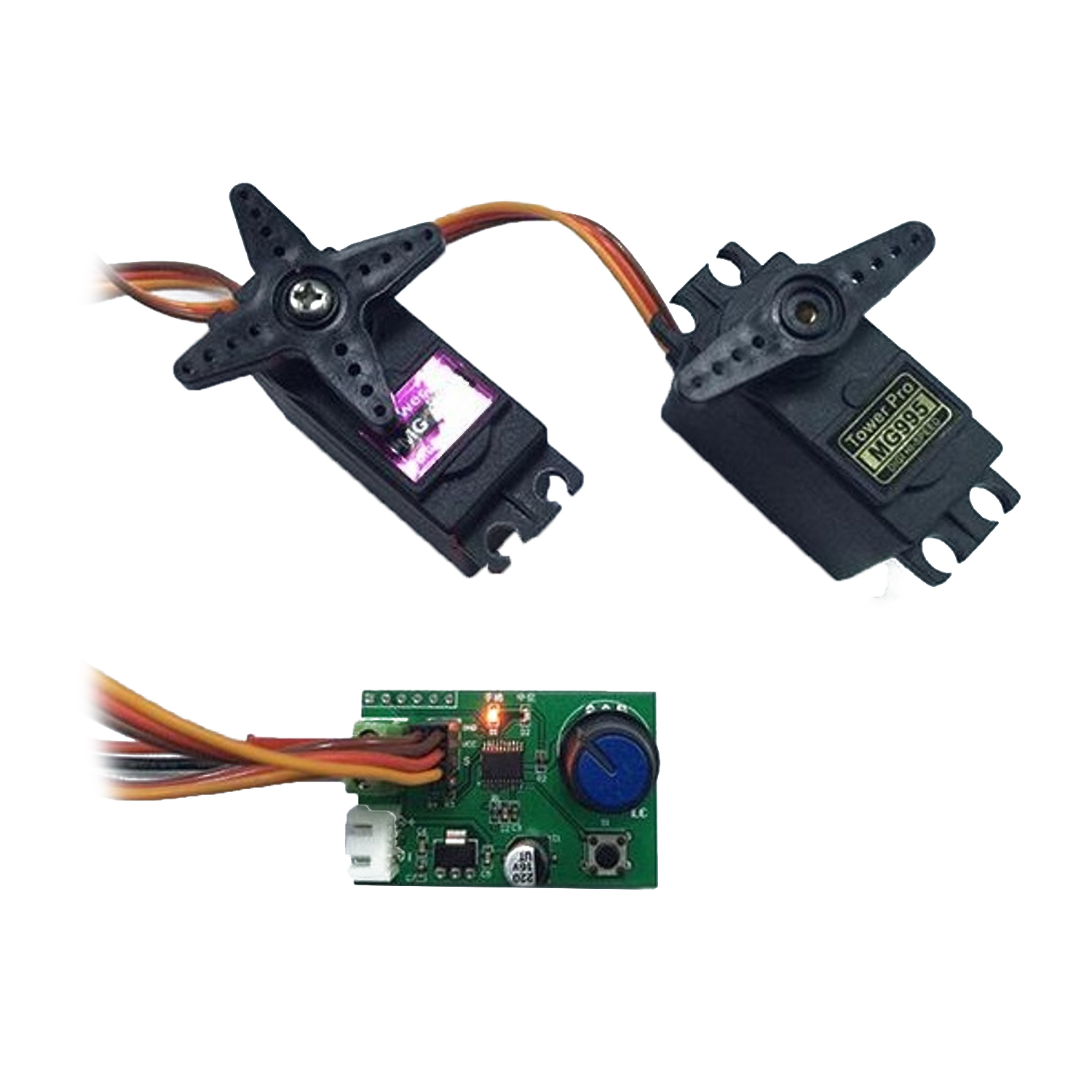
Este módulo es un controlador plug-and-play, el cual cuenta con una perilla de ajuste/depuración de dirección para servomotores (como los Futaba, MG995, SG90, etc). Una de las ventajas de este módulo es que cuenta con función de retorno, control de comando en serie y tres modos de servocontrol de 2 canales. Ya sea que controle manualmente con la perilla y el botón integrados al módulo o que lo controle a través de puerto serial desde un equipo de cómputo o una tarjeta de control (MCU).
Características:
- La MCU estable integrada de 8 bits se utiliza para generar señales PWM de alta resolución con un control preciso.
- Precisión del control del mecanismo de dirección: 0,09 grados (es decir, valor de cambio mínimo PWM 1us)
- Soporte de mecanismo de dirección con un período de control de 20 ms y un ancho de pulso en el rango de 0,5-2,5 ms
- Los usuarios pueden usar directamente un cabezal de carga de batería de litio 2S para depurar y regresar al mecanismo de dirección.
- Rango de voltaje de la fuente de alimentación: 5-9V (basado en el voltaje de suministro del servo real)
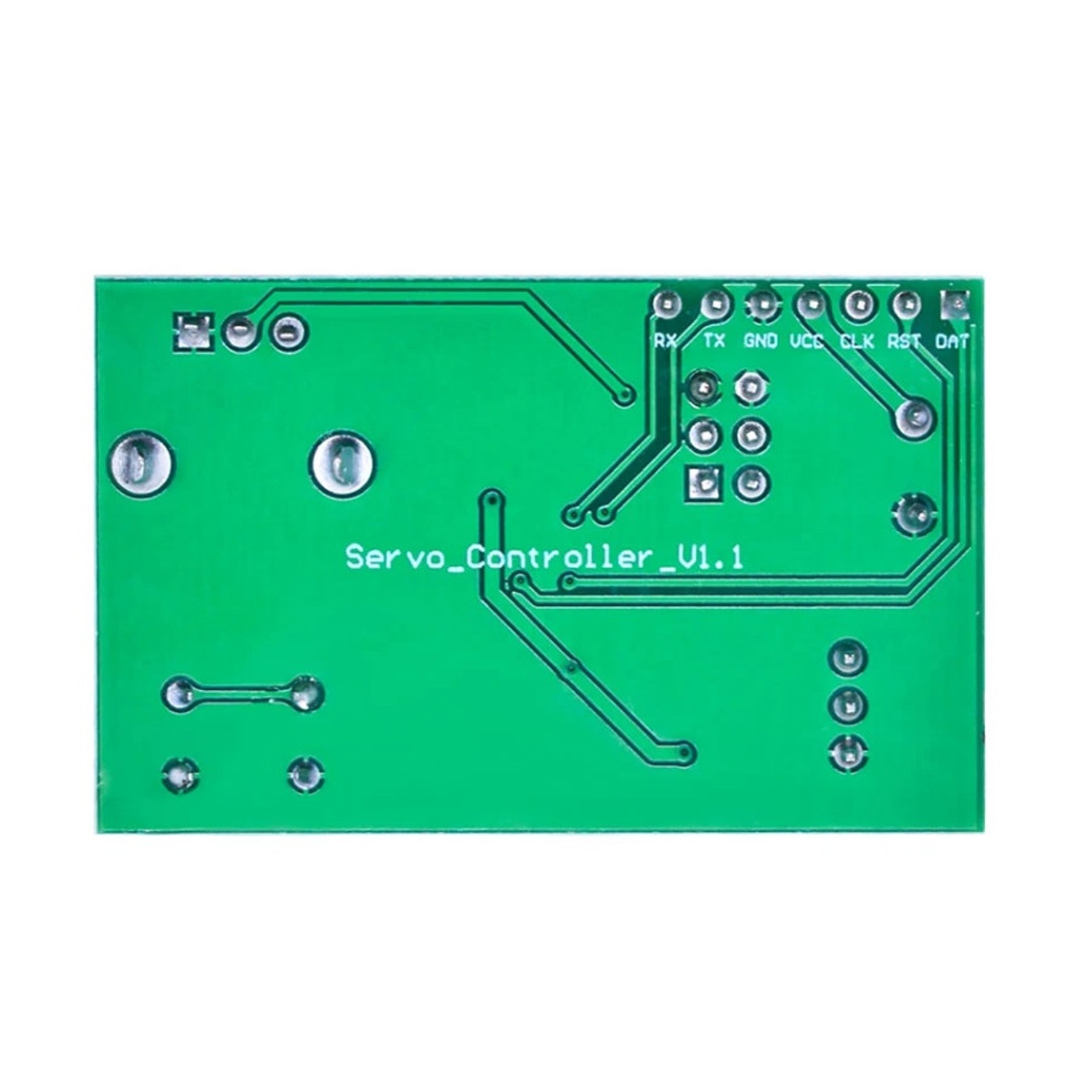
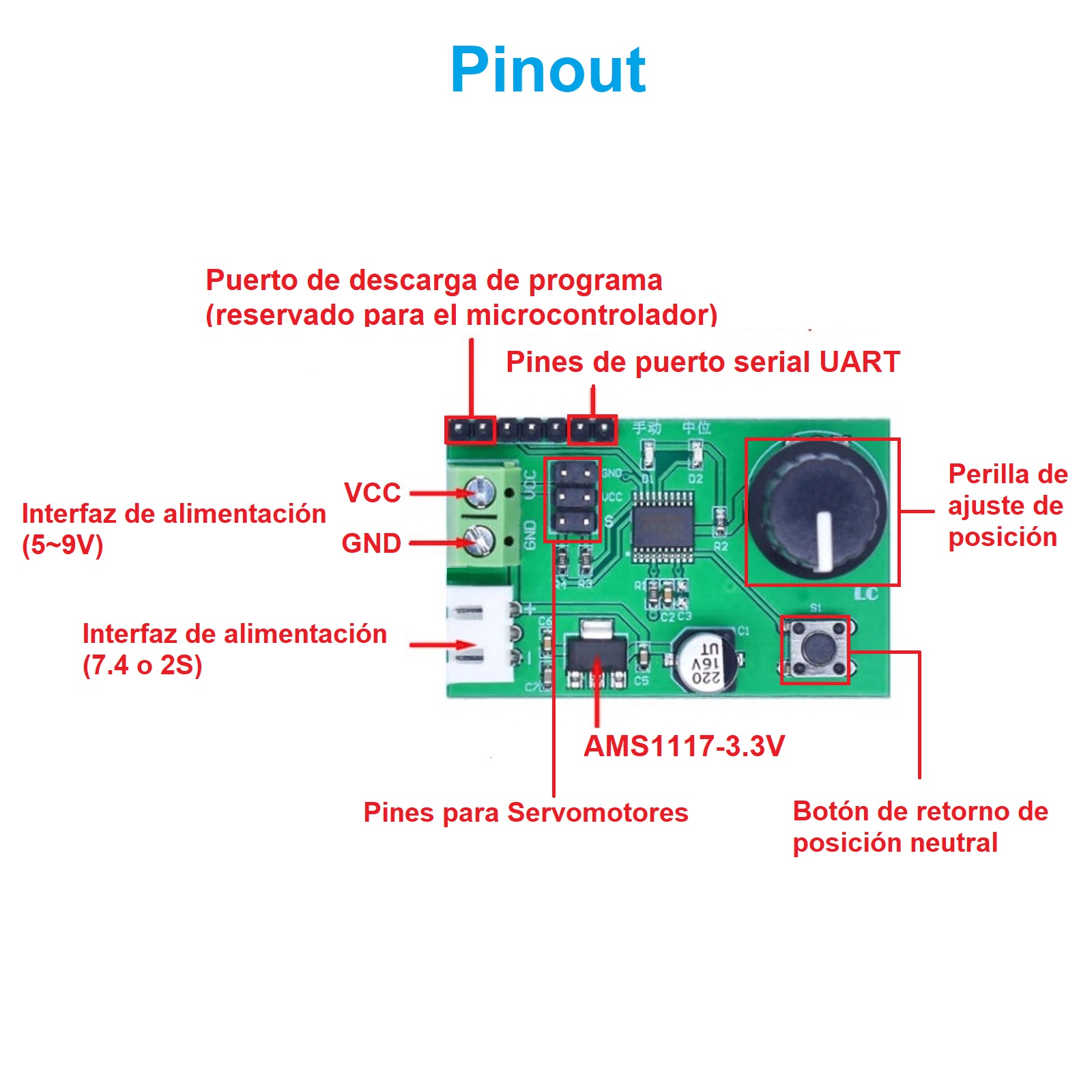
- Interfaz:
- Bornera de alimentación: VCC, GND (5~9V)
- Conector JST XH2.54: Alimentación en espera, puede conectar una batería de litio de 2 celdas en serie (7.4V)
- Asignación de pines 2×3: Interfaz para servomotor (S, VCC y GND)
- Asignación de pines 1×7: Interfaz para comunicación serial (DAT, RST, CLK, VCC, GND, TX y RX)
- Dimensiones: 29,8×47,2mm
Instrucciones de uso:
1.- Conecte su fuente de alimentación a VCC y GND. Inserte el servo en la configuración 2×3. Asegúrese de identificar y conectar correctamente su servo (VCC es positivo, GND es tierra y S es señal).
2.- Modo manual: El modo manual se selecciona mediante el botón a bordo, momento en el que el LED manual está encendido y el LED neutral está apagado. El modo manual incluye control de perilla y control de puerto serie. El valor predeterminado es el control de perilla. Los dos modos de control cambiarán automáticamente, es decir, cuando se detecta que el potenciómetro gira, se selecciona la perilla. Cuando el puerto serie recibe un comando de control válido, se selecciona el control del puerto serie.
2.1.- Control de perilla: Gire directamente el potenciómetro para controlar que el mecanismo de dirección gire en el rango de 0-180°
2.2.- Control del puerto serie: La MCU integrada puede recibir y analizar el comando de posición del servo enviado desde la computadora host, MCU externa y otros dispositivos (velocidad en baudios 9600, compatible con nivel de 3,3V/5V), controlando así las 2 vías respectivamente.
Definición de valores:
- a, # es el símbolo inicial, el cual es indispensable.
- b, indica que el número de mecanismos de dirección controlados, con un total de 2 canales (rango: 00-01 corresponde a los servos M0 y M1 respectivamente);
- c, P es un símbolo fijo en el formato de instrucción, el cual es indispensable.
- d, indica el ancho del múltiplo PWM (rango: 0500-2500 corresponde a 0-180° respectivamente).
- e, ! es el símbolo que indica el final de una instrucción, el cual es indispensable.
Por ejemplo: Envíe «#00P1500!» para girar el servo M0 a la posición de 90°. Envíe «#01P1000!» girar el servo M1 a la posición 45°.
Para la comunicación serial. Primero, prepare un módulo de puerto serie USB a _TTL (como CH340, FT232, etc.). El TX, RX y GND del módulo de puerto serie están conectados respectivamente a RX, TX y GND de la tarjeta de control. Seleccione un número de puerto correcto, después de que la conexión sea exitosa, arrastre las barras de progreso 0 y 1 para controlar los servos M0 y M1 respectivamente.
3.- Modo de retorno de posición neutral: Este se selecciona mediante el botón a bordo. En este momento, el LED manual se apaga, mientras que el LED neutral se enciende y los servos M0 y M1 regresan simultáneamente a la posición neutral.