El controlador de motor de alta potencia de Pololu es un discreto puente H MOSFET diseñado para impulsar grandes motores de DC con escobillas. El puente H se compone de dos MOSFET de canal N por tramo, y la mayoría del rendimiento de la placa está determinado por estos MOSFET (el resto de la placa contiene los circuitos para tomar las entradas del usuario y controlar los MOSFET). La hoja de datos de MOSFET está disponible en la pestaña «Recursos». El voltaje máximo absoluto para este controlador de motor es de 50 V. En condiciones normales de funcionamiento, el voltaje de ondulación en la línea de suministro puede elevar el voltaje máximo a un voltaje mayor que el promedio o previsto, por lo que un voltaje máximo seguro es de aproximadamente 44V.
Nota: los voltajes de la batería pueden ser mucho más altos que los voltajes nominales cuando se cargan, por lo que el voltaje máximo de la batería que recomendamos es de 36 V, a menos que se tomen las medidas adecuadas para limitar el voltaje máximo.
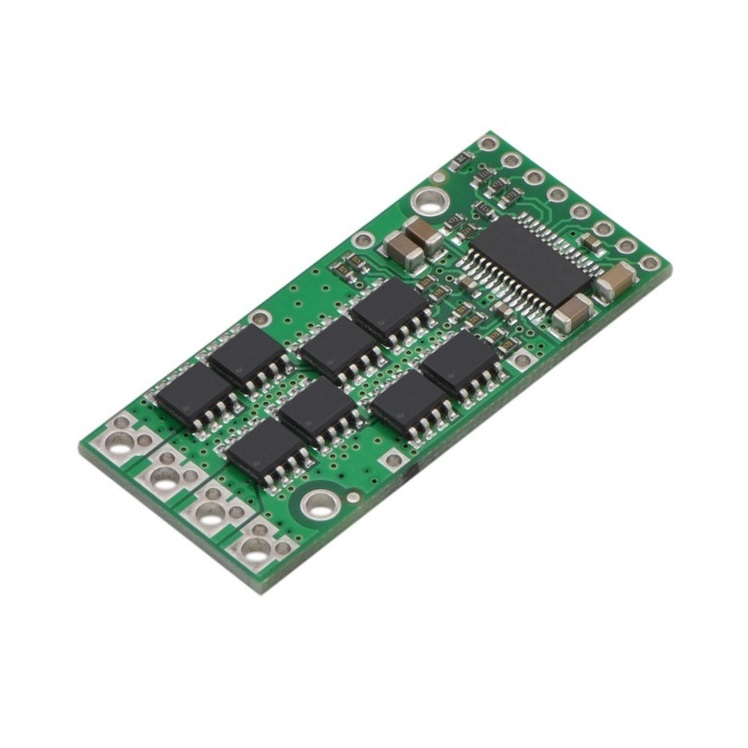
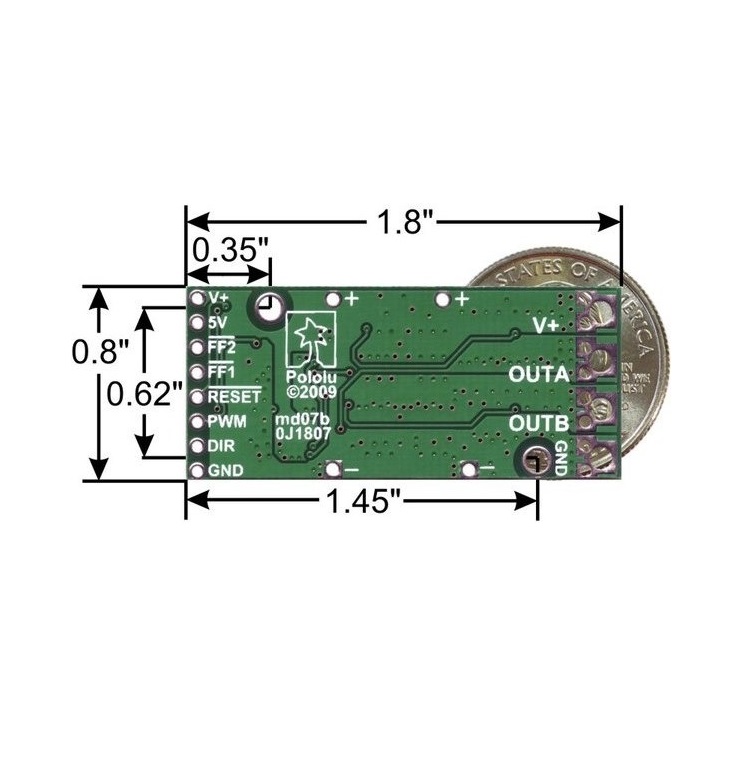
La versatilidad de este controlador lo hace adecuado para una gran variedad de corrientes y voltajes: puede entregar hasta 15 A de corriente continua con un tamaño de placa de solo 1.8″x 0.8″ y no requiere disipador de calor. Con la adición de un disipador de calor, puede impulsar un motor de hasta 20 A de corriente continua. El módulo ofrece una interfaz simple que requiere tan solo dos líneas de I/O, al mismo tiempo que permite operaciones de magnitud de signo y antifase bloqueada. La detección integrada de varias condiciones de cortocircuito protege contra causas comunes de fallas catastróficas; sin embargo, tenga en cuenta que la placa no incluye protección de potencia inversa o protección contra sobrecargas o sobrecalentamiento.
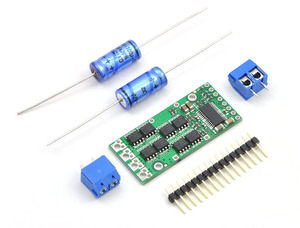
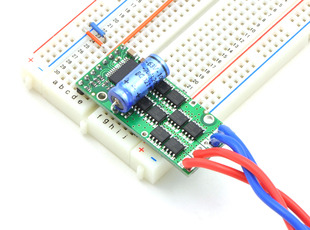
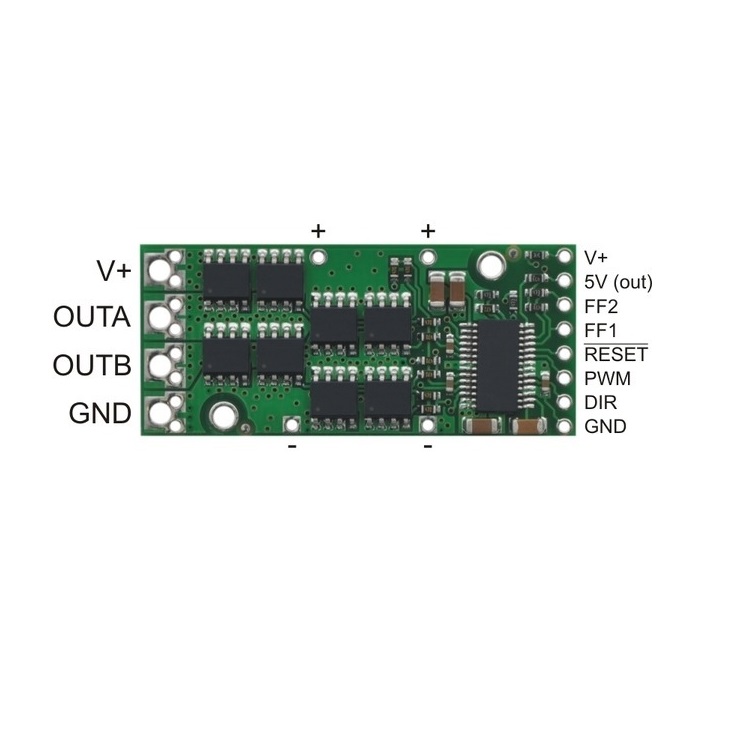
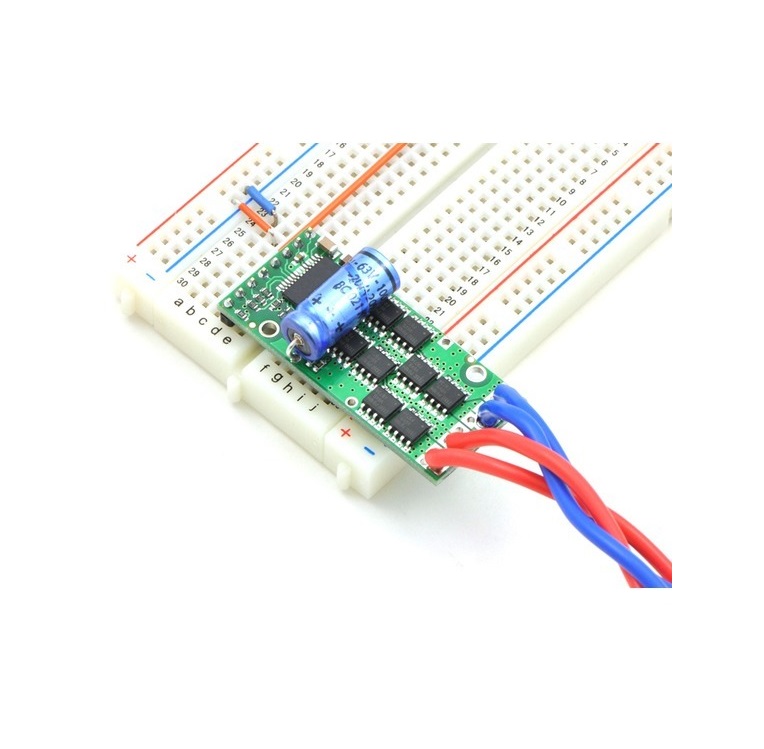
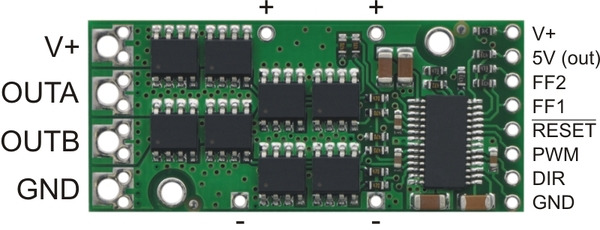
Las conexiones tanto del motor como de alimentación del mismo están en un lado de la placa, y las conexiones de control (lógica de 5 V) están en el otro lado. La fuente de alimentación del motor debe ser capaz de suministrar alta corriente, y debe instalarse un capacitor grande cerca del controlador del motor. Los capacitores axiales incluidos se pueden instalar directamente en la placa en los pines etiquetados ‘+’ y ‘-‘ como se muestra a continuación. Tales instalaciones son compactas pero pueden limitar las opciones de disipación de calor; Además, dependiendo de la calidad de la fuente de alimentación y las características del motor, podría requerirse un condensador más grande. Hay dos opciones para conectarse a las señales de alta potencia (V +, OUTA, OUTB, GND): orificios grandes en centros de 0.2 «, que son compatibles con los bloques de terminales incluidos, y pares de orificios espaciados de 0.1» que se pueden usar Con perfboards, breadboards, y conectores de 0.1 «.
Advertencia: tome las precauciones de seguridad adecuadas cuando utilice dispositivos electrónicos de alta potencia. ¡Asegúrese de saber lo que está haciendo cuando usa altos voltajes o corrientes! Durante el funcionamiento normal, este producto puede calentarse lo suficiente como para quemarte. Tenga cuidado al manipular este producto u otros componentes conectados a él.
Las conexiones lógicas están diseñadas para interactuar con sistemas de 5 V (5,5 V máx.); el umbral de señal de entrada mínimo alto es de 3.5 V, por lo que no recomendamos que conecte este dispositivo directamente a un controlador de 3.3 V. En una configuración típica, solo se requieren PWM y DIR. Los dos pines del indicador de fallas (FF1 y FF2) se pueden monitorear para detectar problemas (consulte la Tabla de indicadores de fallas a continuación para obtener más detalles). El pin RESET se eleva a V + a través de una resistencia de 20 kΩ. Cuando se mantiene bajo, pone al conductor en un modo de suspensión de baja potencia y borra cualquier indicador de falla enclavado. El pin V + en el lado lógico de la placa le da acceso para monitorear la fuente de alimentación del motor (no debe usarse para alta corriente). La placa también proporciona un pin regulado de 5 V que puede proporcionar unos pocos miliamperios (esto suele ser insuficiente para todo un circuito de control, pero puede ser útil como referencia o para microcontroladores de muy baja potencia).
 |
| PIN | Estado por Deault | Descripción |
|---|---|---|
| V+ | Esta es la conexión principal de la fuente de alimentación del motor de 5,5 – 50 V (máximo absoluto), que normalmente se debe realizar en el pad V + más grande. Los pads V + más pequeños a lo largo del lado largo de la placa están diseñados para los capacitores de la fuente de alimentación, y el pad V + más pequeño en el lado lógico de la placa le da acceso para monitorear la fuente de alimentación del motor (no debe usarse para alta corriente). | |
| 5V (out) | Esta salida regulada de 5V proporciona unos pocos miliamperios. Esta salida no debe conectarse a otras líneas de alimentación externa. ¡Tenga cuidado de no cortocircuitar accidentalmente este pin con el pin V + vecino mientras se suministra alimentación ya que al hacerlo destruirá la placa al instante! | |
| GND | Conexión a tierra para lógica y alimentación del motor. | |
| OUTA | Pin de Salida del motor A | |
| OUTB | Pin de Salida del motor B | |
| PWM | LOW | Entrada de modulación de ancho de pulso: una señal PWM en este pin corresponde a una salida PWM en las salidas del motor. |
| DIR | FLOAT | Entrada de dirección: cuando DIR es alta, la corriente fluirá de OUTA a OUTB, cuando sea baja, la corriente fluirá de OUTB a OUTA. |
| RESET | HIGH | El pin RESET se eleva a V + a través de una resistencia de 20 kΩ. Cuando se mantiene bajo, pone al controlador en un modo de suspensión de baja potencia y borra cualquier indicador de falla enclavado. |
| FF1 | LOW | Indicador del indicador de fallo 1: FF1 se pone alto cuando se han producido ciertos fallos. Vea la tabla de abajo para más detalles. |
| FF2 | LOW | Indicador del indicador de fallo 2: FF2 se pone alto cuando se han producido ciertos fallos. Vea la tabla de abajo para más detalles. |
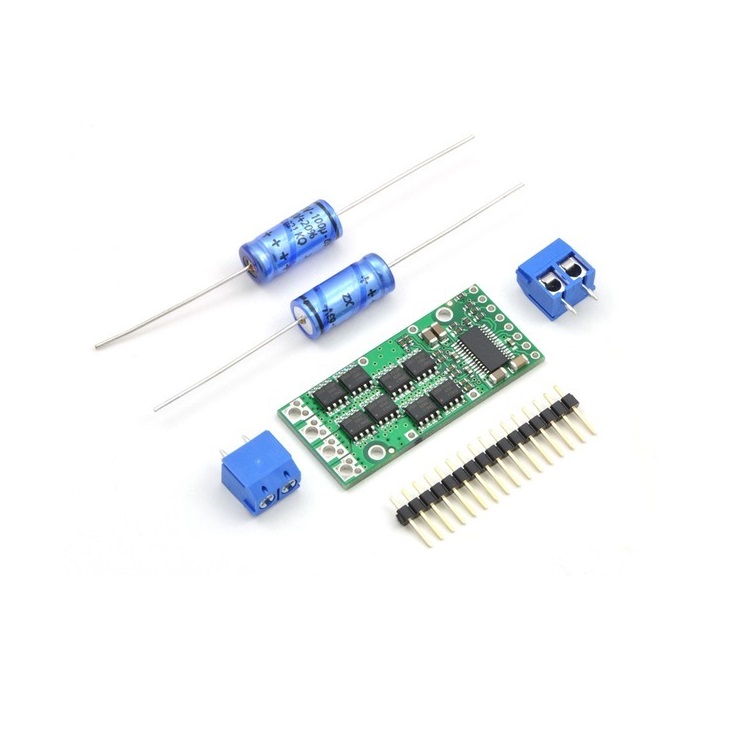
Con cada controlador se incluye un cabezal macho recto separable de 16 pines, dos capacitores de 100 uF y dos bloques de terminales de 2 pines. (Nota: los bloques de terminales solo tienen una capacidad nominal de 15 A; para aplicaciones de mayor potencia, use cables gruesos soldados directamente a la placa). Se recomienda conectar capacitores grandes a través de la fuente de alimentación; una forma de hacerlo es entre los orificios ‘+’ y ‘-‘, como se muestra a continuación. Los dos orificios de montaje están diseñados para ser utilizados con tornillos # 2 (no incluidos).
|
Con el pin de PWM bajo, ambas salidas del motor se mantendrán bajas (una operación de freno). Con PWM alto, las salidas del motor se activarán de acuerdo con la entrada DIR. Esto permite dos modos de operación: signo-magnitud, en el que el ciclo de trabajo PWM controla la velocidad del motor y DIR controla la dirección, y antifase bloqueado, en el que se aplica una señal modulada en ancho de pulso al pin DIR con PWM se mantuvo en alto.
En la operación antifase bloqueada, un ciclo de servicio bajo impulsa el motor en una dirección, y un ciclo de servicio alto impulsa el motor en la dirección opuesta; un ciclo de trabajo del 50% apaga el motor. Una implementación exitosa de antifase bloqueada depende de la inductancia del motor y la frecuencia de conmutación que suaviza la corriente (por ejemplo, haciendo que la corriente sea cero en el caso del ciclo de trabajo del 50%), por lo que puede requerirse una alta frecuencia de PWM.
| Tabla de verdad del controlador del motor | ||||
|---|---|---|---|---|
| PWM | DIR | OUTA | OUTB | Operación |
| H | L | L | H | Adelante |
| H | H | H | L | Atrás |
| L | X | L | L | Freno |
El controlador del motor admite frecuencias PWM de hasta 40 kHz, aunque las frecuencias más altas producen mayores pérdidas de conmutación en el controlador del motor. Además, el controlador tiene un tiempo muerto (cuando las salidas no están activadas) de aproximadamente 3 us por ciclo, por lo que los ciclos de trabajo alto no están disponibles en altas frecuencias. Por ejemplo, a 40 kHz, el período es de 25 us; si el tiempo muerto ocupa 3us, el ciclo de trabajo máximo disponible es 22/25, o 88%. (El 100% está siempre disponible, por lo que al aumentar gradualmente la entrada PWM de 0 a 100%, la salida aumentará de 0 a 88%, quedando en un 88% para las entradas de 88% a 99%, y luego cambiará al 100%. )
El controlador del motor puede tolerar corrientes de pico superiores a 200 A. Los valores nominales de corriente pico son para transitorios rápidos (por ejemplo, cuando se enciende un motor por primera vez), y el índice continuo de 15 A depende de varias condiciones, como la temperatura ambiente . La principal limitación proviene de la calefacción y la disipación de energía; por lo tanto, a altas corrientes, el controlador del motor estará extremadamente caliente, y el rendimiento se puede mejorar agregando disipadores de calor o enfriando la placa. La placa de circuito impreso del controlador está diseñada para extraer calor de los MOSFET, pero el rendimiento puede mejorarse agregando un disipador de calor. Con un disipador de calor adecuado, el controlador del motor puede entregar hasta 20 A de corriente continua. Para obtener más información sobre la disipación de energía, consulte la hoja de datos de los MOSFET en la pestaña Recursos.
Debido a que no hay una limitación de temperatura interna en el controlador del motor, todo el sistema debe estar diseñado para mantener la corriente de carga por debajo del límite de 15 A. Una forma fácil de lograr esto es seleccionar un motor con una corriente de bloqueo por debajo de ese límite. Sin embargo, debido a que un buen motor puede tener corrientes de parada docenas de veces más altas que la corriente de operación típica, los motores con corrientes de parada que son cientos de amperios pueden usarse con este controlador siempre que la corriente de funcionamiento se mantenga baja. Por ejemplo, un motor con una corriente de parada de 60 A puede funcionar bien a 6 A, dejando un margen seguro para que la corriente se duplique durante varios minutos a la vez o se triplique durante varios segundos. Sin embargo, si el motor se detiene por completo durante un período prolongado, es probable que el motor o el controlador se quemen.
Advertencia: este controlador de motor no tiene apagado por sobrecorriente o sobrecalentamiento. Cualquiera de las dos condiciones puede causar daños permanentes al motor. Podría considerar usar un sensor de corriente externo, como un sensor de corriente bidireccional ACS714 ± 30A para monitorear su consumo actual.
El controlador del motor puede detectar tres estados de falla diferentes, que se informan en los pines FF1 y FF2. Las fallas detectables son cortocircuitos en la salida, bajo voltaje y sobrecalentamiento. Una falla de cortocircuito está bloqueada, lo que significa que las salidas permanecerán apagadas y el indicador de falla permanecerá alto hasta que se reinicie la placa (RESET). La falla de bajo voltaje desactiva las salidas pero no está bloqueada. El fallo de sobrecalentamiento proporciona una indicación débil de que la placa está demasiado caliente, pero no indica directamente la temperatura de los MOSFET, que generalmente son los primeros componentes que se recalientan. La operación de falla se resume a continuación.
| Estado | Descripción de falla | Salidas Deshabilitadas | Cerrado hasta que reinicie | |
|---|---|---|---|---|
| FF1 | FF2 | |||
| L | L | Sin falla | No | No |
| L | H | Corticircuito | Si | Si |
| H | L | Sobre Temperatura | No | No |
| H | H | Bajo Voltaje | Si | No |