La serie DYNAMIXEL X es una nueva línea de actuadores en red de alto rendimiento. Gracias a su sofisticada arquitectura de control cuentan con un torque mejorado, diseño compacto, mayor durabilidad y capacidad de expansión, además de una caja trasera hueca minimiza la tensión del cable (cableado de 3 vías) entre otras ventajas mas otras ventajas mas.
La serie DYNAMIXEL X es una nueva línea de actuadores en red de alto rendimiento. Gracias a su sofisticada arquitectura de control cuentan con un torque mejorado, diseño compacto, mayor durabilidad y capacidad de expansión, además de una caja trasera hueca minimiza la tensión del cable (cableado de 3 vías) entre otras ventajas mas otras ventajas mas.
Para obtener información más detallada, visite la página de información del producto DYNAMIXEL X-Series.
Contenido del paquete:
Descripción
Cantidad
DYNAMIXEL
XH430-W350-T
1
HORN
HN12-N101
1
ARANDELA
Arandela de Teflon (para ensamblar con el Horn)
1
CABLE
Robot Cable-X4P 180mm
1
Robot Cable-X4P
(Convertible) 180mm
1
TORNILLOS/TUERCAS
Tornillos (WB M2.5*4)
16
Tornillos (WB M2.5*6)
1
WTornillos(WB M2*3)
10
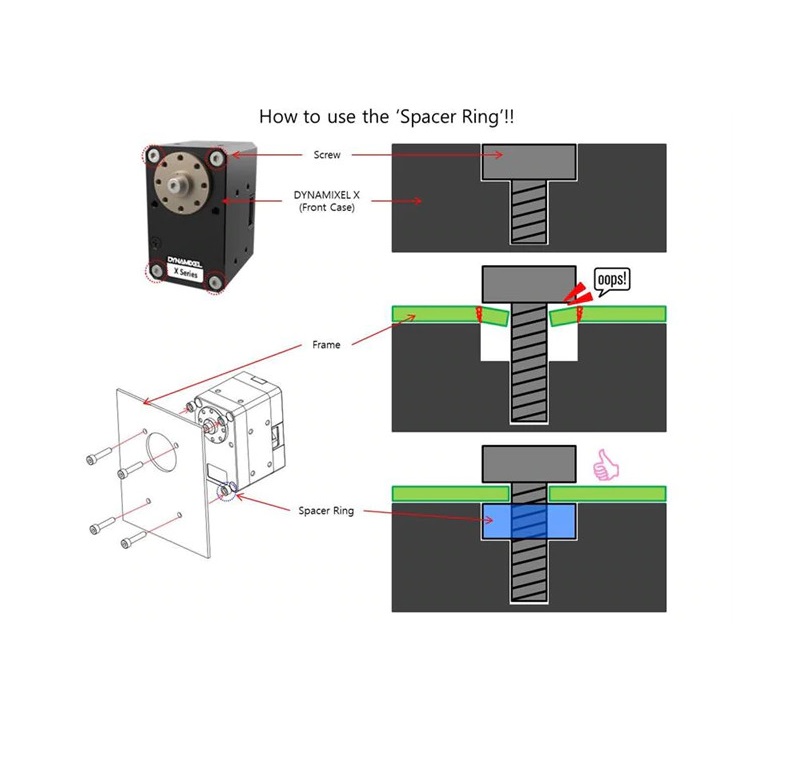
ETC
Anillo Espaciador
8
Especificaciones H/W
Número de Modelo
XH430-W350-T
Peso (g)
82g
Dimensiones (mm)
28.5mm x 46.5mm x 34mm
Relación de engranes
353.5:1
Voltaje de Operación (V)
11.1
12
14.8
Torque Pico (N.m)
3.1
3.4
4.2
Corriente Pico (A)
1.2
1.3
1.5
Velocidad sin carga (RPM)
27
30
37
MCU
ST CORTEX-M3 ( STM32F103C8 @ 72MHZ,32BIT)
Sensor de Posición
Encoder absoluto sin contacto (12BIT,360°) por AMS
Motor
Maxon Motor
Resolución
0.088° x 4,096 steps
Rango de Operación
Modo de control actual: giro sin fin
Modo de control de velocidad: giro sin fin
Modo de control de posición: 360 °
Modo de control extendido: ± 256 [rev]
Modo de control de posición basado en la corriente: ± 256 [rev]
Modo de control PWM: giro sin fin
Voltaje de Entrada (V)
10~14.8V (Voltaje Recomendado: 12V)
Temperatura de Operación (°C)
-5°C ~ 80°C
Señal de Comando
Digital
Tipo de Protocolo
Comunicación serie asíncrona semidúplex (8 bits, 1ra parte, sin paridad)
Enlace (físico)
bus Multi Drop de nivel TTL
ID
253 ID (0~252)
Taza de Baud
9600 bps ~ 4.5 Mbps
Retroalimentación
Posición, velocidad, corriente, tick en tiempo real, trayectoria, temperatura, voltaje de entrada, etc.
Material
Case : Metal (Frente, medio)
Ingeniería de plástico (Atrás)
Engrane: Completamente metal
Corriente en espera
40 mA
Configuración predeterminada
ID: 1
Velocidad de transmisión: 57600bps
* Por favor, haga las modificaciones necesarias a ID, velocidad de transmisión, etc. después de la compra.
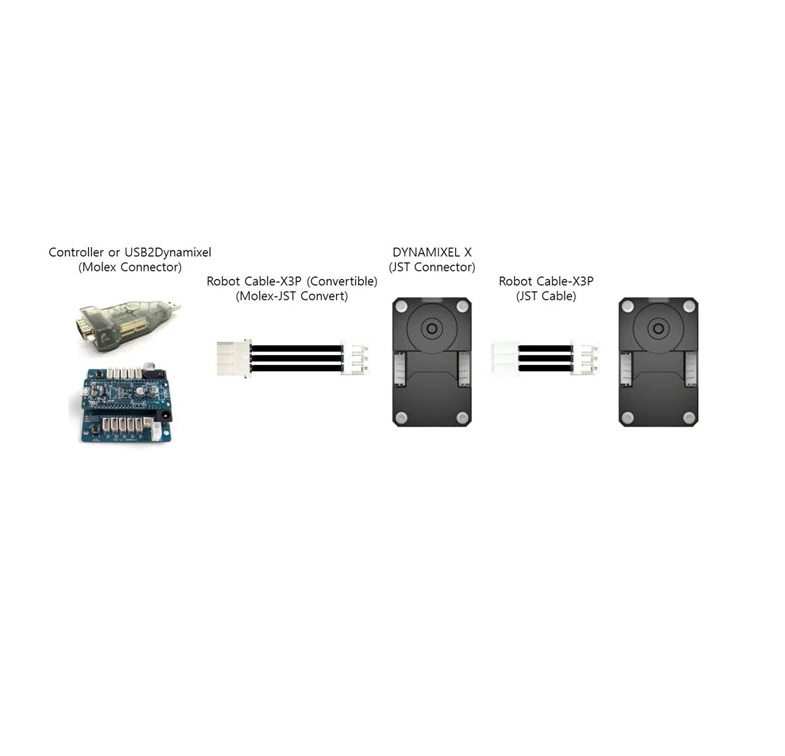
** Interfaz de PC: USB2Dynamixel (se requiere cable convertible Molex-JST)
Hyperlinks
Frame, Horn, Bearing Compatible Chart : Click Here