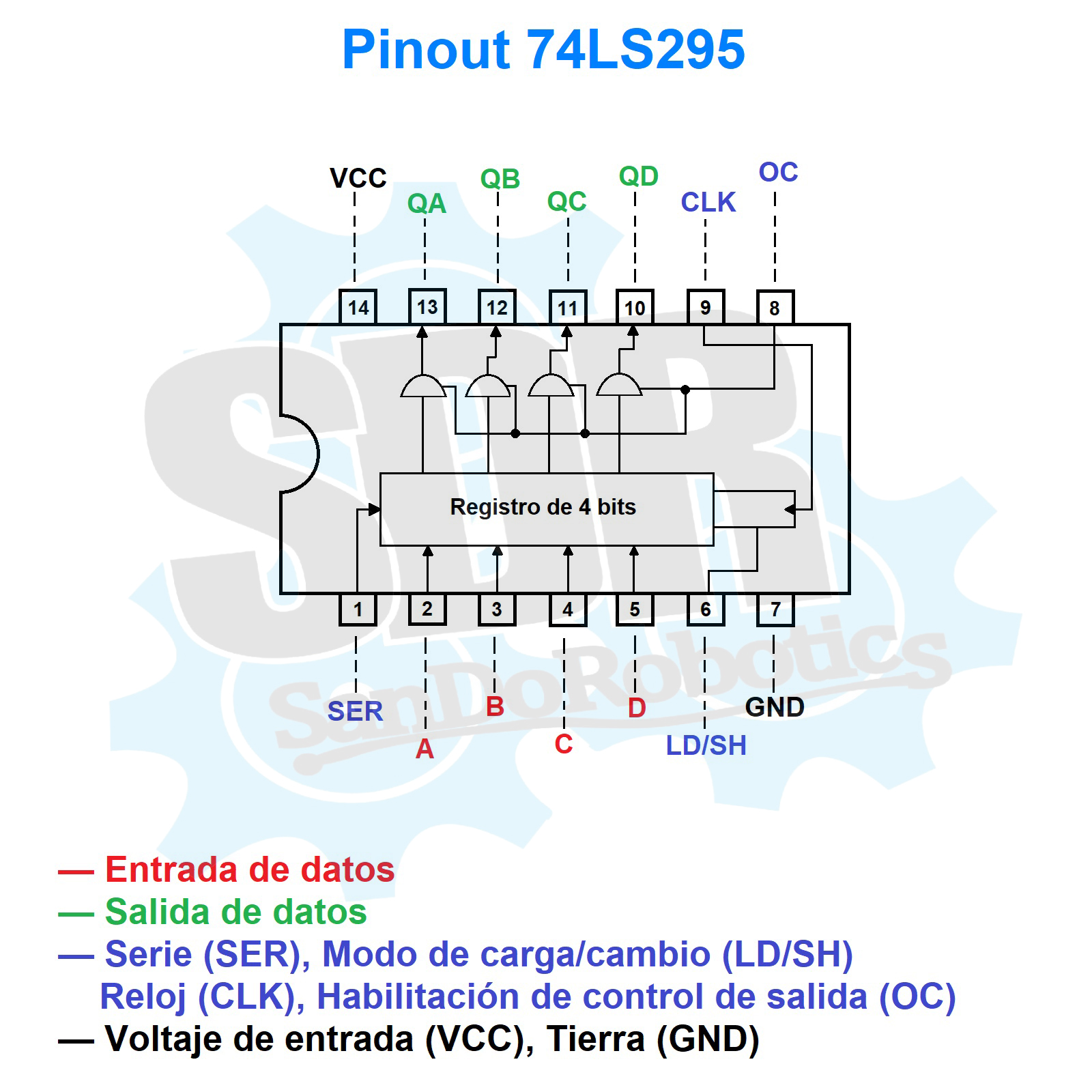
El circuito integrado 74LS295 maneja un registro de cambios de 4 bits. Gracias a su configuración puede habilitar 3 modos de funcionamiento: Carga paralela (Lateral), Desplazamiento a la derecha (De «QA» hacia «QD») o Desplazamiento a la izquierda (De «QD» hacia «QA»).
El circuito integrado 74LS295 maneja un registro de cambios de 4 bits. Gracias a su configuración puede habilitar 3 modos de funcionamiento: Carga paralela (Lateral), Desplazamiento a la derecha (De «QA» hacia «QD») o Desplazamiento a la izquierda (De «QD» hacia «QA»).
En cuanto a carga paralela se logra aplicando los cuatro bits de datos y enviando la entrada de control de modo a ALTO (HIGH). Los datos se cargan en los flip-flops asociados y aparecen en las salidas después de la transición de ALTO (HIGH) a BAJO (LOW) de la entrada del reloj. Durante la carga paralela, se inhibe la entrada de datos en serie.
El desplazamiento a la derecha se logra cuando el control de modo es BAJO (LOW); El desplazamiento a la izquierda se logra cuando el control de modo es ALTO (HIGH). Conectando la salida de cada flip-flop a la entrada paralela del flip-flop anterior (QD a la entrada C, etc.) y los datos en serie ingresados en la entrada D.
Cuando el control de salida es alto, los niveles lógicos normales de las cuatro salidas están disponibles para controlar las cargas o líneas de bus. Las salidas se desactivan independientemente del nivel del reloj mediante un nivel lógico bajo en la entrada de control de salida. Las salidas presentan entonces una alta impedancia y no cargan ni accionan la línea de bus; sin embargo, la operación secuencial de los registros no se ve afectada.
Especificaciones:
Modelo: SN74LS295
Tipo: Registro de cambios con 3 estados de salida.