$520.00 MXN (IVA Incluido)
5 disponibles
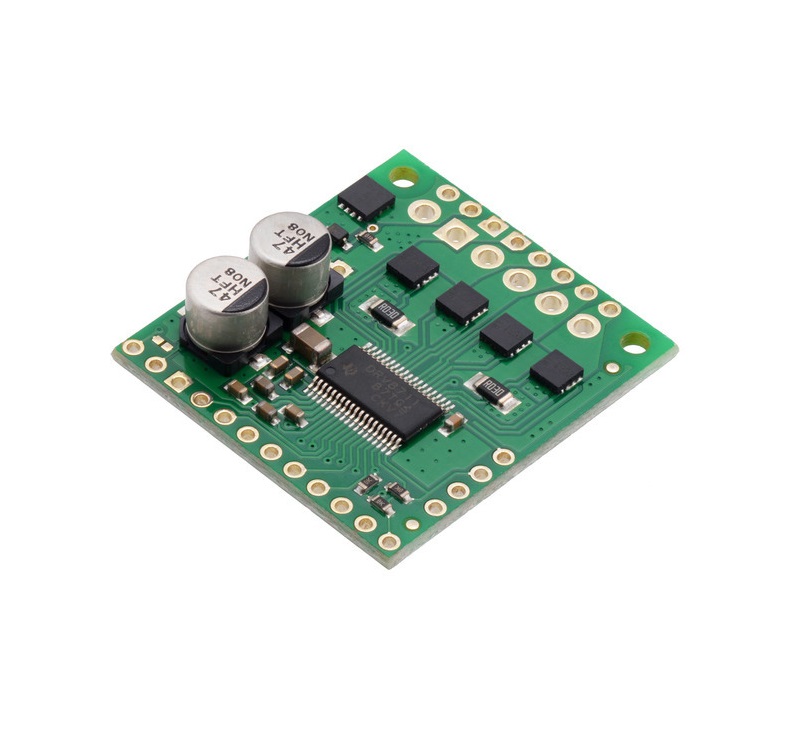
Este controlador discreto MOSFET permite el control de un motor a pasos bipolar. Admite un amplio rango de voltaje de operación de 8V a 50V y puede entregar hasta 4A continuos por fase sin un disipador de calor o flujo de aire forzado (6A máx. Con suficiente refrigeración adicional). La interfaz SPI permite la configuración de la limitación actual, el modo de paso (modos de 9 pasos desde el paso completo hasta el paso de 1/256), el modo de decaimiento y la detección de bloqueo. El controlador también proporciona información de retorno de EMF que se puede usar para controles más avanzados y algoritmos de detección de bloqueo. Las características adicionales incluyen voltaje inverso, bajo voltaje y protección contra sobrecargas.
Localización: D18
| Fabricante | Pololu |
|---|
5 disponibles
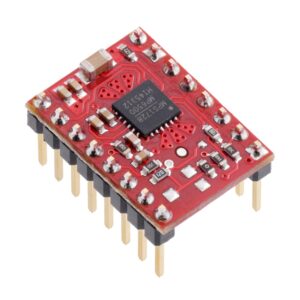
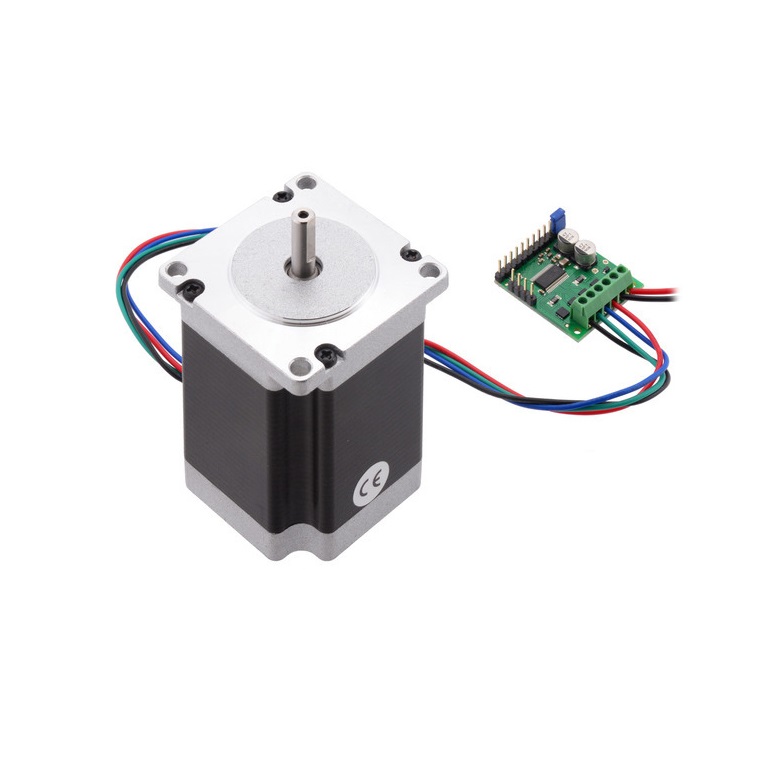
El controlador 36v4 del motor a pasos de alta potencia Pololu combina el IC del controlador del motor paso a paso DRV8711 de Texas Instruments con MOSFET externos para permitir el control de los motores paso a paso bipolares grandes a voltajes operativos de 8 V a 50 V. El DRV8711 tiene muchos ajustes configurables, así que la hoja de datos DRV8711 (3 MB pdf) para una explicación detallada de sus características y cómo usarlas (también tenemos una biblioteca Arduino que simplifica el inicio al proporcionar funciones básicas para configurar y operar el controlador).
El rendimiento de potencia del conductor es una función de los puentes dobles en H externos, que le permiten entregar corrientes continuas de hasta 4 A por fase sin ningún enfriamiento adicional, como disipadores de calor o flujo de aire forzado. (Con suficiente refrigeración adicional, el controlador puede admitir corrientes de hasta 6 A por fase; consulte la sección Consideraciones sobre la disipación de energía a continuación para obtener más información, incluida información importante sobre el uso seguro de este producto).
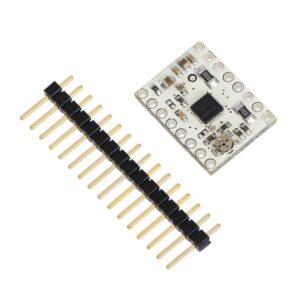
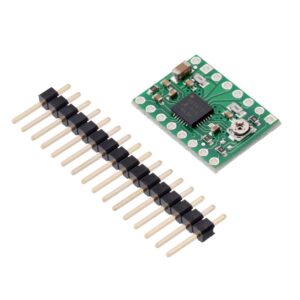
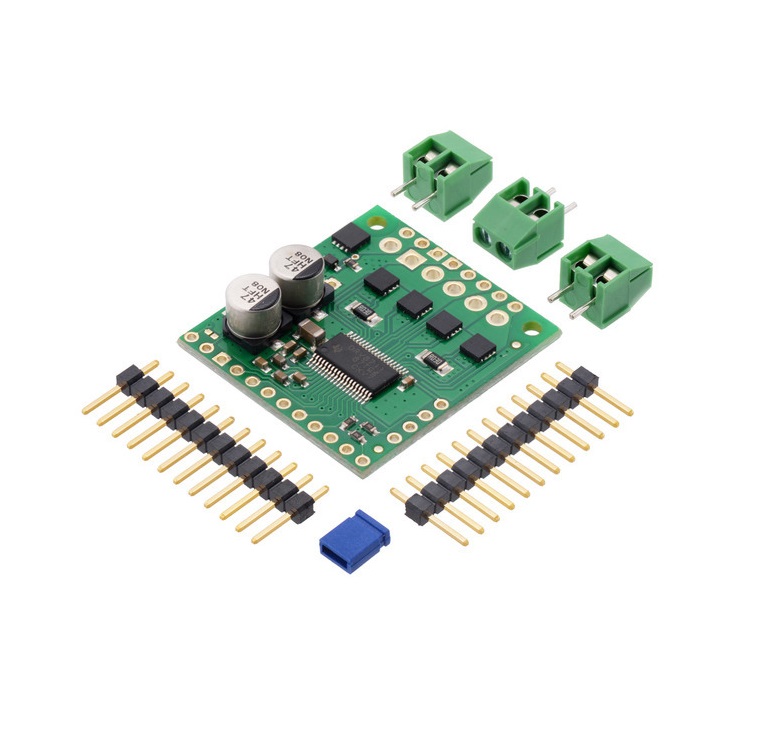
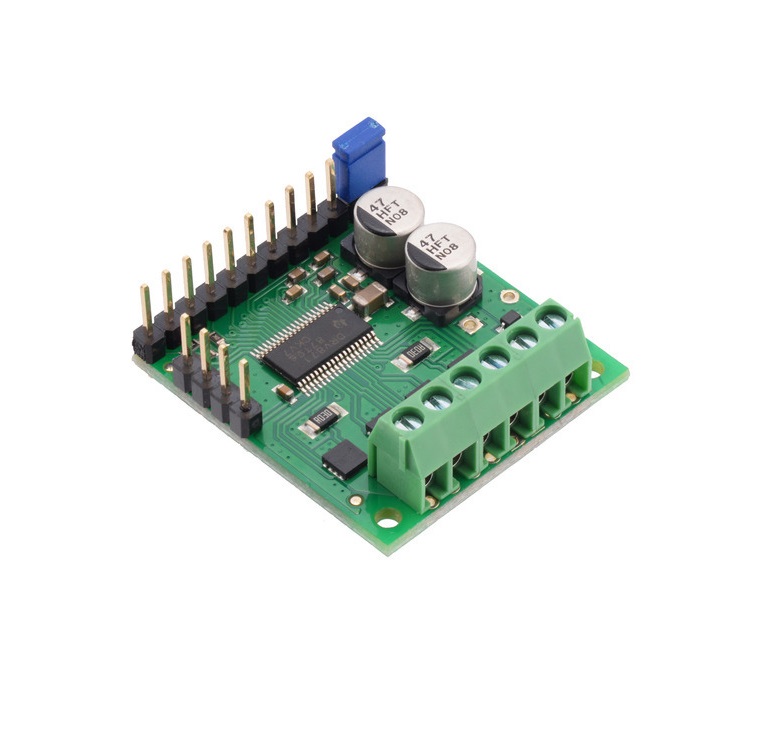
Este producto se envía con todos los componentes de montaje en superficie instalados como se muestra en la imagen del producto. Sin embargo, se requiere soldadura para el ensamblaje de las partes del orificio pasante incluidas. Se incluyen las siguientes partes:
Los cabezales macho de 0.1″ pueden romperse o cortarse en piezas más pequeñas según se desee y soldarse en los orificios pasantes más pequeños. Estos cabezales son compatibles con placas de prueba sin soldadura, conectores hembra de 0.1″ y cables jumper. Los bloques de terminales se pueden soldar en los orificios más grandes para permitir conexiones temporales convenientes de cables de alimentación y de motor sin terminar. También puede soldar los cables de su motor y otras conexiones directamente a la placa para una instalación más compacta.
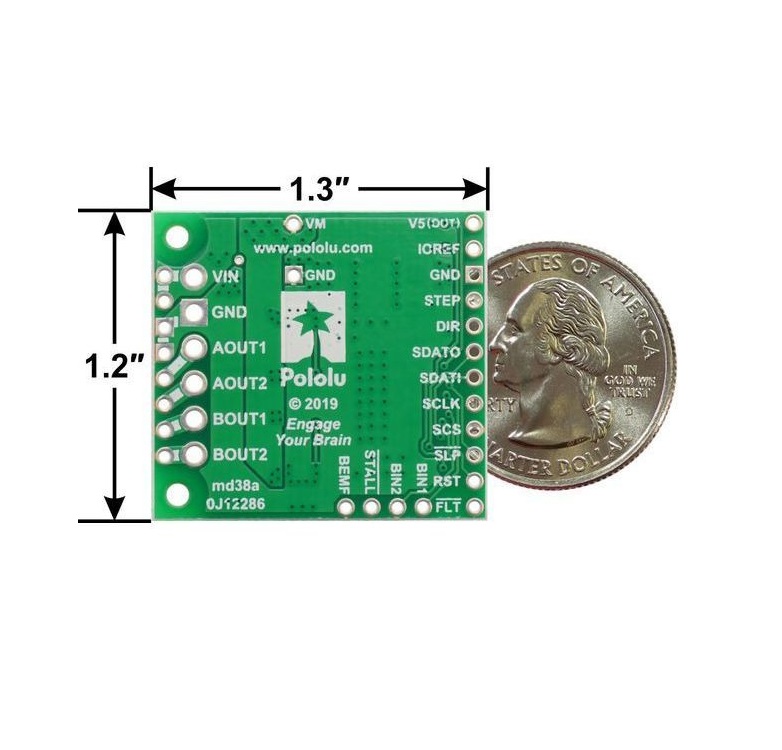
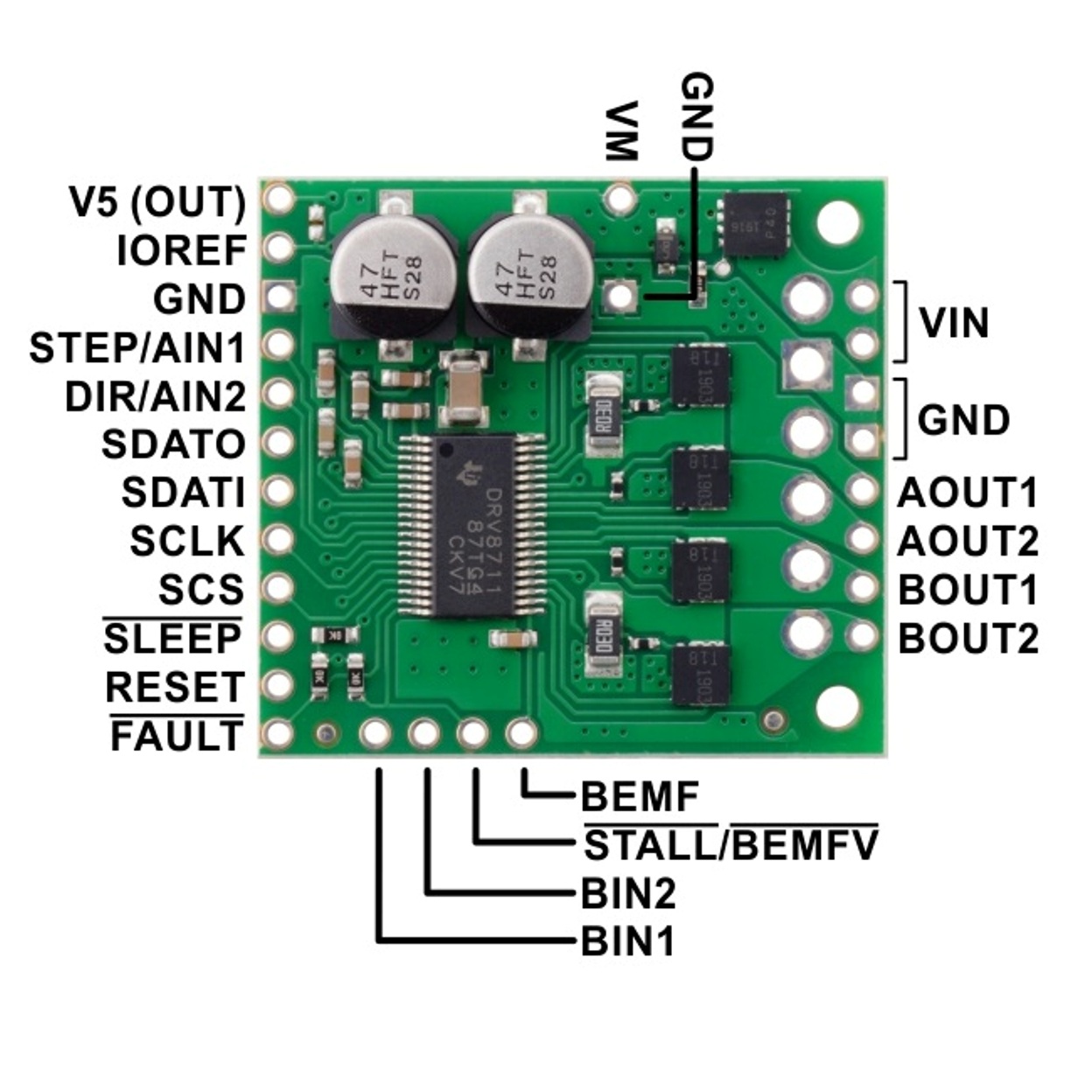
| PIN | Descripción |
|---|---|
| VIN | Conexión de la fuente de alimentación de la placa de 8 V a 50 V (con protección inversa de hasta 40 V). |
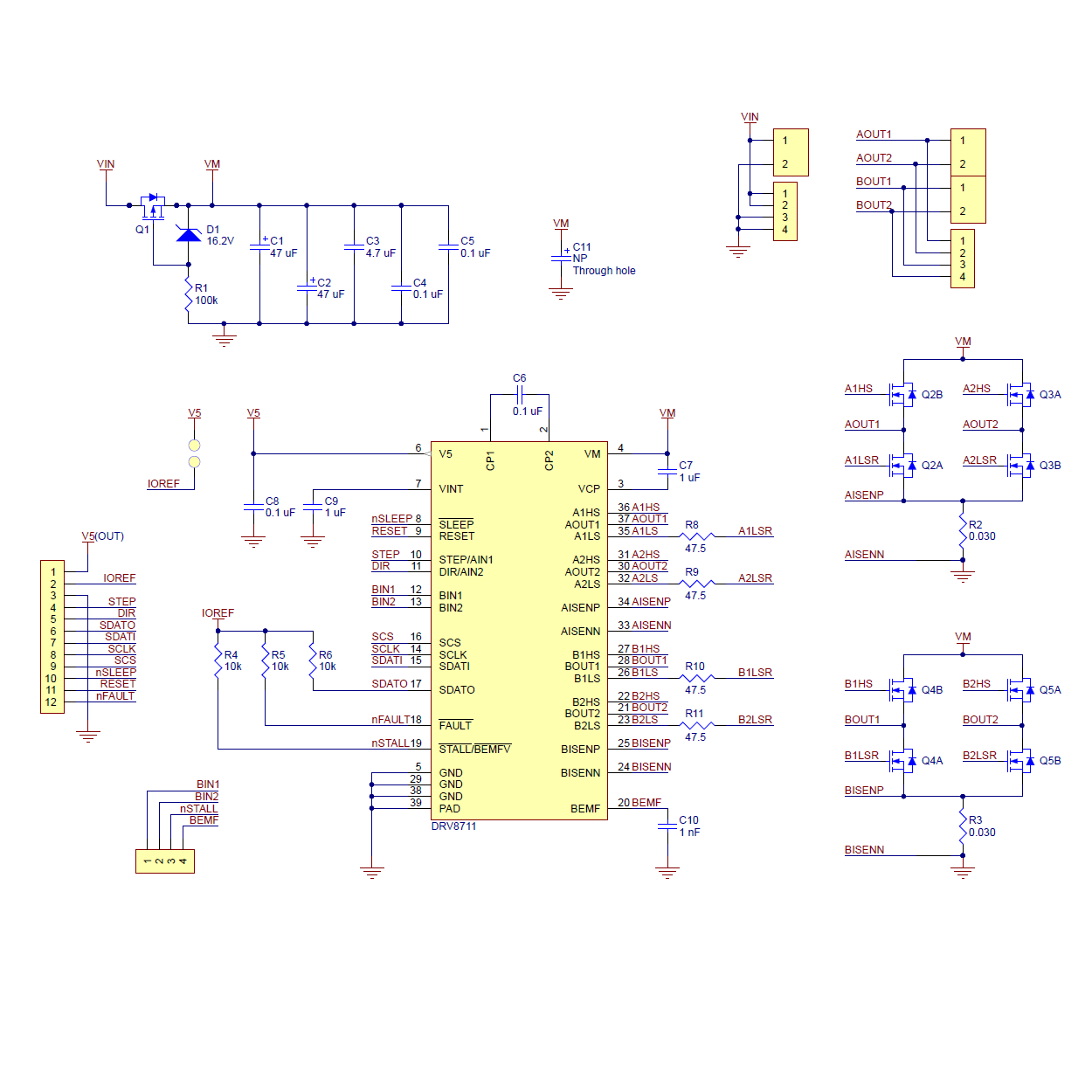
| VM | Este pin da acceso a la fuente de alimentación del motor después del MOSFET de protección de voltaje inverso (consulte el diagrama de la placa en la parte inferior de esta página). Se puede utilizar para suministrar energía con protección inversa a otros componentes del sistema. Este pin también se puede usar con el pin GND adyacente para agregar un condensador electrolítico externo en sistemas donde la capacidad de bypass adicional sería útil. |
| GND | Puntos de conexión a tierra para la fuente de alimentación del motor y referencia a tierra de control. La fuente de control y el controlador del motor deben compartir una tierra común. |
| AOUT1 | Salida del motor: final «positivo» de la bobina A de la fase. |
| AOUT2 | Salida del motor: final «negativo» de la bobina A de la fase. |
| BOUT1 | Salida del motor: final «positivo» de la bobina B de la fase. |
| BOUT2 | Salida del motor: final «negativo» de la bobina B de la fase. |
| V5 (OUT) | Salida regulada de 5V: este pin da acceso al voltaje desde el regulador interno del DRV8711. El regulador solo puede proporcionar hasta 10 mA, por lo que es principalmente útil solo para entradas de la placa de cableado duro y para realizar pull-ups de alimentación para las salidas de drenaje de la placa. Por lo general, no está diseñado para alimentar dispositivos externos. |
| IOREF | Todas las salidas de señal de la placa (excepto BEMF) son salidas de drenaje abierto que se elevan a IOREF, por lo que este pin debe suministrarse con la tensión lógica del sistema de control (por ejemplo, 3.3 V para uso en sistemas de 3.3 V). Para mayor comodidad, se puede conectar al pin V5 (OUT) contiguo cuando se usa en un sistema de 5V. |
| STEP/AIN1 | Los cambios en esta entrada mueven la corriente del motor un paso hacia arriba o hacia abajo en la tabla del traductor (incluso cuando el motor está desactivado). Los pasos también se pueden controlar a través de la interfaz SPI, por lo que este pin es opcional. En el modo PWM externo, este pin funciona como AIN1 en lugar de STEP y controla directamente el estado de la salida AOUT1. |
| DIR/AIN2 | Entrada que determina la dirección de giro del motor paso a paso. La dirección también se puede controlar a través de la interfaz SPI, por lo que este pin es opcional. En el modo PWM externo, este pin funciona como AIN2 en lugar de DIR y controla directamente el estado de la salida AOUT2. |
| SDATO | Salida de datos SPI. (Este pin también se conoce a menudo como «MISO».) Este pin es una salida de drenaje abierto y se tira hacia IOREF en la placa. |
| SDATI | Entrada de datos SPI. (Este pin también se conoce a menudo como «MOSI».) |
| SCLK | Entrada de reloj SPI. |
| SCS | Entrada de selección de chip SPI. Se requieren transiciones lógicas en este pin para la comunicación SPI, incluso si este es el único dispositivo en el bus SPI. |
| SLEEP | De manera predeterminada, el controlador baja este pin, lo que lo pone en un modo de suspensión de baja potencia donde el circuito del controlador del motor está desactivado y todos los circuitos analógicos se colocan en un estado de baja potencia. Los circuitos digitales aún funcionan en modo de suspensión, por lo que aún se puede acceder a los registros del dispositivo a través de la interfaz en serie. Este pin debe ser alto para permitir el dispositivo. |
| RESET | Entrada de reinicio del chip. Una lógica alta en esta entrada restablece toda la lógica interna, incluidos los registros del indexador y del dispositivo, y desactiva las salidas del controlador. Nota: el pin RESTAURAR no funciona mientras el dispositivo está en modo de suspensión. |
| FAULT | Salida de drenaje abierto que baja cuando hay un fallo por sobrecorriente, pre-controlador, sobrecalentamiento o bajo voltaje. Este pin se coloca en IOREF, por lo que es alto por defecto. |
| BIN1 | En el modo PWM externo, BIN1 controla directamente el estado de la salida BOUT1. Este pin no se usa en el modo de indexador (es decir, cuando se usa este dispositivo como un controlador de motor paso a paso). |
| BIN2 | En el modo PWM externo, BIN2 controla directamente el estado de la salida BOUT2. Este pin no se usa en el modo de indexador (es decir, cuando se usa este dispositivo como un controlador de motor paso a paso). |
| STALL/BEMFV | Salida de drenaje abierto que se eleva hasta IOREF en el tablero. En el modo de detección de bloqueo interno, la salida baja cuando se detecta un bloqueo. En el modo de detección de bloqueo externo, la salida baja cuando está disponible una medición EMF de retorno válida. |
| BEMF | Salida analógica que representa el motor de retorno EMF. La señal en este pin puede procesarse aún más mediante un microcontrolador para implementar controles más avanzados y algoritmos de detección de bloqueo. |
Para obtener más información acerca de estos pines, consulte la hoja de datos de DRV8711 (3MB pdf).
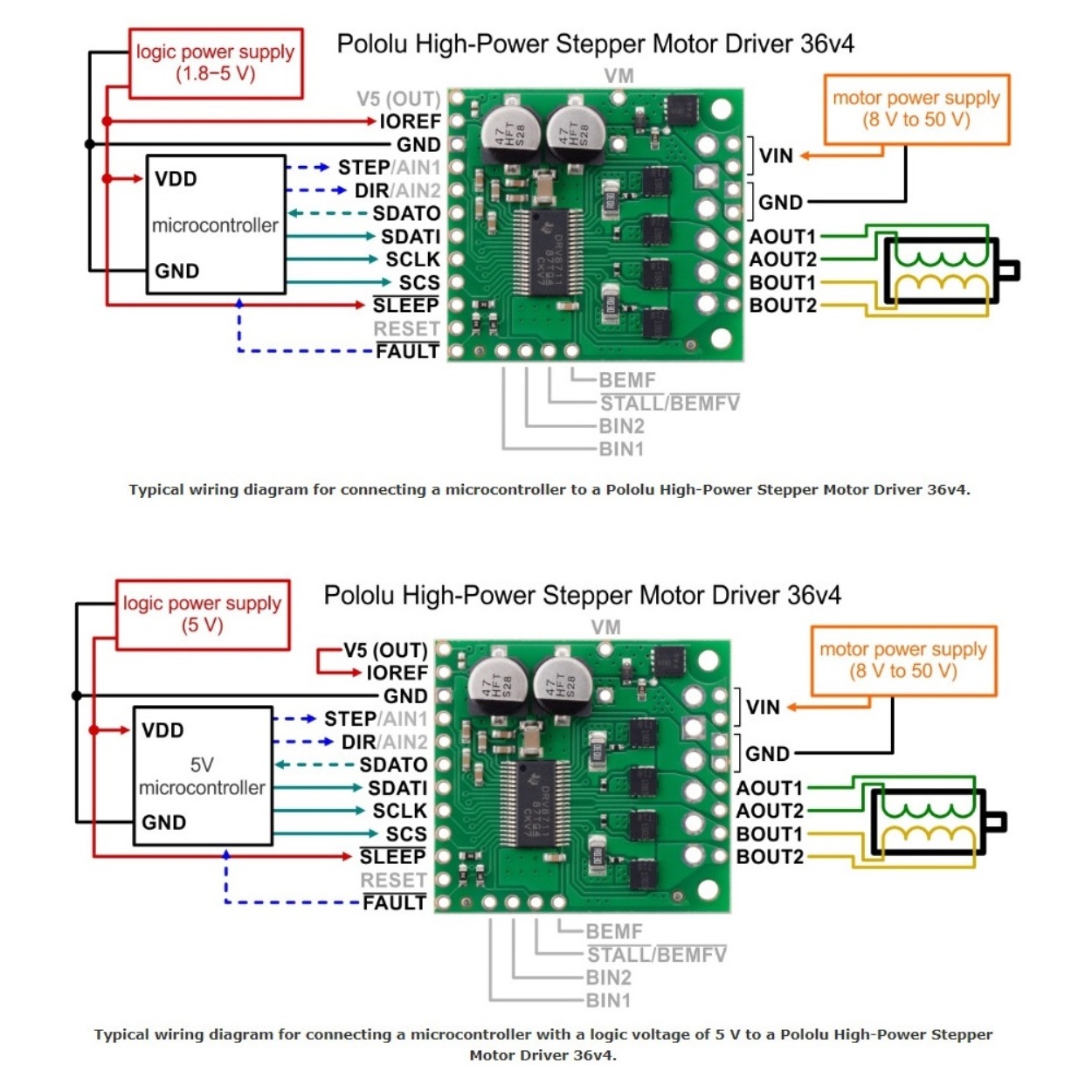
Si bien el controlador de motor de pasos de alta potencia 36v4 permite el control de un motor de pasos a través de una sencilla interfaz de pasos y direcciones, primero debe habilitarse y configurarse a través de su interfaz SPI. Esto significa que el microcontrolador de control debe ser capaz de actuar como maestro SPI (ya sea con un periférico SPI o software SPI), y debe estar conectado a los pines SDATI, SCLK y SCS. Si bien los pines SDATO y FAULT no están obligados a usar este controlador, generalmente es una buena práctica usarlos para monitorear las condiciones de error.
El controlador de motor de pasos de alta potencia 36v4 tiene un regulador interno de 5 V que se puede usar para suministrar IOREF en los casos en que la placa se usa en sistemas de 5 V. Ofrecemos un bloque de cortocircuito para conectar V5 a IOREF, o para una conexión más compacta, puede puentear el puente de montaje en superficie ubicado junto a esos pines (resaltado en la imagen de abajo).
Hemos escrito una biblioteca de controladores de motor a pasos de alta potencia para Arduino que proporciona funciones básicas para configurar y operar el controlador utilizando un controlador compatible con Arduino (original o compatible). La biblioteca incluye varios bocetos de ejemplo.
El controlador de motor de pasos de alta potencia 36v4 puede entregar hasta 4 A continuos por fase en condiciones típicas, pero la corriente real que puede entregar dependerá de qué tan bien pueda mantener el módulo fresco. La placa de circuito impreso del controlador está diseñada para extraer calor de los MOSFET, pero el rendimiento puede mejorarse agregando un disipador de calor o un flujo de aire forzado. (A la inversa, el rendimiento se reducirá en las aplicaciones que limitan la disipación de calor, como las altas temperaturas ambientales o el funcionamiento en recintos.) Con una refrigeración adicional suficiente, el controlador puede entregar hasta 6 A por fase antes de exceder la potencia nominal de 1 W de los 30 mΩ resistencias de sentido actuales.
Advertencia: este controlador de motor no tiene un apagado significativo por exceso de temperatura (mientras que el DRV8711 IC tiene protección por exceso de temperatura, son los MOSFET externos los que se sobrecalentarán primero). Una condición de sobrecalentamiento puede causar daños permanentes al motor. Le recomendamos encarecidamente que no aumente la configuración del límite de corriente más allá de 4 A (o inferior en aplicaciones con disipación de calor reducida) a menos que primero pueda confirmar que la temperatura de los MOSFET se mantendrá por debajo de 140 ° C.
Nota: cuando el controlador se enciende, la configuración del límite actual se establece de manera predeterminada en el máximo (~ 18 A). ¡Asegúrese de configurarlo en algo apropiado tanto para su motor paso a paso como para el conductor antes de activar las salidas!
Este producto puede calentarse lo suficiente como para provocar quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
El límite de corriente del controlador se establece a través de su interfaz SPI. Puede confirmar que lo ha configurado correctamente utilizando un multímetro para medir la corriente real a través de una de las bobinas mientras el motor a pasos está en modo de paso completo y no paso a paso. La corriente que mida de esta manera será aproximadamente el 70% del límite establecido. Tenga en cuenta que medir el consumo de corriente en la fuente de alimentación generalmente no proporcionará una medida precisa de la corriente de la bobina. Como el voltaje de entrada al controlador puede ser significativamente más alto que el voltaje de la bobina, la corriente medida en la fuente de alimentación puede ser un poco más baja que la corriente de la bobina (el controlador y la bobina actúan básicamente como una fuente de alimentación de conmutación descendente). Además, si la tensión de alimentación es muy alta en comparación con lo que necesita el motor para alcanzar la corriente establecida, el ciclo de trabajo será muy bajo, lo que también conduce a diferencias significativas entre las corrientes promedio y RMS.