La familia de controladores RoboClaws de Basicmicro son una serie de controladores de motores regenerativos síncronos, versátiles y eficientes. Pueden alimentar motores DC con escobillas y (dependiendo del modelo) pueden operar con tensiones desde 6V hasta 60V y una corriente continua desde 7,5A a 300A. Además, permiten corrientes máximas muy por encima de las clasificaciones continuas máximas. Las versiones «solo» cuentan con un único canal de control para un motor, mientras que las versiones duales (indicadas por un «2x» en sus nombres) ofrecen dos canales para controlar un par de motores.
Todas las tarjetas RoboClaws tienen una interfaz USB que actúa como un puerto serie virtual (COM), lo que permite controlarlos directamente desde una computadora, y cuentan con comandos integrados para controlar la aceleración, desaceleración, distancia, velocidad, detección de corriente, límites de voltaje y más. RoboClaw también admite varios otros modos de interfaz: se puede controlar a través de serie TTL para usar con sistemas integrados, servopulsos RC para uso como control electrónico de velocidad (ESC) controlado por RC o voltajes analógicos para usar con potenciómetros. o joysticks analógicos.
RoboClaw admite automáticamente niveles lógicos de 3.3V o 5V, interruptores de límite de recorrido, interruptores de inicio, interruptores de parada de emergencia, fuentes de alimentación, sistemas de frenado y contactores. Las fuentes de alimentación se pueden utilizar habilitando la función de control de fijación de voltaje incorporada. Un BEC de modo de conmutación incorporado suministra 5VCC a hasta 1.2A o 3A (según el modelo de controlador) para alimentar los dispositivos del usuario.
Las tarjetas RoboClaws pueden funcionar sin retroalimentación para control de velocidad de bucle abierto, o pueden usarse con una variedad de tipos de retroalimentación para control de posición o velocidad de bucle cerrado. Se admiten encoders de cuadratura con hasta 19,6 millones de pulsos por segundo y se pueden ajustar automáticamente mediante Motion Studio, que es una aplicación descargable gratuita. Además, se admite una amplia gama de entradas de sensores, como potenciómetros y encoders absolutos. La funcionalidad de circuito cerrado de RoboClaw crea un control absoluto sobre la velocidad y la dirección independientemente de los cambios de carga.
RoboClaw incorpora varias características de protección que incluyen límites de temperatura, corriente, sobrevoltaje y bajo voltaje. Se proporcionan varias configuraciones definibles por el usuario, como el límite máximo de corriente y los voltajes máximo y mínimo de la batería, para un control más refinado. El controlador utiliza frenado regenerativo, pero se puede configurar con un circuito de fijación de voltaje para limitar el voltaje regenerativo cuando se usa con fuentes de alimentación conmutadas.
Detalles del item #3684:
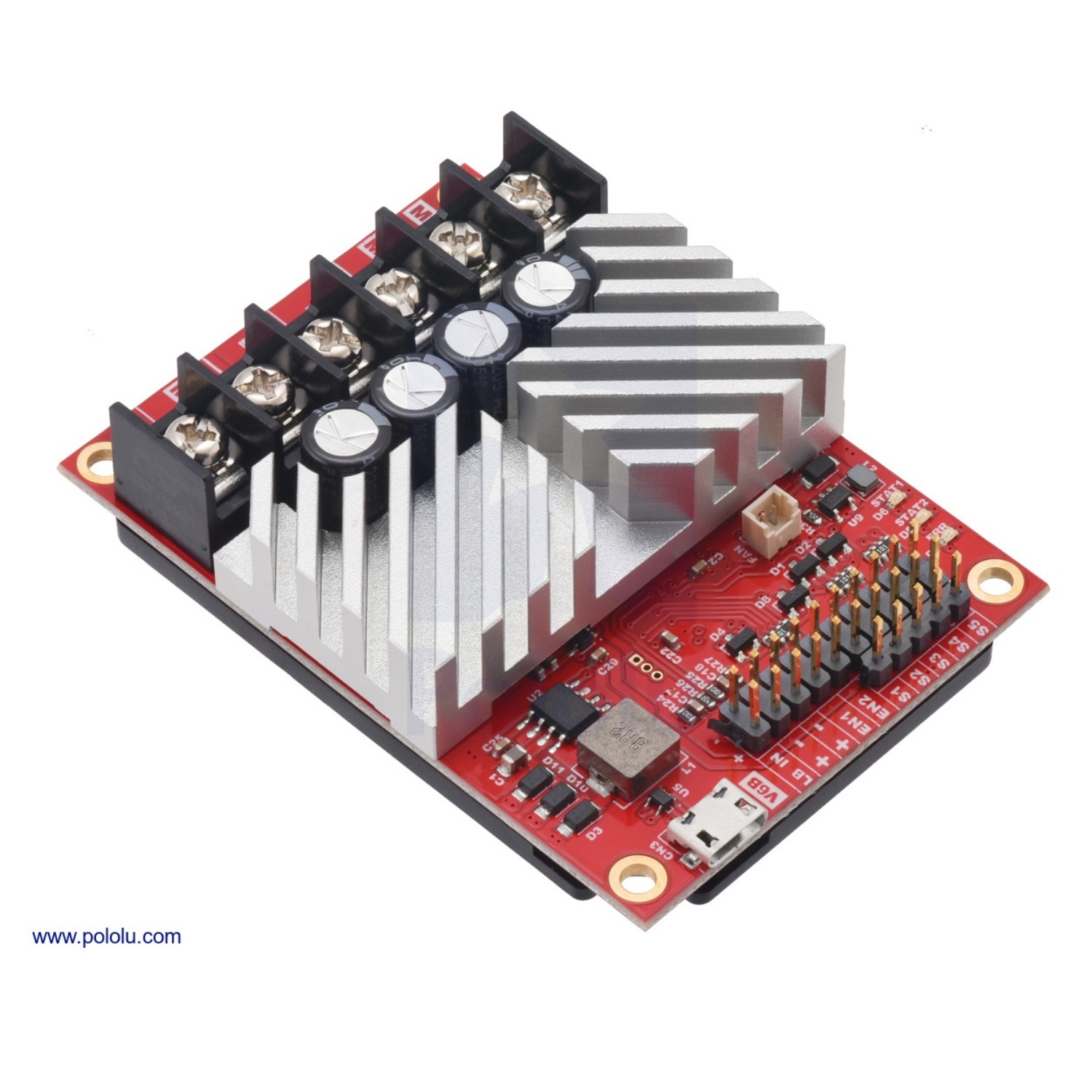
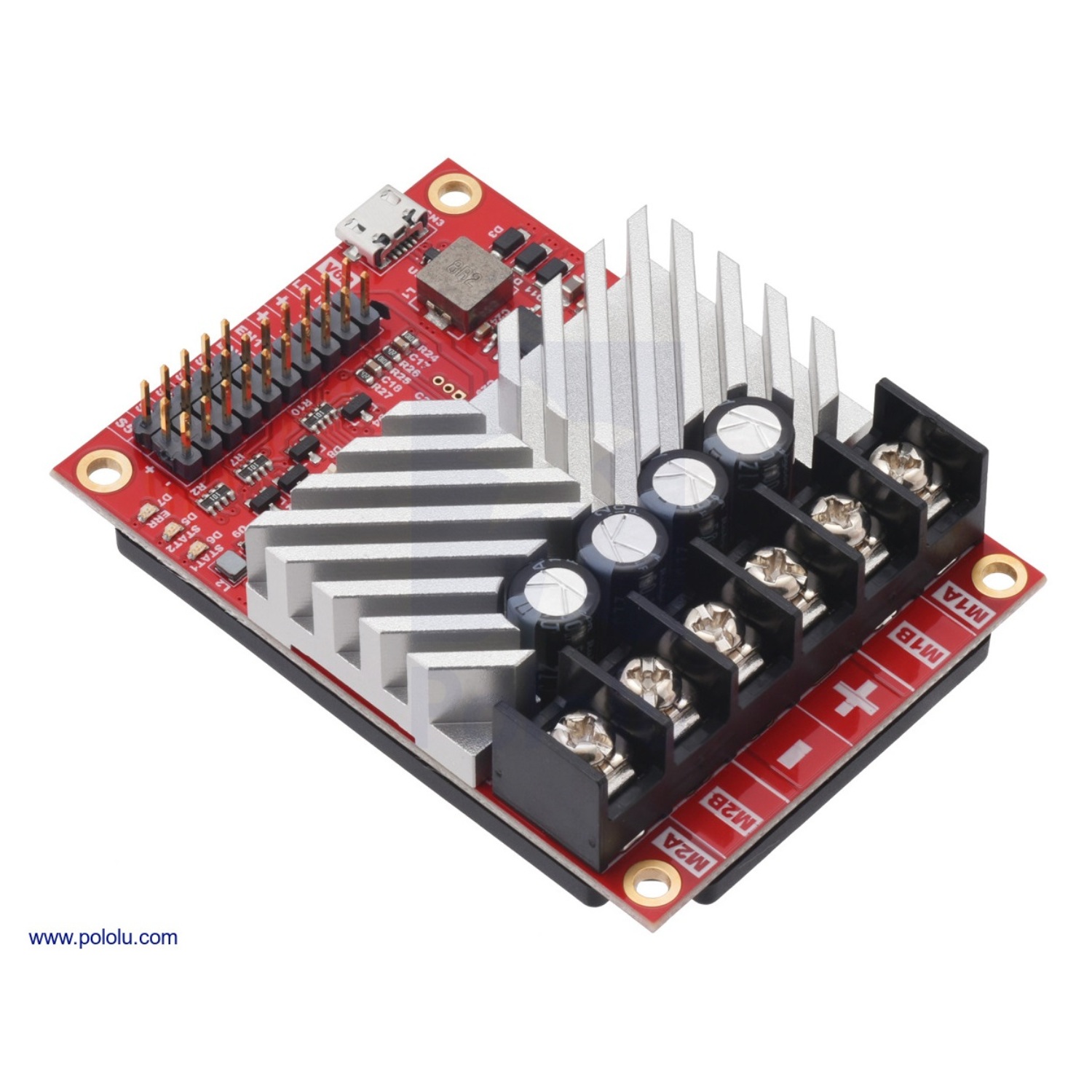
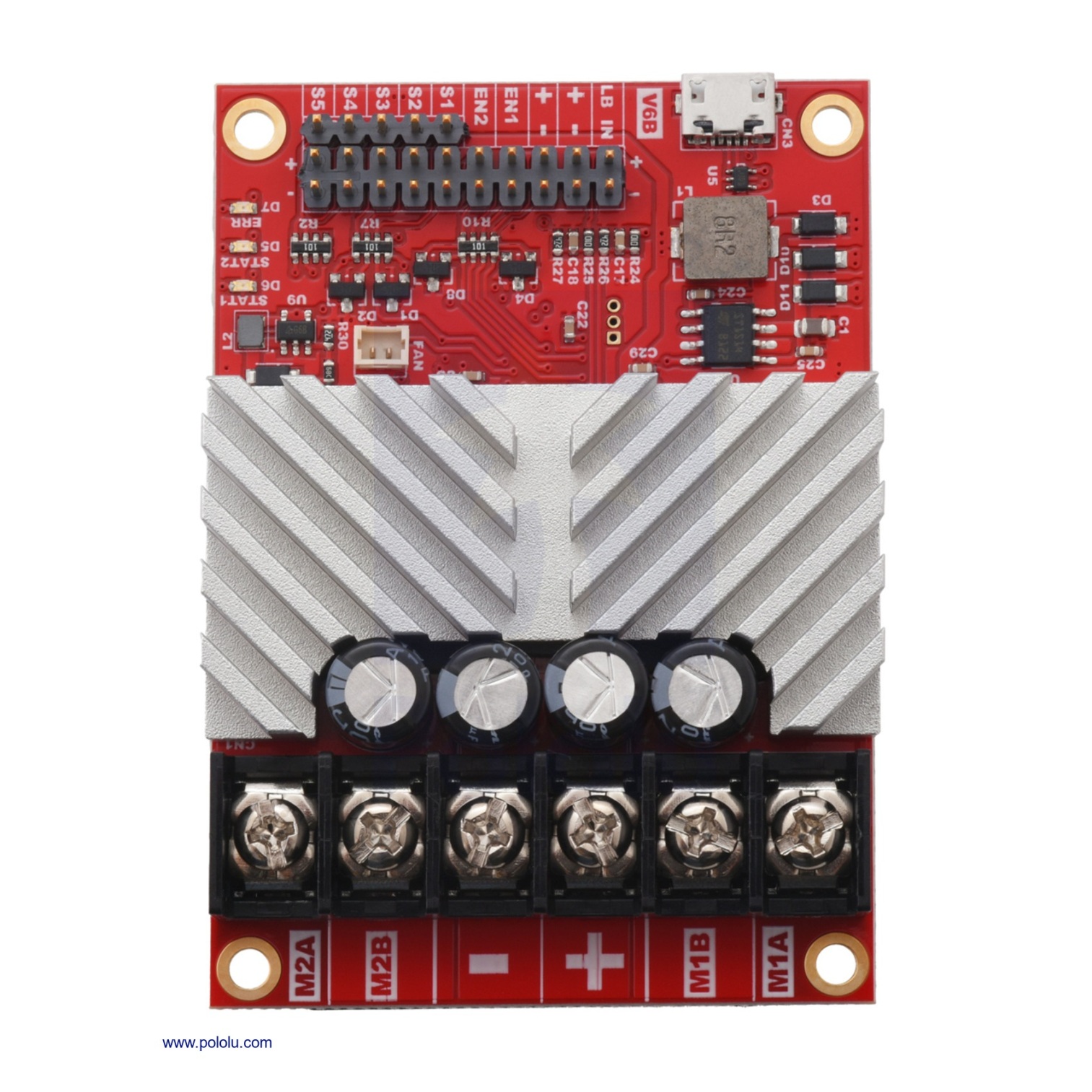
El modelo 2x30A puede suministrar 30A continuos por canal (pico de 60A) a un par de motores de DC y funciona hasta 34V. También cuenta con un conector USB Micro-B para una fácil comunicación a su equipo de cómputo (PC/Laptop).
- Control bidireccional para dos motores DC con escobillas
- Rango de suministro operativo de 6V a 34V
- Salida de corriente continua máxima de 30A
- Los controladores de doble canal admiten puenteo de canales para permitir el control de un solo motor con el doble de capacidad de corriente.
- La limitación automática de corriente reduce el ciclo de trabajo cuando la temperatura supera los 85° C
- Cuatro opciones de comunicación o control:
- Interfaz serie USB (puerto COM virtual)
- Interfaz serie de nivel lógico (TTL) para conexión directa a microcontroladores u otros controladores integrados
- Interfaz de ancho de pulso de control de radio (RC) Hobby para conexión directa a un receptor RC o servocontrolador RC
- Interfaz de voltaje analógico (0 V a 2 V, tolerante a 5 V) para conexión directa a potenciómetros y joysticks analógicos
- Entradas de retroalimentación duales para control de circuito cerrado PID:
- Control de velocidad o posición con codificadores de cuadratura, hasta 19,6 millones de pulsos de codificador por segundo
- Control de posición con codificadores analógicos o potenciómetros
- (También disponible control de bucle abierto sin retroalimentación)
- Terminales de tornillo para conexión/desconexión rápida
- Configurable mediante interfaz de pulsador o conexión USB y software para PC
- Frenado regenerativo
- Tolera cambios de dirección a alta velocidad.
- BEC de 5 V seleccionable por puente
- El monitoreo de la batería y el corte de bajo voltaje protegen las baterías de una descarga excesiva
- Manual de usuario de RoboClaw
Código de muestra
Basicmicro ha escrito una biblioteca Arduino para RoboClaw que facilita la interfaz de estos controladores de motor con un Arduino. La biblioteca viene con varios bocetos de ejemplo que demuestran diferentes métodos de control de RoboClaw. También tienen una nota de aplicación que muestra cómo usar sus bibliotecas para controlar un RoboClaw con un controlador programable A-Star 32U4.
Tabla comparativa de productos:
| Modelo |
Solo 30A |
Solo 60A |
Solo 300A |
2x7A |
2x15A |
2x30A |
|
2x60A |
2x60AHV |
2x200A |
| Canales de motor: |
1
|
1
|
2
|
| Voltaje operativo: |
6V a 34V |
6V a 60V |
6V a 34V |
10.5V a 60V |
| Salida de corriente continua: |
30A |
60A |
300A |
7.5A |
15A |
30A |
45A |
60A |
60A |
200A |
| Salida de corriente pico: |
60A |
120A |
300A |
15A |
30A |
60A |
60A |
120A |
120A |
200A |
| Corriente máxima con BEC 5V: |
1.2A |
1.2A (V5B o superior) |
3A |
1.2A (V7 o superior) |
3A |
| Dimensiones: |
60 × 32.5 × 23.5 mm |
99 × 72.6 × 30 mm |
48 × 42 × 17 mm |
74 × 52 × 17 mm |
100 × 86 × 30 mm |
100 × 86 × 30 mm |
155 × 126 × 50 mm |
| Peso: |
130 g |
340 g |
20 g |
60 g |
300 g |
1200 g |
Nota: Basicmicro era anteriormente conocido como Ion Motion Control y Orion Robotics. Basicmicro utiliza los siguientes nombres y números de productos para los controladores RoboClaw:
- “RoboClaw Solo 30A Motor Controller”, Item Id: ION408/IMC408
- “RoboClaw Solo 60A Motor Controller”, Item Id: ION410/IMC410
- “RoboClaw Solo 300A Motor Controller”, Item Id: IMC406
- “RoboClaw 2x7A Motor Controller”, Item Id: ION404/IMC404 (reemplaza “RoboClaw 2x5A”, Item Id: ION403/IMC403)
- “RoboClaw 2x15A Motor Controller”, Item Id: ION412/IMC412
- “RoboClaw 2x30A Motor Controller”, Item Id: ION413/IMC413
- “RoboClaw 2x45A Motor Controller”, Item Id: ION418/IMC418
- “RoboClaw ST 2x45A Motor Controller”, Item Id: ION419/IMC419
- “RoboClaw 2x60A Motor Controller”, Item Id: ION414/IMC414
- “RoboClaw 2x60AHV Motor Controller”, Item Id: ION415/IMC415
- “RoboClaw 2x160A Motor Controller”, Item Id: ION426/IMC426