Encoder Magnético Para Micromotores Con Eje Extendido – con Conector Lateral (Par)
$250.00 MXN (IVA Incluido)
Sin existencias
Código De Producto: 4761
Con este kit puede agregar encoders de cuadratura a sus micromotorreductores con eje extendido, utiliza un disco magnético y sensores de efecto hall para proporcionar 12 cuentas por revolución del eje de su motor. Los sensores funcionan de 2.7 V a 18 V y proporcionan salidas digitales que pueden conectarse directamente a un microcontrolador u otro circuito digital. Estos encoders son compatibles con todos los micro motorreductores Pololu, incluyendo las versiones HPCB. Esta versión cuenta con un conector lateral.
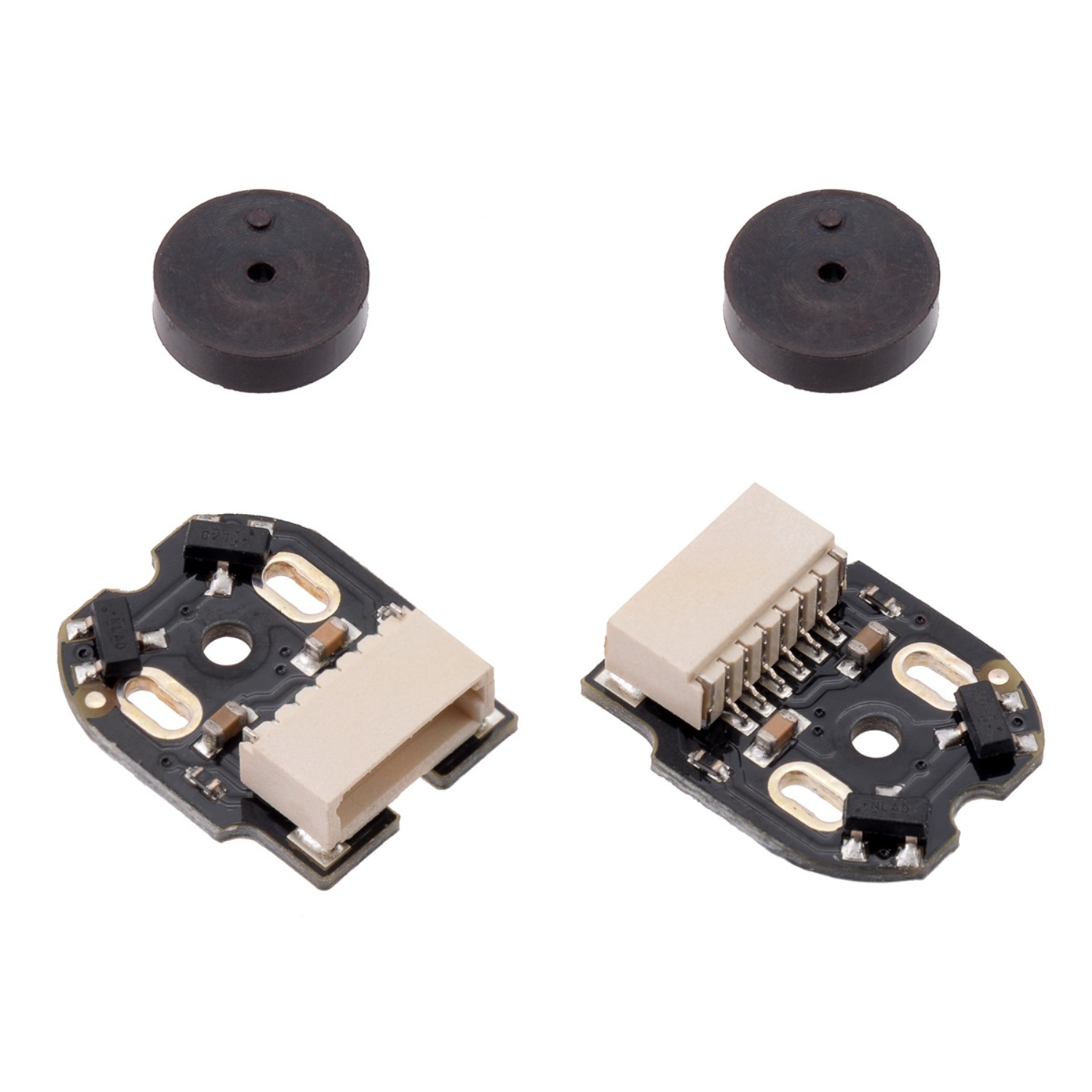
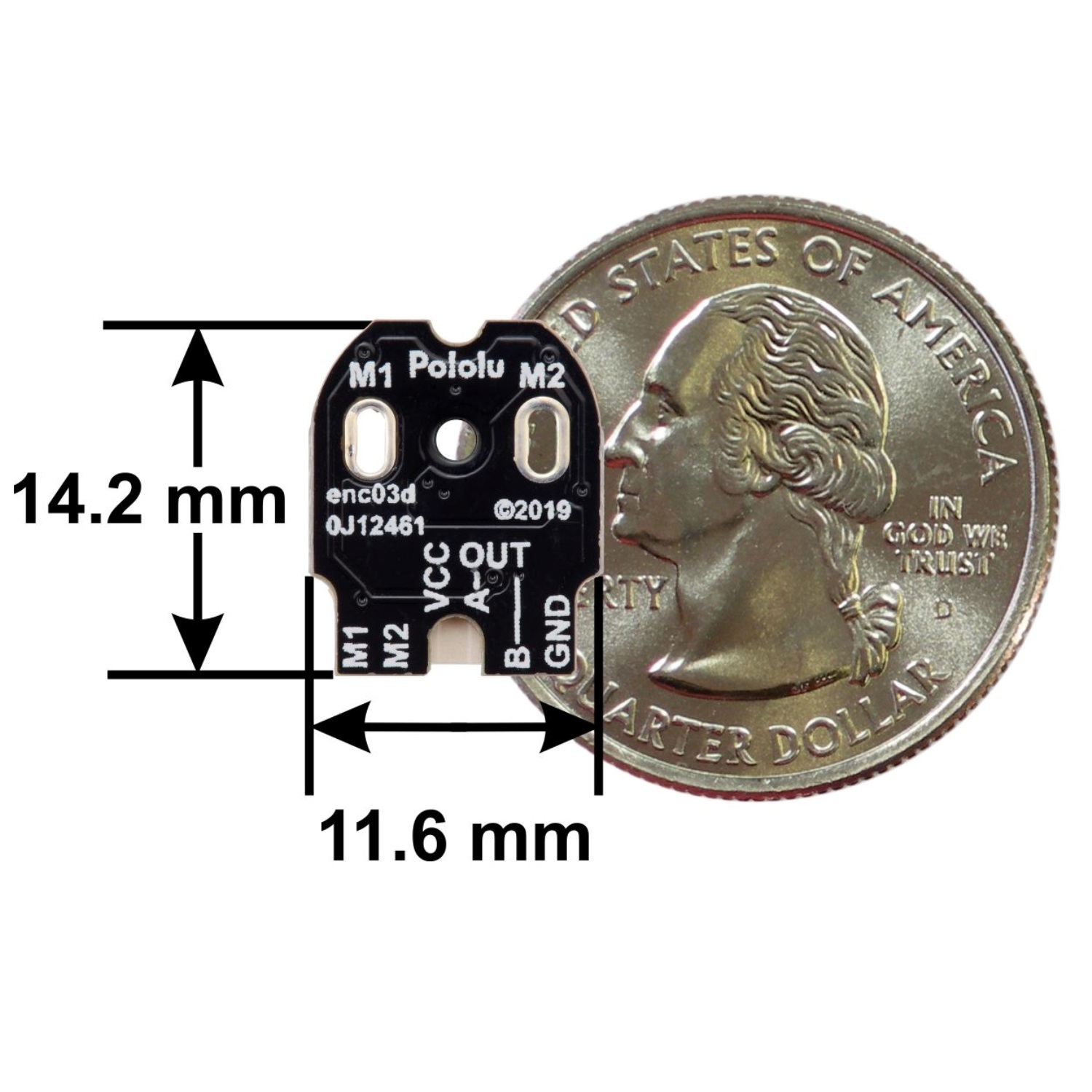
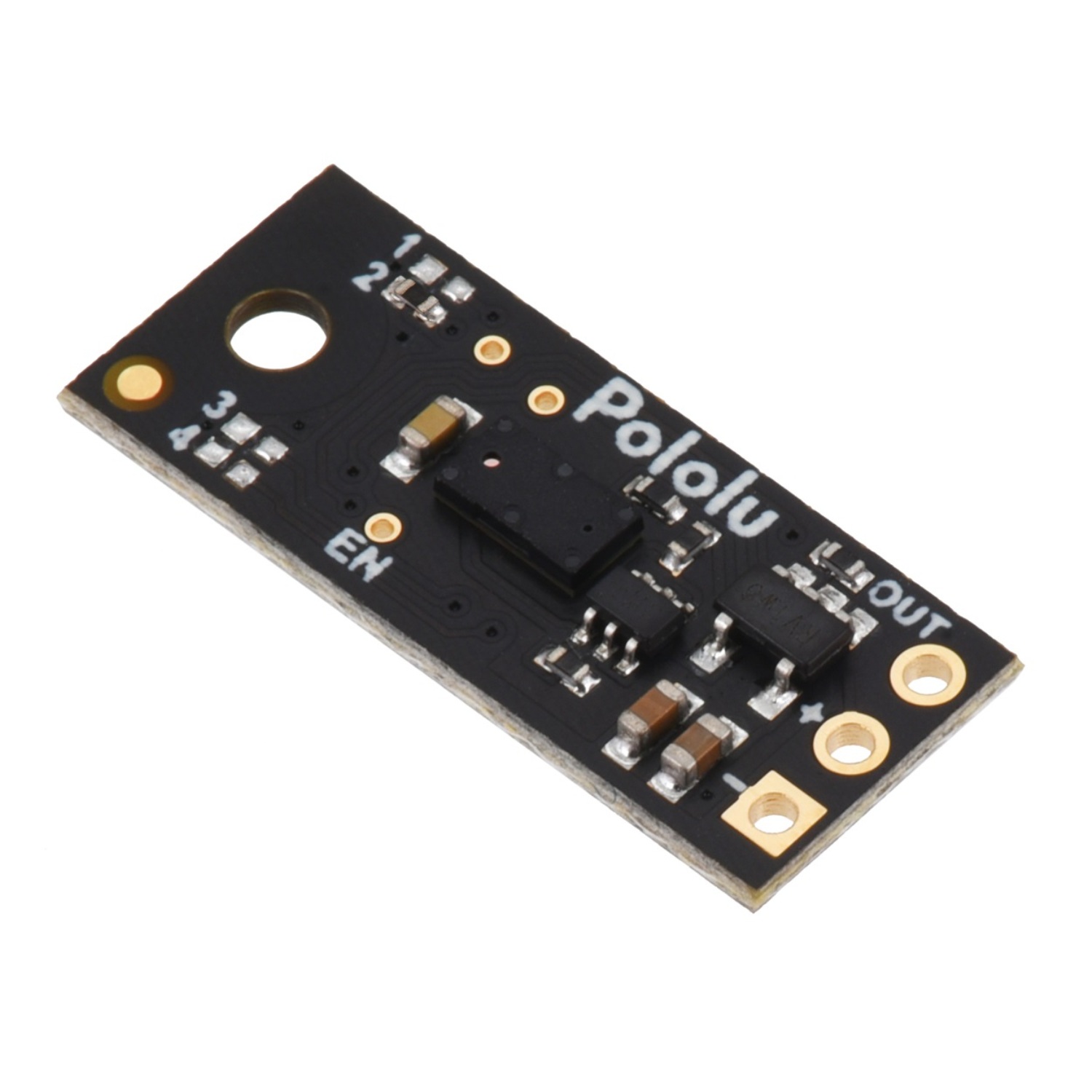
Este kit incluye dos placas con sensor de efecto Hall de doble canal y dos discos magnéticos de 6 polos que se pueden usar para agregar encoders encuadratura a sus micro motorreductores con eje extendido (no incluidos). El encoder detecta la rotación del disco magnético y proporciona una resolución de 12 conteos por revolución del eje del motor al contar los bordes de ambos canales. Para calcular los conteos por revolución del eje de salida de la caja reductora, multiplique la relación de engranajes por 12. Esta solución compacta del encoder se ajusta dentro de la sección transversal de 12 mm × 10 mm de los motores en tres de los cuatro lados, y se extiende 2.8 mm más allá del borde del cuarto lado. A diferencia de la versión anterior cuenta con un conector para facilitar el uso de estos encoders a través de un conector JST SH.
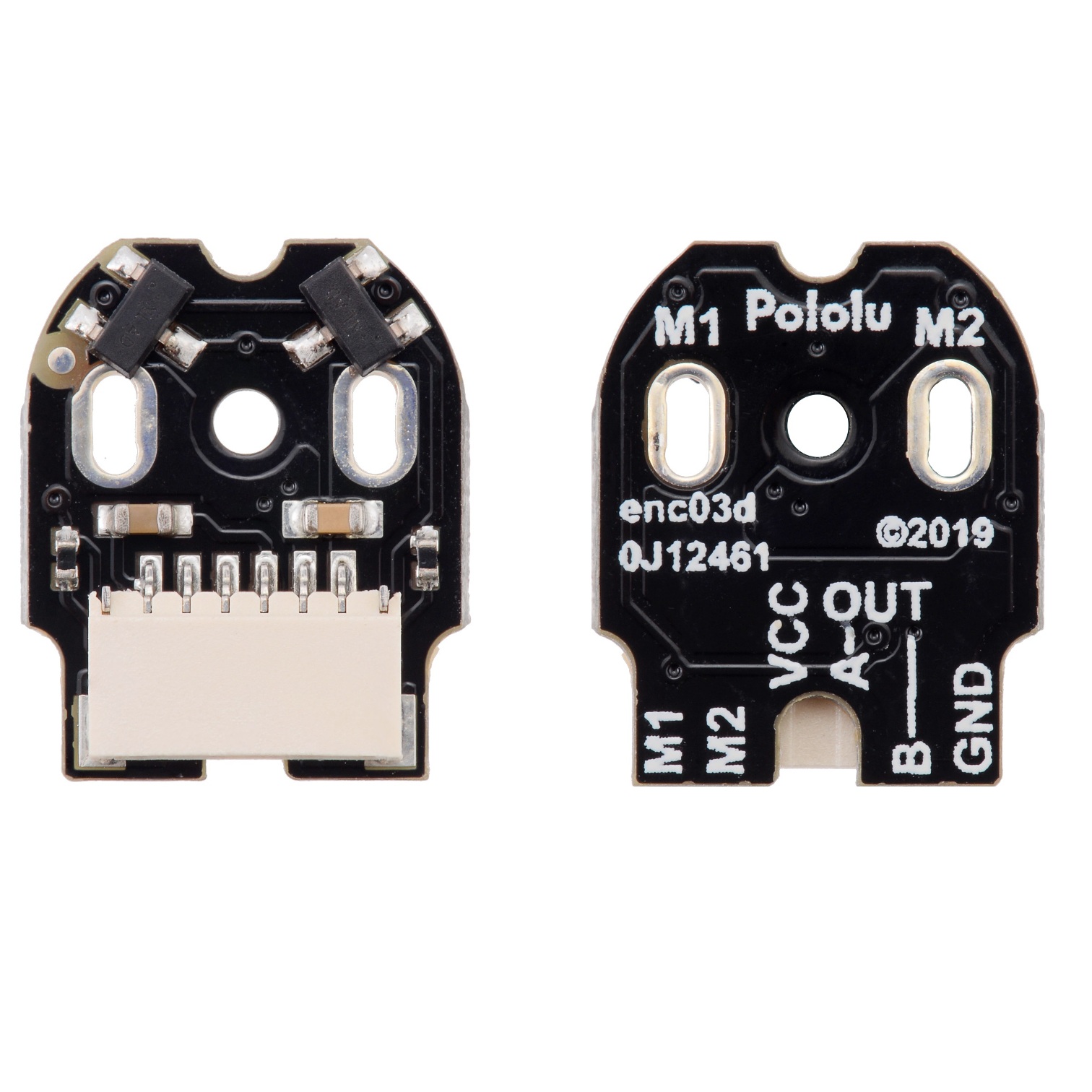
Pinout e instalación:
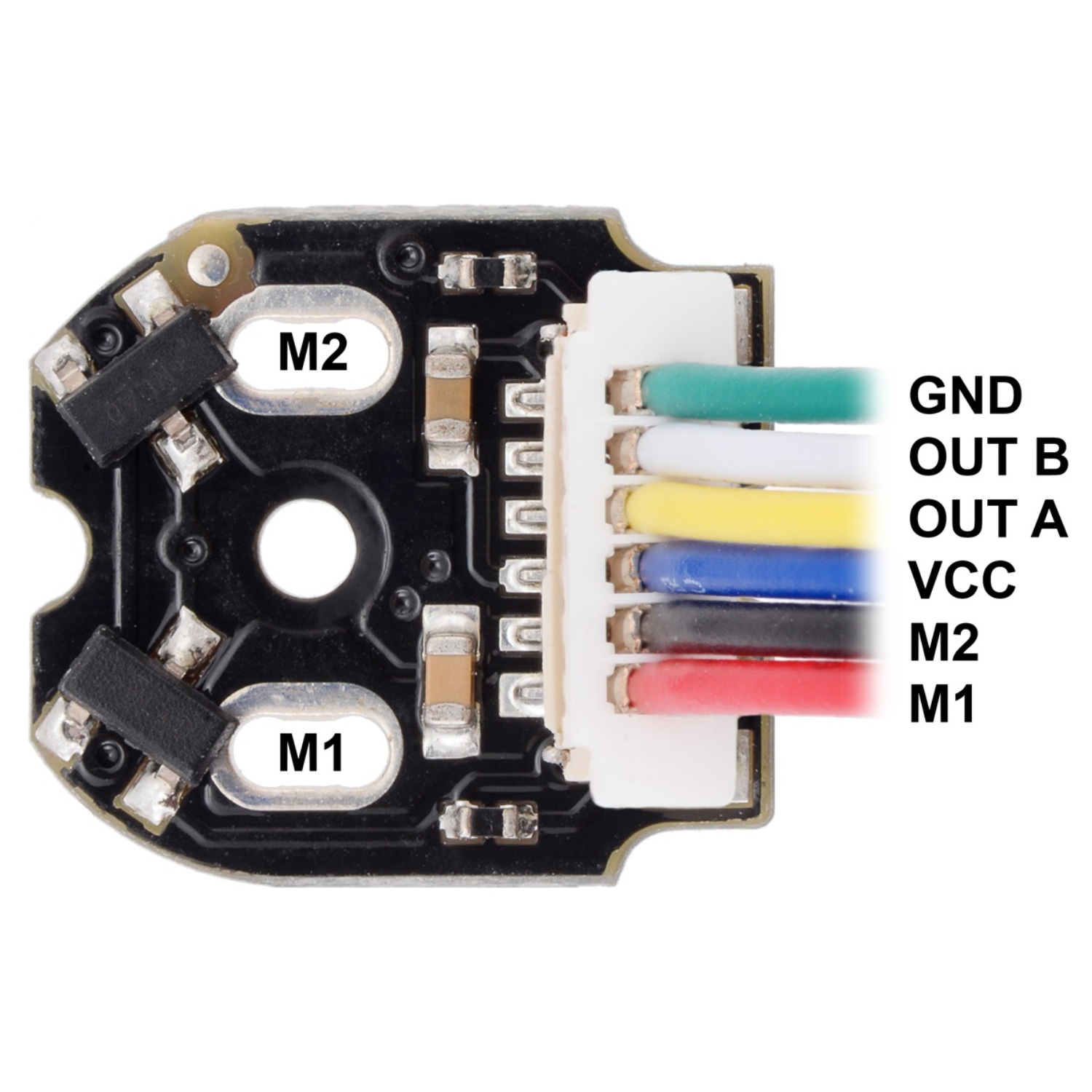
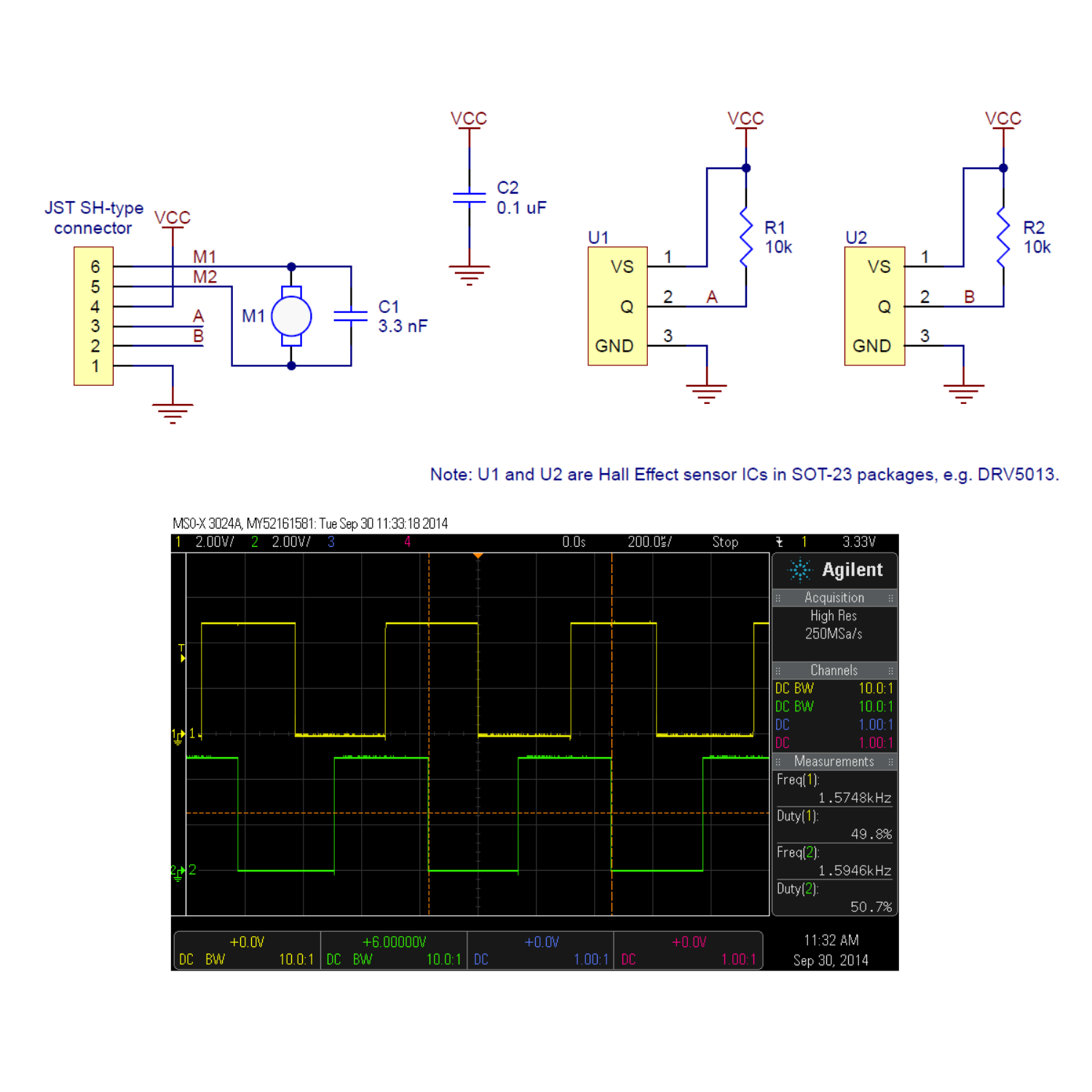
La placa del encoder está diseñada para soldarse directamente a la parte donde se encuentra el eje extendido del motor sobresaliendo a través del orificio en el medio de la placa de circuito. Una forma de lograr una buena alineación entre la placa y el motor es sujetar la placa a un pin del motor y soldar el otro pin solo cuando la placa está plana y bien alineada. Tenga cuidado de evitar el calentamiento prolongado de los pines del motor, que podrían deformar la tapa de plástico o los cepillos del motor. Una vez que la placa se suelda a los dos terminales, los cables del motor se conectan a los pines del conector M1 y M2 como se indica a continuación, y se puede acceder a ellos a través de los cables rojo y negro cuando se usan con los cables JST correspondientes. Los cuatro pines restantes del conector se utilizan para alimentar los sensores y acceder a las dos salidas en cuadratura:
Los sensores se alimentan a través de los pines VCC (cable azul) y GND (cable verde). El VCC puede ser de 2.7 V a 18 V, y las salidas en cuadratura A y B (cables amarillo y blanco) son señales digitales que son impulsadas a baja (0 V) por los sensores o arrastradas a VCC a través de resistencias pull-up de 10 kΩ, dependiendo en el campo magnético aplicado. Los comparadores de los sensores tienen histéresis incorporada, lo que evita las señales espurias en los casos en que el motor se detiene cerca de un punto de transición.