salida de interrupción programable (nivel lógico VDD). Esta salida no se cambia de nivel. |
El esquema anterior muestra los componentes adicionales que incorpora la placa portadora para hacer que el VL53L1 sea más fácil de usar, incluido el regulador de voltaje que permite alimentar la placa desde una fuente de 2,6 V a 5,5 V y el circuito de cambio de nivel que permite la comunicación I²C a el mismo nivel de voltaje lógico que VIN. Este esquema también está disponible como PDF descargable (110k pdf).
El VL53L1X se puede configurar y sus lecturas de distancia se pueden consultar a través del bus I²C. Los cambios de nivel en las líneas de reloj I²C (SCL) y datos (SDA) permiten la comunicación I²C con microcontroladores que funcionan con el mismo voltaje que VIN (2.6 V a 5.5 V). Puede encontrar una explicación detallada de la interfaz I²C en el VL53L1X en su hoja de datos (1MB pdf), y la información más detallada acerca de I²C en general se puede encontrar en la especificación I²C-bus de NXP (1MB pdf).
La dirección de esclavo de 7 bits del sensor se establece de manera predeterminada en 0101001b al encenderse. Se puede cambiar a cualquier otro valor escribiendo uno de los registros de configuración del dispositivo, pero la nueva dirección solo se aplica hasta que el sensor se reinicie o apague. ST proporciona una nota de aplicación (196k pdf) que describe cómo utilizar múltiples sensores VL53L0X en el mismo bus I²C al poner individualmente a cada sensor fuera de restablecimiento y asignarle una dirección única, y el enfoque se puede adaptar fácilmente para aplicarlo al VL53L1X. .
La interfaz I²C en el VL53L1X cumple con el estándar de modo rápido I²C (400 kHz). En nuestras pruebas de la placa, pudimos comunicarnos con el chip a frecuencias de reloj de hasta 400 kHz; las frecuencias más altas podrían funcionar pero no fueron probadas.
A diferencia de la información disponible para muchos otros dispositivos, ST no ha publicado públicamente un mapa de registro y descripciones u otra documentación sobre la configuración y el control del VL53L1X. En cambio, la comunicación con el sensor debe hacerse a través de la API VL53L1X de ST (STSW-IMG007), un conjunto de funciones C que se encargan de las interfaces de bajo nivel. Para usar el VL53L1X, puede personalizar la API para que se ejecute en la plataforma de su elección utilizando la información en la documentación de la API. Alternativamente, es posible utilizar el código fuente API como una guía para su propia implementación.
Hemos escrito una biblioteca Arduino básica para el VL53L1X, que se puede utilizar como una alternativa a la API oficial de ST para conectar este sensor con un controlador compatible con Arduino o Arduino. La biblioteca simplifica la configuración del VL53L1X y lee los datos de distancia a través de I²C. También incluye bocetos de ejemplo que le muestran cómo usar la biblioteca.
También tenemos disponible una implementación de la API VL53L1X de ST para Arduino, que incluye un boceto de ejemplo. En comparación con nuestra biblioteca, la API tiene una interfaz más complicada y usa más almacenamiento y memoria, pero ofrece algunas funcionalidades avanzadas que nuestra biblioteca no proporciona y tiene una verificación de errores más robusta. Considere usar la API para aplicaciones avanzadas, especialmente cuando el almacenamiento y la memoria son un problema menor.