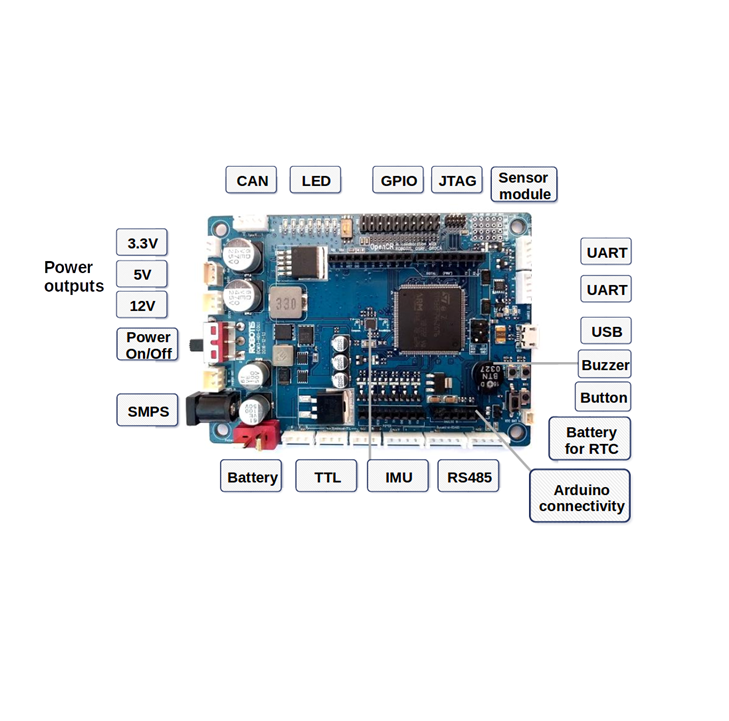
OpenCR1.0 (Módulo de control de código abierto para ROS) es un controlador de robot de código abierto integrado con una potente MCU de la línea ARM Cortex-M7. Los códigos fuente de hardware, software, esquemas, PCB Gerber, BOM y firmware de OpenCR1.0, el controlador principal utilizado en la plataforma oficial de educación ROS TurtleBot3, son accesibles y están abiertos al público. Es compatible con RS-485 y TTL para controlar los Dynamixels, y ofrece UART, CAN y una variedad de otros entornos de comunicación, herramientas de desarrollo como Arduino IDE también están disponibles.
OpenCR1.0 (Módulo de control de código abierto para ROS) es un controlador de robot de código abierto integrado con una potente MCU de la línea ARM Cortex-M7. Los códigos fuente de hardware, software, esquemas, PCB Gerber, BOM y firmware de OpenCR1.0, el controlador principal utilizado en la plataforma oficial de educación ROS TurtleBot3, son accesibles y están abiertos al público. Es compatible con RS-485 y TTL para controlar los Dynamixels, y ofrece UART, CAN y una variedad de otros entornos de comunicación, herramientas de desarrollo como Arduino IDE también están disponibles. Tiene la ventaja de poder operar con más potencia cuando se usa con un controlador host como SBC (Single Board Computer). Proporciona varias fuentes exclusivas basadas en ROS, de modo que puede maximizar las funciones de OpenCR1.0 cuando se usa ROS.
Contenido del paquete:
Descripción
Cantidad
CONTROLADOR
OpenCR1.0
1
CABLE
USB Micro B Cable
1
Especificaciones de Hardware:
Item
Especificaciones:
Microcontrolador
STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS)