
$900.00 MXN (IVA Incluido)
Sin existencias
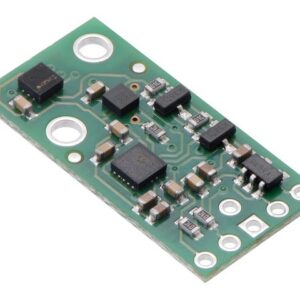
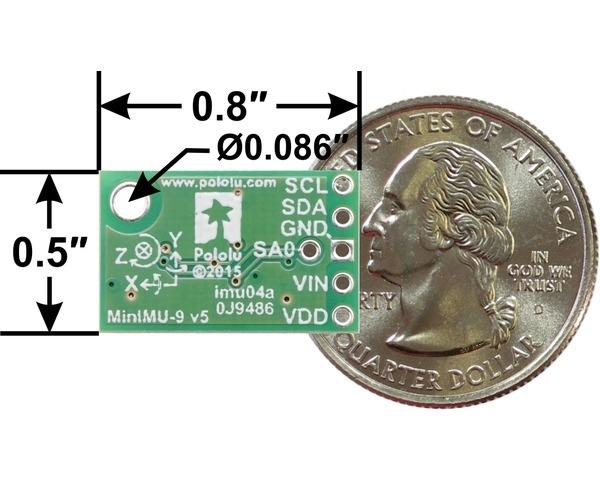
El Pololu MinIMU-9 v5 es una unidad de medición inercial (IMU), que viene equipado con un acelerómetro de 3 ejes LSM6DS33, giroscopio de 3 ejes y un magnetómetro de 3 ejes LIS3MDL en una placa de 0,8 “x 0,5″. Una interfaz I²C accede a nueve rotación independiente, aceleración y mediciones magnéticas que se pueden utilizar para calcular la orientación absoluta del sensor. El MinIMU-9 v5 incluye un regulador de voltaje y un circuito de desplazamiento de nivel que permiten el funcionamiento 2,5 a 5,5 V, y espaciamiento estándar de 0,1”.
Localización:C6
| Peso | 0.01 kg |
|---|---|
| Fabricante | Pololu |
Sin existencias
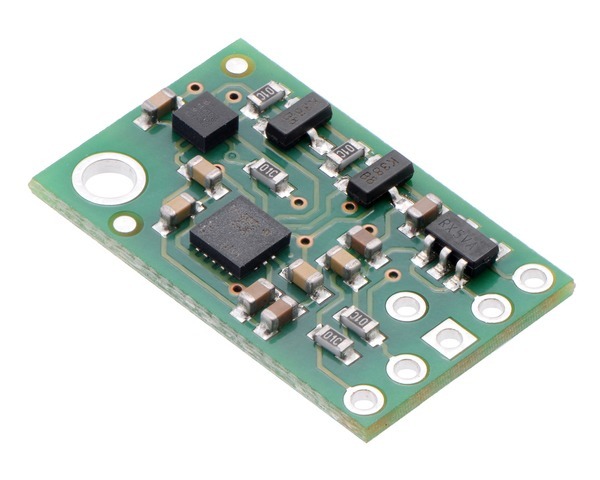
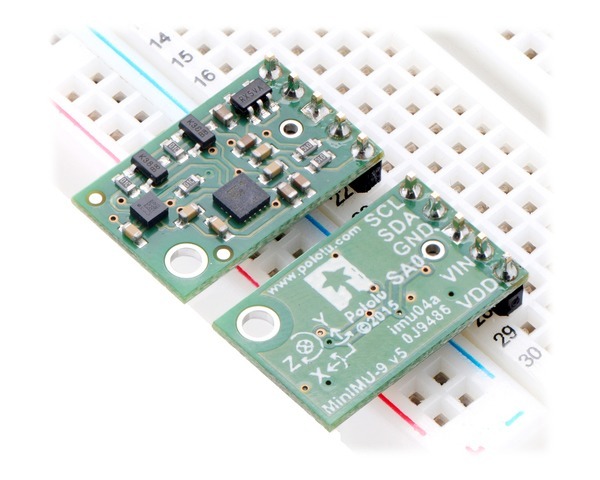
El MinIMU-9 v5 de Pololu es una placa compacta (0,8″ × 0,5″) que combina el giroscopio de 3 ejes y el acelerómetro de 3 ejes LSM6DS33 de ST y el magnetómetro de 3 ejes LIS3MDL para formar una unidad de medición inercial (IMU); por lo tanto, recomendamos leer atentamente la hoja de datos LSM6DS33 (pdf de 1 MB) y la hoja de datos LIS3MDL (pdf de 2 MB) antes de usar este producto. Estos sensores son excelentes circuitos integrados, pero sus pequeños paquetes dificultan su uso para el estudiante o aficionado típico. También funcionan a voltajes inferiores a 3,6 V, lo que puede dificultar la interconexión para microcontroladores que funcionan a 5 V. El MinIMU-9 v5 aborda estos problemas incorporando electrónica adicional, incluido un regulador de voltaje y un circuito de cambio de nivel, al tiempo que mantiene el tamaño general lo más compacto posible. La placa se entrega completamente equipada con sus componentes SMD, incluidos el LSM6DS33 y el LIS3MDL, como se muestra en la imagen del producto.
En comparación con el MinIMU-9 v3 anterior, la versión v5 utiliza sensores MEMS más nuevos que proporcionan algunos aumentos en la precisión (menor ruido y compensaciones de tasa cero). El MinIMU-9 v5 es compatible con pines con el MinIMU-9 v3, pero debido a que utiliza chips de sensor diferentes, será necesario cambiar el software escrito para versiones anteriores de IMU para que funcione con el v5.
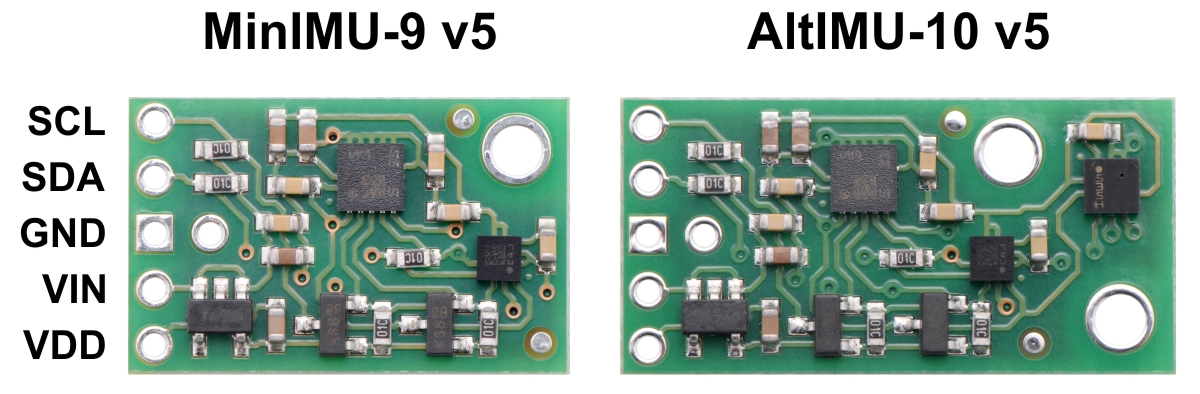
El MinIMU-9 v5 también es compatible con pines con el AltIMU-10 v5, que ofrece la misma funcionalidad aumentada por un barómetro digital que se puede utilizar para obtener mediciones de presión y altitud. El AltIMU incluye un segundo orificio de montaje y es 0,2″ más largo que el MinIMU. Cualquier código escrito para el MinIMU-9 v5 también debería funcionar con el AltIMU-10 v5.
El LSM6DS33 y el LIS3MDL tienen muchas opciones configurables, incluidas sensibilidades seleccionables dinámicamente para el giroscopio, el acelerómetro y el magnetómetro. Cada sensor también tiene una opción de velocidad de datos de salida. Se puede acceder a los dos circuitos integrados a través de una interfaz I²C/TWI compartida, lo que permite que los sensores se direccionen individualmente a través de una sola línea de reloj y una sola línea de datos. Además, un pin de configuración de dirección esclava permite a los usuarios cambiar las direcciones I²C de los sensores y tener dos MinIMU conectados en el mismo bus I²C. (Para obtener información adicional, consulte la sección Comunicación I²C a continuación).
Las nueve lecturas independientes de rotación, aceleración y magnéticas (a veces llamadas 9DOF) proporcionan todos los datos necesarios para crear un sistema de referencia de actitud y rumbo (AHRS). Con un algoritmo adecuado, un microcontrolador o una computadora pueden usar los datos para calcular la orientación de la placa MinIMU. El giroscopio se puede utilizar para rastrear con mucha precisión la rotación en una escala de tiempo corta, mientras que el acelerómetro y la brújula pueden ayudar a compensar la deriva del giroscopio a lo largo del tiempo al proporcionar un marco de referencia absoluto. Los ejes respectivos de los dos chips están alineados en la placa para facilitar estos cálculos de fusión de sensores.
La placa portadora incluye un regulador de voltaje lineal de baja caída que proporciona los 3,3 V requeridos por el LSM6DS33 y el LIS3MDL, lo que permite que el módulo se alimente desde una única fuente de alimentación de 2,5 V a 5,5 V. La salida del regulador está disponible en el pin VDD y puede suministrar casi 150 mA a dispositivos externos. La placa de expansión también incluye un circuito que cambia el reloj I²C y las líneas de datos al mismo nivel de voltaje lógico que el VIN suministrado, lo que simplifica la interconexión de la placa con sistemas de 5 V. El espaciado de pines de 0,1″ de la placa facilita su uso con placas de pruebas estándar sin soldadura y placas perforadas de 0,1″.
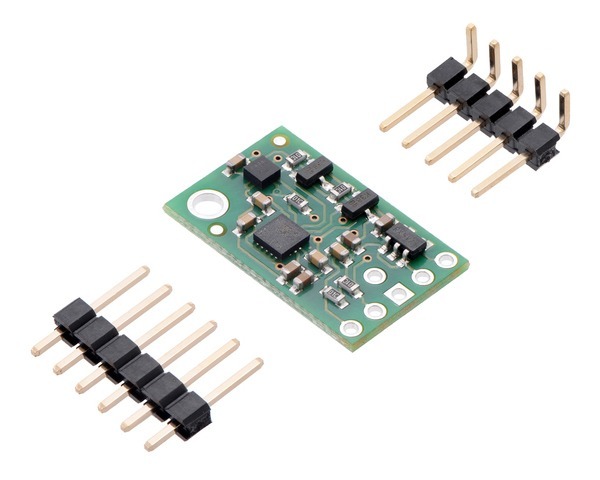
Se incluye una tira de 1×6 de pines de cabezal de 0,1″ y una tira de 1×5 de pines de cabezal en ángulo recto de 0,1″. Puede soldar la tira de cabezal de su elección a la placa para usarla con cables personalizados o placas de pruebas sin soldadura, o soldar cables directamente a la placa para instalaciones más compactas. La placa cuenta con dos orificios de montaje que funcionan con tornillos #2 o M2 (no incluidos).
Se necesita un mínimo de cuatro conexiones para usar el MinIMU-9 v5: VIN, GND, SCL y SDA. VIN debe estar conectado a una fuente de 2,5 V a 5,5 V, GND a 0 voltios, y SCL y SDA deben estar conectados a un bus I²C que funcione en el mismo nivel lógico que VIN. (Alternativamente, si está utilizando la placa con un sistema de 3,3 V, puede dejar VIN desconectado y omitir el regulador incorporado conectando 3,3 V directamente a VDD).
| PIN | Descripción |
| SCL | Línea de reloj I²C con cambio de nivel: ALTO (HIGH) es VIN, BAJO (LOW) es 0 V |
| SDA | Línea de datos I²C con cambio de nivel: ALTO (HIGH) es VIN, BAJO (LOW) es 0 V |
| GND | La conexión a tierra (0 V) de la fuente de alimentación. La fuente de control I²C también debe compartir una conexión a tierra común con esta placa. |
| VIN | Esta es la conexión de fuente de alimentación principal de 2,5 V a 5,5 V. Los cambiadores de nivel SCL y SDA llevan los bits altos del bus I²C a este nivel. |
| VDD | Salida de regulador de 3,3V o fuente de alimentación lógica de bajo voltaje, según VIN. Cuando se suministra VIN y es mayor que 3,3V, VDD es una salida regulada de 3,3V que puede suministrar hasta aproximadamente 150mA a componentes externos. Alternativamente, al interactuar con un sistema de 2,5V a 3,3V, VIN se puede dejar desconectado y se puede suministrar energía directamente a VDD. Nunca suministre voltaje a VDD cuando VIN esté conectado y nunca suministre más de 3,6 V a VDD. |
| SA0 | Entrada de nivel lógico de 3,3V para determinar las direcciones de esclavos I²C de los dos circuitos integrados (consulte a continuación). Se activa de forma predeterminada a través de una resistencia de 10 kΩ. Este pin no tiene nivel desplazado y no tolera 5V. |
El giroscopio y el acelerómetro del LSM6DS33 y el magnetómetro del LIS3MDL se pueden consultar y configurar a través del bus I²C. Cada uno de los tres sensores actúa como un dispositivo esclavo en el mismo bus I²C (es decir, sus líneas de reloj y datos están unidas para facilitar la comunicación). Además, los cambiadores de nivel en el reloj I²C (SCL) y las líneas de datos (SDA) permiten la comunicación I²C con microcontroladores que funcionan al mismo voltaje que VIN (2,5 V a 5,5 V). Se puede encontrar una explicación detallada de los protocolos utilizados por cada dispositivo en la hoja de datos del LSM6DS33 (pdf de 1 MB) y la hoja de datos del LIS3MDL (pdf de 2 MB). Se puede encontrar información más detallada sobre I²C en general en la especificación del bus I²C de NXP (pdf de 371 k).
El LSM6DS33 y el LIS3MDL tienen direcciones esclavas independientes en el bus I²C. La placa conecta los pines de selección de dirección esclava (SA0 o SA1) de los dos IC y los lleva a VDD a través de una resistencia de 10 kΩ. Puede hacer que el pin SA0 esté bajo para cambiar la dirección esclava. Esto le permite tener dos MinIMU (o una MinIMU v5 y una AltIMU v5) conectadas en el mismo bus I²C. La siguiente tabla muestra las direcciones esclavas de los sensores:
| Sensor | Dirección esclava (predeterminada) | Dirección esclava (SA0 activado en nivel bajo) |
|---|---|---|
| LSM6DS33 (giro and acelerometro) | 1101011b | 1101010b |
| LIS3MDL (magnetometro) | 0011110b | 0011100b |
Ambos chips del MinIMU-9 v5 son compatibles con los estándares I²C de modo rápido (400 kHz) así como con el modo normal.
Hemos escrito una biblioteca Arduino básica LSM6DS33 y una biblioteca Arduino LIS3MDL que facilitan la interconexión del MinIMU-9 v5 con una placa Arduino o compatible con Arduino, como un A-Star. También simplifican la configuración de los sensores y la lectura de los datos brutos del giroscopio, el acelerómetro y el magnetómetro.
Para una demostración de lo que puede hacer con estos datos, puede convertir un Arduino conectado a un MinIMU-9 v5 en un sistema de referencia de actitud y rumbo, o AHRS, con este programa Arduino. Utiliza los datos del MinIMU-9 para calcular los ángulos estimados de cabeceo, balanceo y guiñada, y puede visualizar la salida del AHRS con un programa de prueba 3D en su PC (como se muestra en una captura de pantalla anterior). Este software se basa en el trabajo de Jordi Munoz, William Premerlani, Jose Julio y Doug Weibel.
Las hojas de datos proporcionan toda la información que necesita para utilizar los sensores en el MinIMU-9 v5, pero seleccionar los detalles importantes puede llevar algo de tiempo. A continuación, se incluyen algunos consejos para comunicarse con el LSM6DS33 y el LIS3MDL y configurarlos, que esperamos le ayuden a ponerse en marcha un poco más rápido:
El giroscopio, el acelerómetro y el magnetómetro están todos en modo de apagado de forma predeterminada. Debe encenderlos configurando los registros de configuración correctos.
Puede leer o escribir varios registros en el LIS3MDL con un solo comando I²C, activando el bit más significativo de la dirección del registro para habilitar el incremento automático de la dirección.
La dirección del registro en el LSM6DS33 se incrementa automáticamente durante un acceso de varios bytes, lo que le permite leer o escribir varios registros en un solo comando I²C. A diferencia de cómo funcionan otros sensores ST, el incremento automático está habilitado de forma predeterminada; puede desactivarlo con el campo IF_INC en el registro CTRL3_C.
Además de las hojas de datos, ST proporciona notas de aplicación para LSM6DS33 (pdf de 1 MB) y LIS3MDL (pdf de 598 k) que contienen información adicional y sugerencias sobre su uso.
$200.00 MXN (IVA Incluido)
$1,400.00 MXN (IVA Incluido)