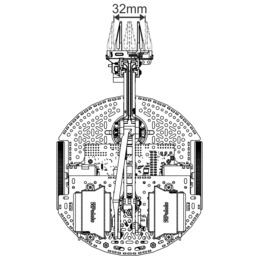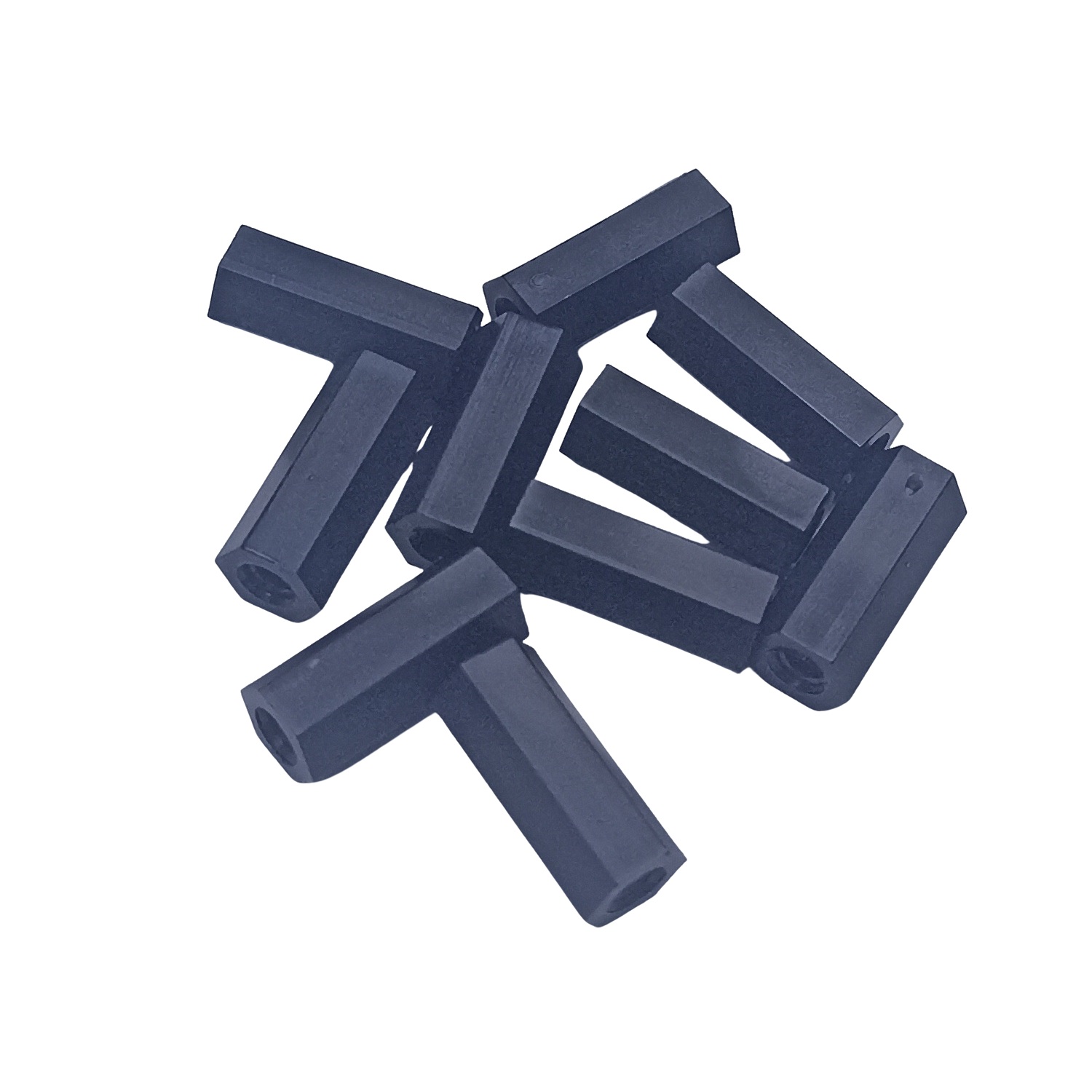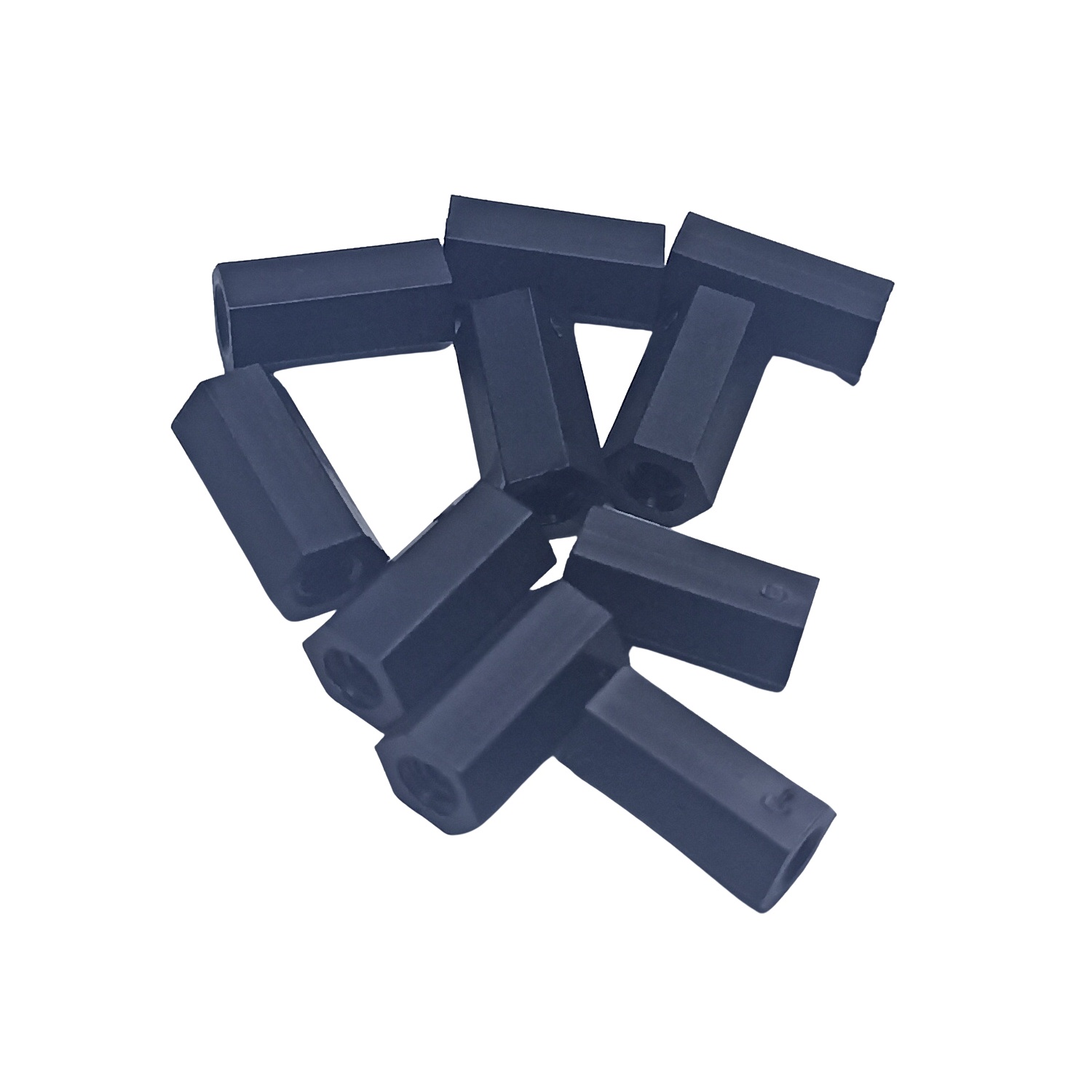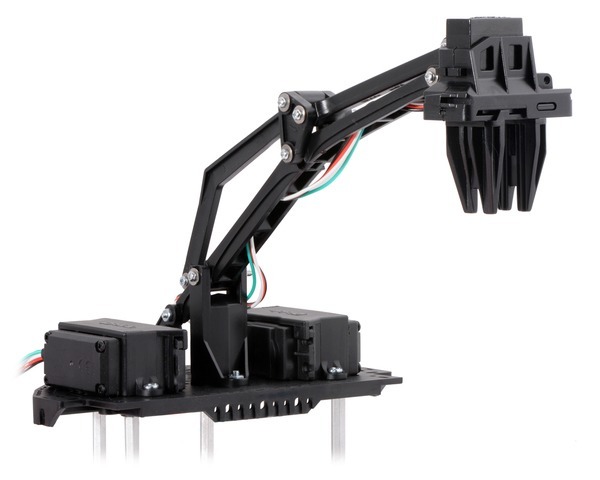
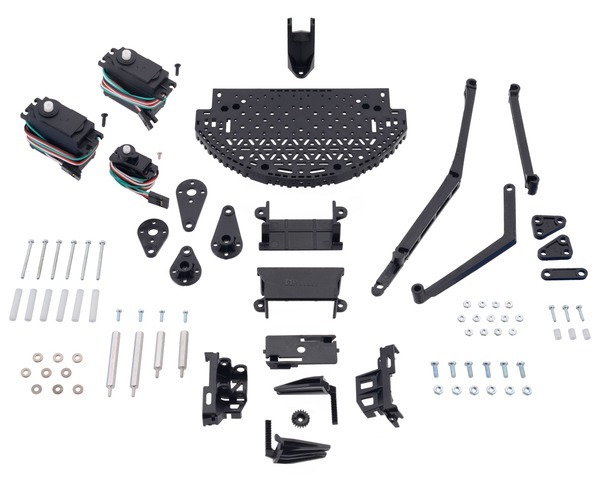

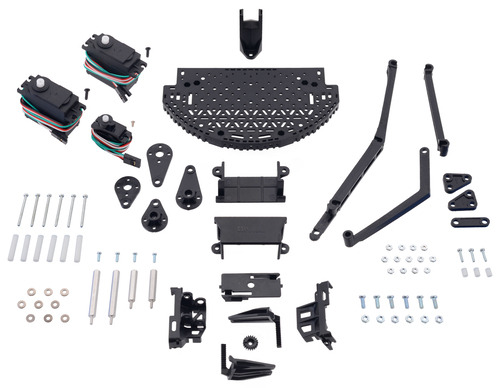
Este brazo robótico es un accesorio para el chasis Romi, le permite manipular objetos pequeños a su alrededor. El kit incluye un micro gripper con paletas que se pueden deslizar hasta 32 mm de distancia, uniones en los brazos para sujetar el gripper y una plataforma para montar todo. El kit está accionado por tres servos incluidos que están especialmente modificados para proporcionar acceso a sus potenciómetros de retroalimentación a través de un cuarto cable (verde), que le permite detectar si algo está interfiriendo con su capacidad para llegar a sus posiciones ordenadas. Esta retroalimentación también permite un control más complejo del brazo desde su controlador principal.
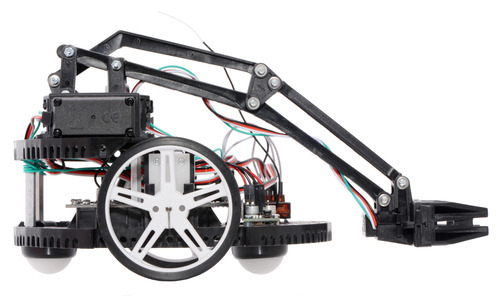 |
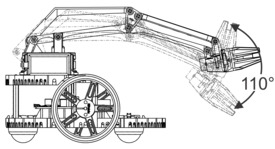
El brazo Romi se monta en la mitad posterior del chasis Romi, justo encima de los motores, utilizando los separadores de aluminio incluidos. Dos servos de tamaño estándar se ajustan en la base del brazo y controlan la altura y el ángulo de inclinación del gripper, mientras que un micro servo se encuentra dentro del gripper para accionar las paletas. Los servos más grandes de elevación e inclinación pueden trazar brevemente hasta alrededor de 1.8A cada uno cuando se les ordena moverse bruscamente, pero el consumo de corriente típico debe ser de 1A cada uno. La corriente de pérdida del servo de la pinza microscópica es de aproximadamente 0.8A a 6V. Los tres servos están diseñados para recibir alimentación de paquetes de baterías de 4.8V a 6V (nominales) o una fuente de alimentación adecuada en ese rango general. Para cada servo, hay una correspondencia aproximada de 1:1 entre la posición del servo en milisegundos y la tensión de realimentación en milivoltios, por lo que, por ejemplo, la tensión de retroalimentación será de alrededor de 1,5V en la posición correspondiente a los impulsos de servo de 1,5ms.
|
El gripper, que puede montarse en el extremo del brazo en orientación horizontal (pala) o vertical (grúa), utiliza un diseño de cremallera y piñón con el engranaje de piñón montado en el servo y bastidores opuestos para mantener las paletas de sujeción sincronizados y paralelos entre sí a lo largo del rango de movimiento.
|
La carga máxima recomendada del brazo es de 3.5 oz (100 g) y el gripper puede abrirse hasta un ancho máximo de 32 mm. Tenga en cuenta que el rango completo de movimiento del servo del gripper requiere pulsos de entre 0,5 ms (completamente abierto) y 2,4 ms (completamente cerrado), lo que supera el rango de servo de hobby estándar de 1ms a 2ms, por lo que debe asegurarse de que la electrónica de control es capaz de generar tales señales si le interesa obtener el rango completo.
Nota: aunque la mayor parte del peso del brazo está ubicado en la parte posterior del chasis, levantar objetos generalmente hará que el Romi se incline hacia delante, por lo que recomendamos encarecidamente agregar una segunda Rueda loca al punto opcional de la bola en el frente del Romi. Puede usar una banda elástica para endurecer la suspensión de esta ruedita si lo desea (consulte la guía del usuario para obtener más información). Para obtener instrucciones de montaje y más detalles sobre el uso del brazo de robot para Romi, consulte el Manual de usuario del Brazo Robótico para Romi.
Estamos trabajando en la electrónica para simplificar la integración de este brazo en su robot Romi, pero no queríamos que se mantuviera liberando el brazo para usuarios ambiciosos con la capacidad de ensamblar sus propios componentes electrónicos para alimentar y controlar el brazo. Por ahora, este accesorio está destinado a usuarios avanzados.
 |