$1,960.00 MXN (IVA Incluido)
1 disponibles
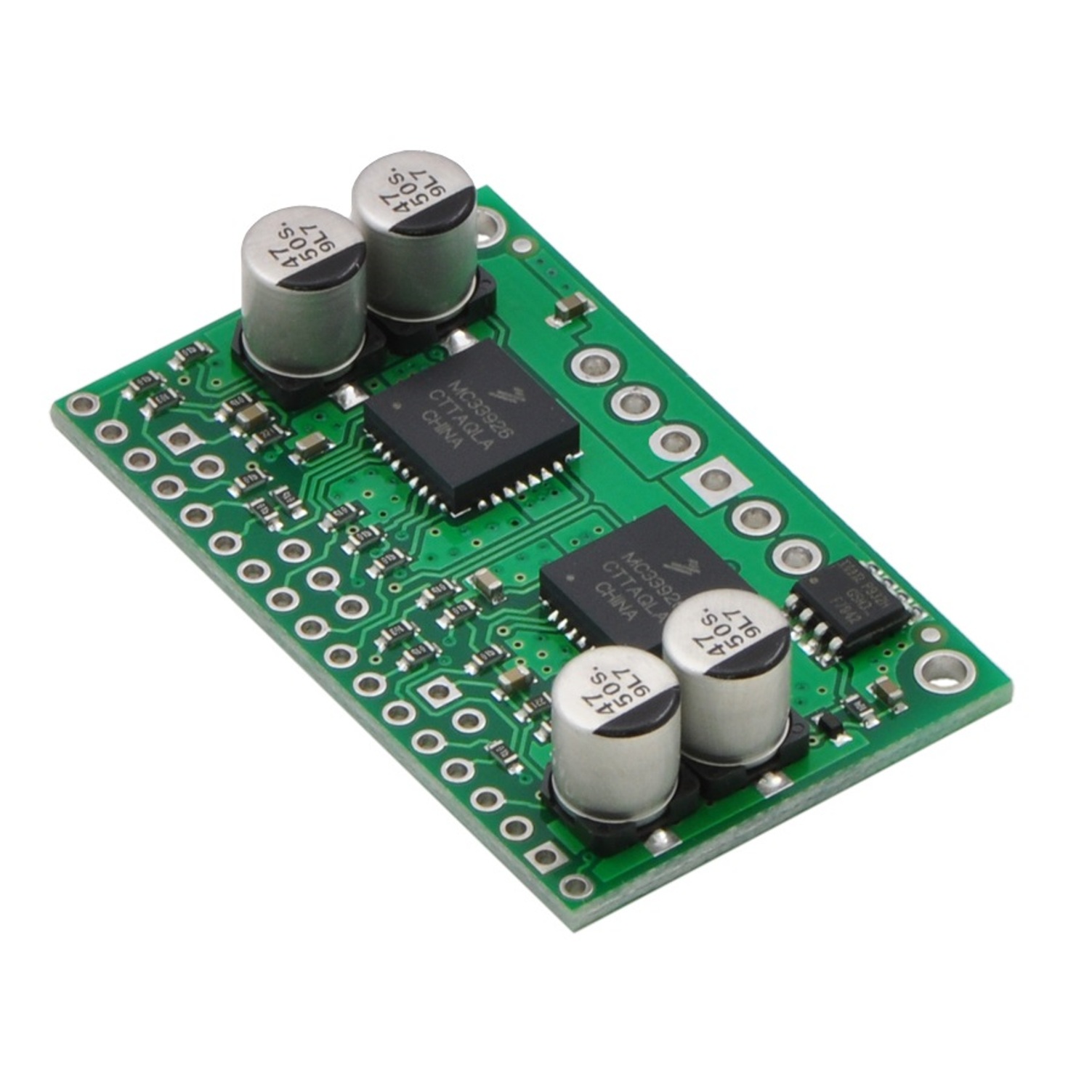
Este controlador de motor dual DC, basado en MC33926 full H-bridge de Freescale, tiene un amplio rango de funcionamiento 5 – 28V y puede entregar casi continuamente 3A (pico de 5A) a cada uno de sus dos canales de motor. El MC33926 funciona con niveles lógicos de 3 – 5V, es compatible con ultrasonidos (hasta 20 kHz) PWM, y cuenta con realimentación de corriente, protección voltaje invertido, bajo voltaje, sobre-corriente, y el exceso de temperatura.
Localización: D4
| Fabricante | Pololu |
|---|
1 disponibles
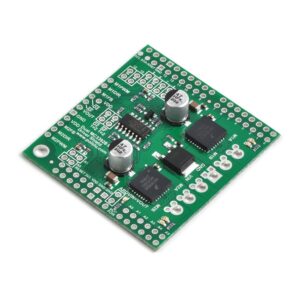
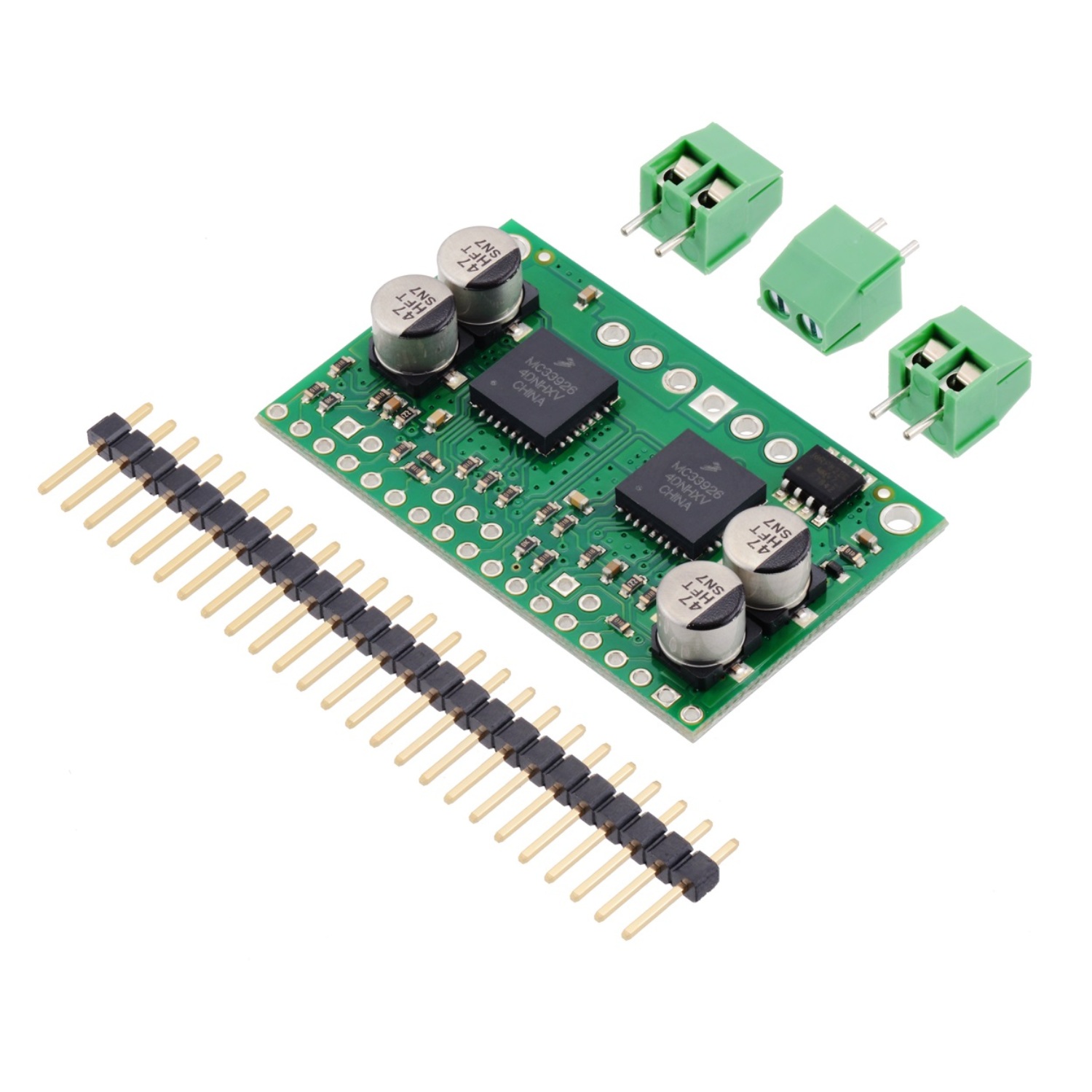
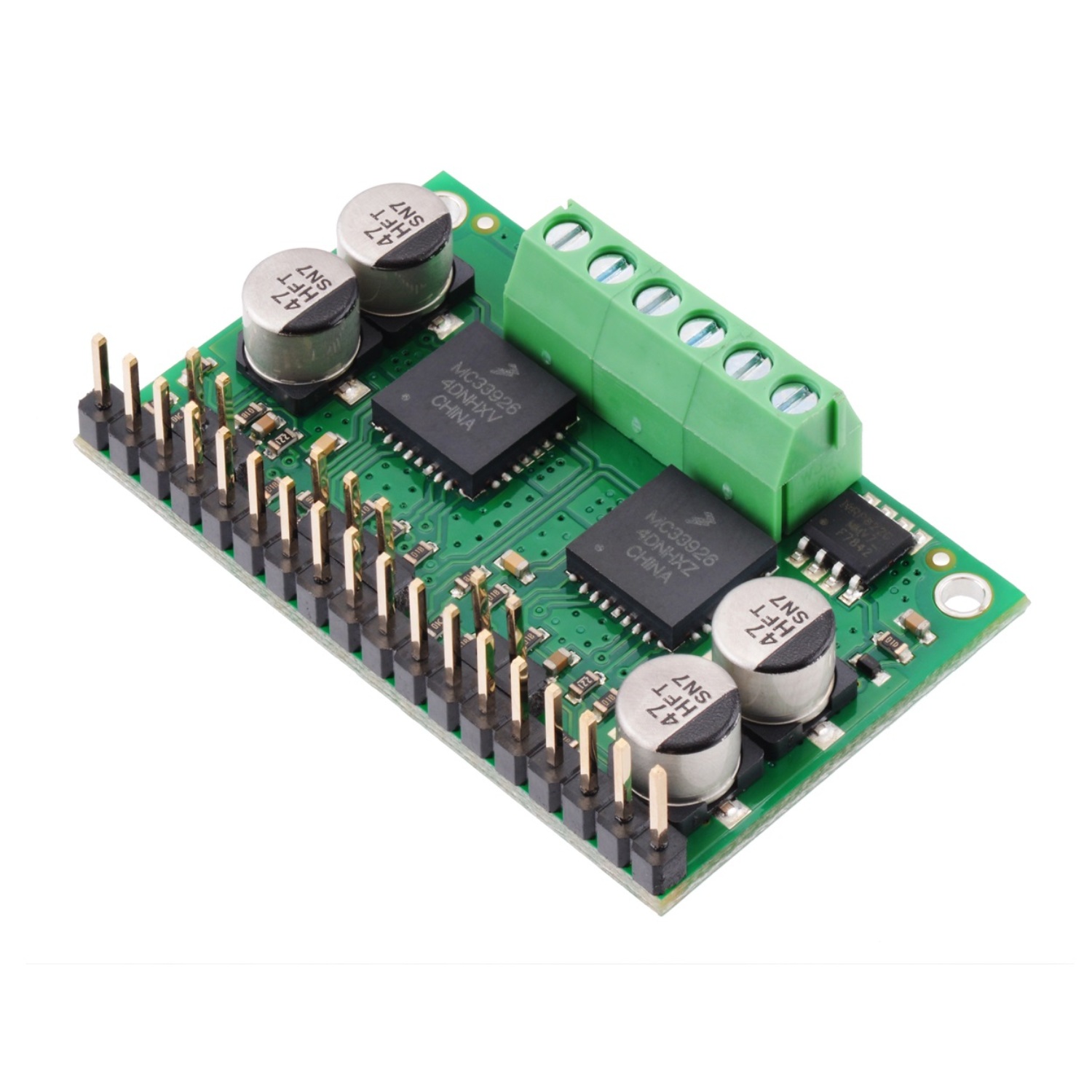
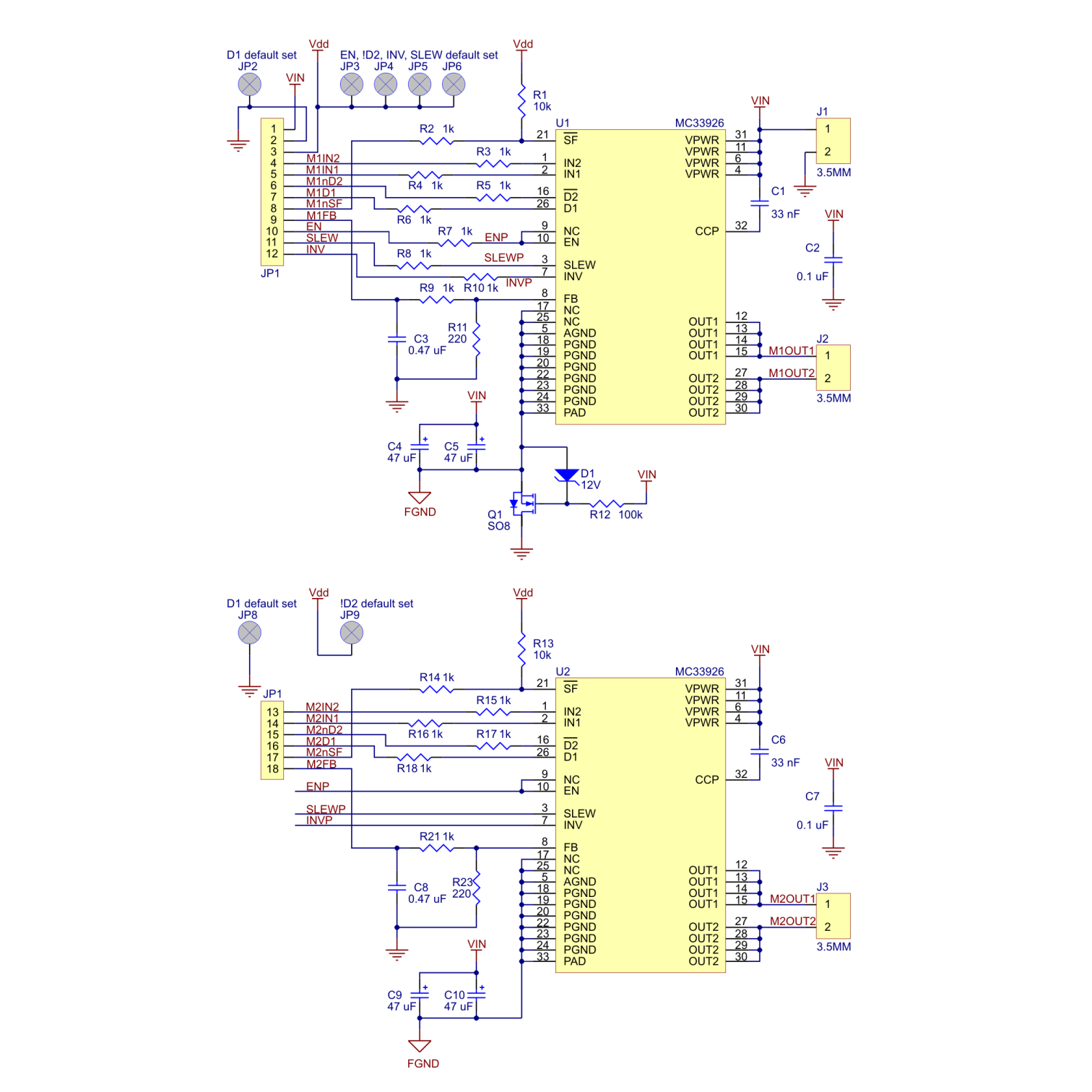
El controlador de motor dual MC33926 es una placa de conexión que cuenta con dos circuitos integrados de puente H Freescale MC33926. Puede suministrar hasta casi 3 A de corriente continua por canal a dos motores de DC con escobillas de 5 V a 28 V, y puede tolerar corrientes máximas de hasta 5 A por canal durante unos segundos, lo que lo convierte en un excelente controlador de motor de uso general. para motores DC de tamaño mediano y para robots de accionamiento diferencial que utilizan dichos motores. El MC33926 admite modulación de ancho de pulso (PWM) ultrasónica (hasta 20 kHz) del voltaje de salida del motor, lo que elimina los sonidos de conmutación audibles causados por el control de velocidad PWM, y un circuito de retroalimentación de corriente para cada motor genera un voltaje analógico en su respectivo FB. pin que es proporcional a la corriente de salida. Dado que esta placa es portadora del puente H Freescale Semiconductor MC33926, recomendamos leer atentamente la hoja de datos del MC33926 (pdf de 1 MB).
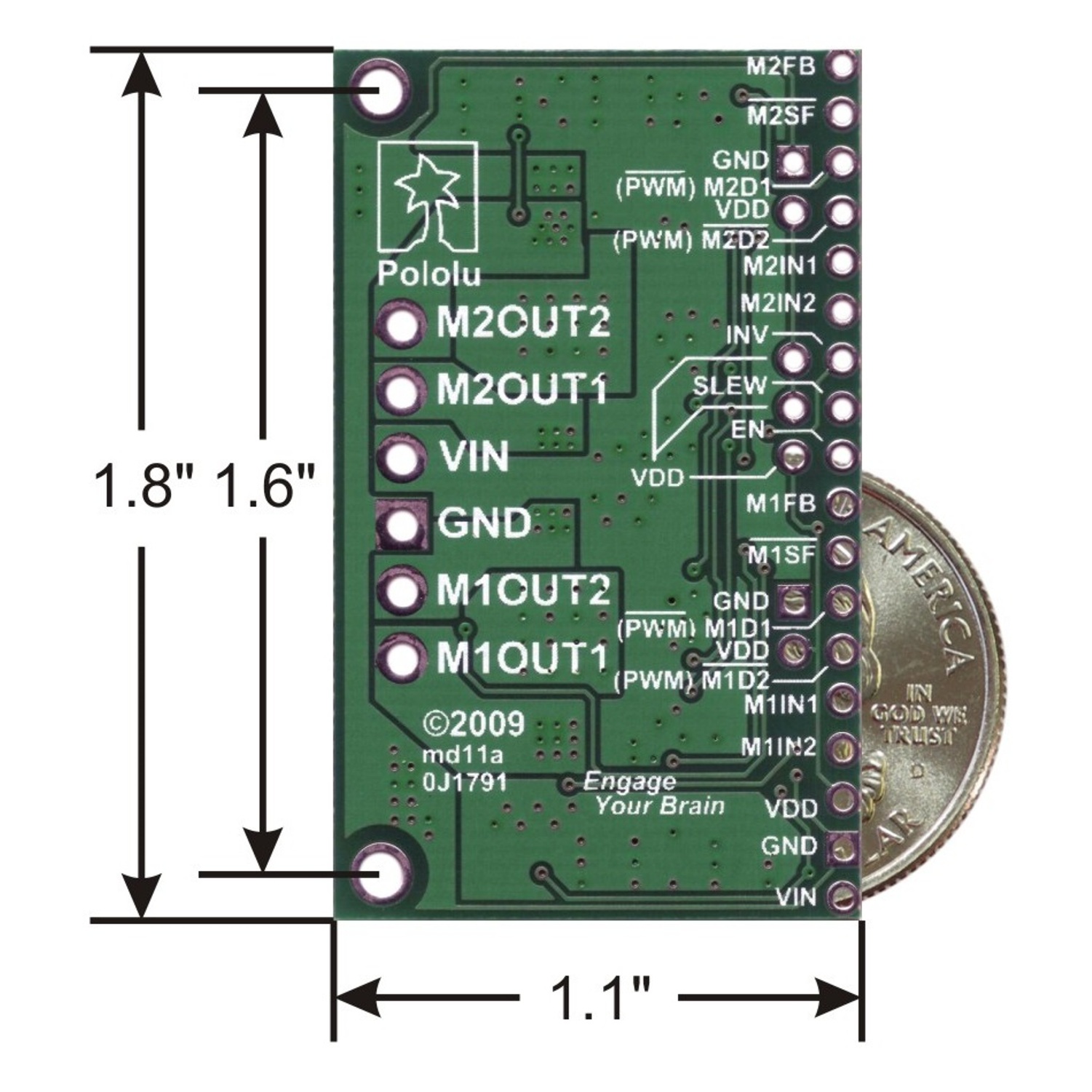
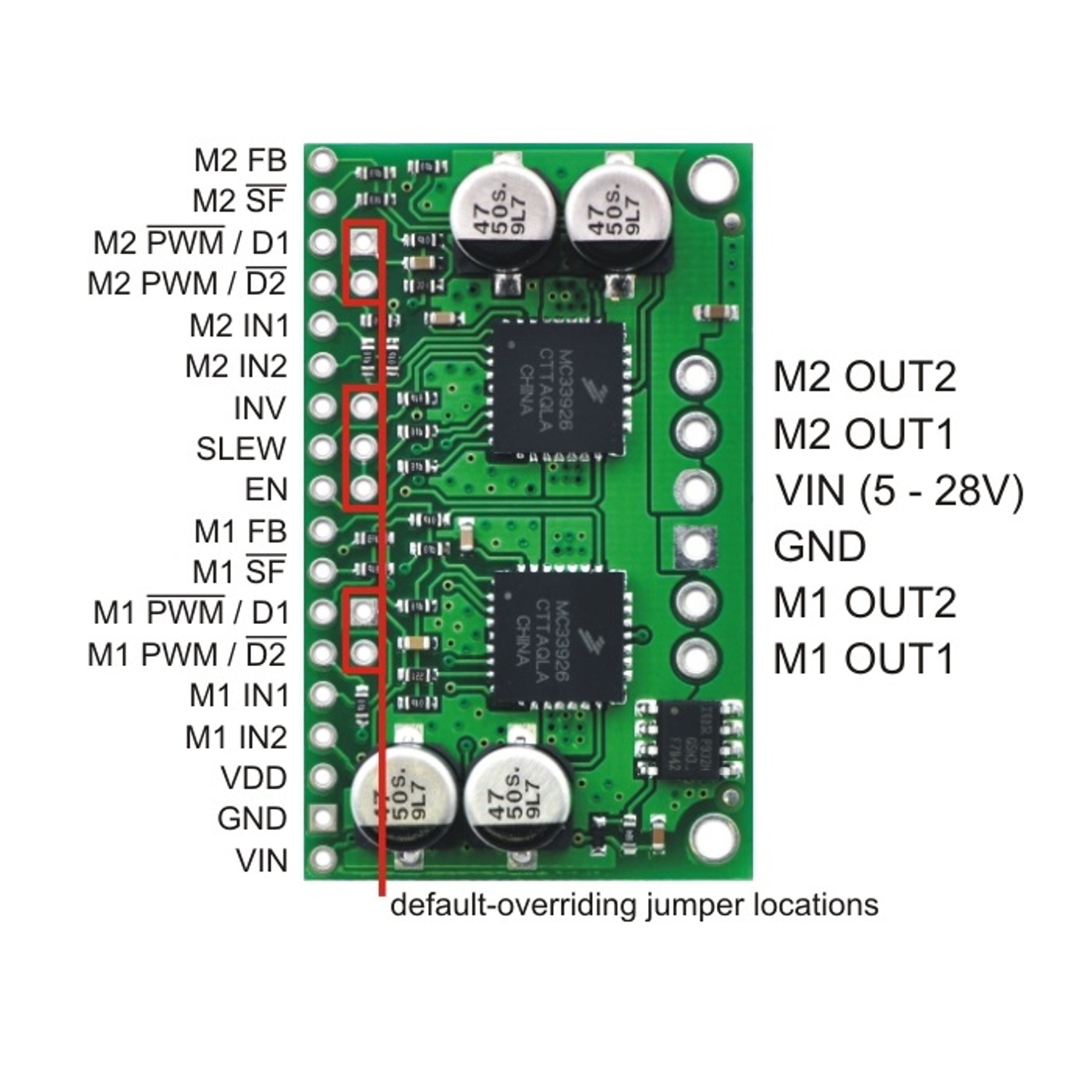
Los estados predeterminados de muchos de los pines de entrada lógica del MC33926 requieren que se realicen muchas conexiones externas para usar esta placa. Para reducir la cantidad de conexiones externas necesarias, la placa tiene siete puentes de anulación predeterminados. Todos los puentes que anulan los valores predeterminados están vinculados a VDD, excepto los puentes D1, que están vinculados a GND. Todos los puentes VDD son círculos; las almohadillas del puente de tierra son cuadradas. Tenga en cuenta que el tablero tiene solo un pin de inversión, giro y habilitación; cada uno de estos tres pines afecta a ambos controladores del motor.
| PIN | Estado por default | Descripción |
| VIN | HIGH | Esta es la conexión principal de fuente de alimentación del motor de 5 V a 28 V, que normalmente debe realizarse al panel VIN más grande. La operación de 5 V a 8 V reduce la salida de corriente máxima; el dispositivo también está protegido contra transitorios de hasta 40 V. La almohadilla VIN más pequeña se puede utilizar para distribuir el nodo VIN al resto del circuito de la aplicación; Para aplicaciones de menor corriente, el pin también se puede utilizar para alimentar la placa y los motores. |
| GND | LOW | Conexión a tierra para alimentación lógica y de motores. |
| OUT2 | HIGH | Pin de salida del motor, controlado por IN2. |
| OUT1 | HIGH | Pin de salida del motor, controlado por IN1. |
| VDD | HIGH | Conexión de alimentación lógica de 3-5 V. Este pin se usa sólo para los puentes SF pull-up y de anulación predeterminada; En el raro caso de que no se utilice ninguna de esas funciones, el VDD se puede dejar desconectado. |
| IN2 | HIGH | El control de entrada lógica de OUT2. Se puede aplicar PWM a este pin (normalmente se hace con ambas líneas de desactivación inactivas). |
| IN1 | HIGH | El control de entrada lógica de OUT1. Se puede aplicar PWM a este pin (normalmente se hace con ambas líneas de desactivación inactivas). |
| PWM / D2 | LOW | Entrada de desactivación invertida: cuando D2 es bajo (LOW), OUT1 y OUT2 se configuran en alta impedancia. El ciclo de trabajo AD2 PWM del 70% da un ciclo de trabajo del motor del 70%. Normalmente, solo se utiliza uno de los dos pines de desactivación, pero el valor predeterminado es que ambos pines de desactivación estén activos. |
| PWM / D1 | HIGH | Deshabilitar entrada: cuando D1 es alto (HIGH), OUT1 y OUT2 se configuran en alta impedancia. Un ciclo de trabajo D1 PWM del 70% da un ciclo de trabajo del motor del 30%. Normalmente, solo se utiliza uno de los dos pines de desactivación, pero el valor predeterminado es que ambos pines de desactivación estén activos. |
| SF | HIGH | Salida de indicador de estado: un evento de sobrecorriente (cortocircuito) o sobretemperatura hará que SF se mantenga en estado bajo (LOW). Si cualquiera de los pines de desactivación (D1 o D2) desactiva las salidas, SF también estará bajo (LOW). De lo contrario, este pasador no se tira hacia arriba. Esto permite unir los dos pines SF de la placa y conectarlos a una única entrada MCU. |
| FB | LOW | La salida FB proporciona retroalimentación analógica de detección de corriente de aproximadamente 525 mV por amperio. |
| EN | LOW | Habilitar entrada: cuando EN es bajo (LOW), ambos circuitos integrados del controlador del motor están en modo de suspensión de corriente baja. |
| SLEW | LOW | Entrada de selección de velocidad de giro de salida. Un nivel bajo (LOW) lógico da como resultado un tiempo de aumento de salida lento (de 1,5 μs a 6 μs). Un nivel alto (HIGH) lógico selecciona un tiempo de aumento de salida rápido (0,2 μs a 1,45 μs). Este pin debe configurarse en alto (HIGH) para PWM de alta frecuencia (más de 10 kHz). Este pin determina el modo de velocidad de giro para ambos circuitos integrados del controlador del motor. |
| INV | LOW | Un valor lógico alto invierte el significado de IN1 e IN2 para ambos controladores de motor. |
En una aplicación típica, se utilizan cinco líneas de I/O para conectar cada canal del controlador del motor a un microcontrolador: las dos líneas de entrada, IN1 e IN2, para control de dirección, una de las líneas de desactivación, D1 o D2, para control de velocidad PWM, la salida de detección de corriente, FB, para monitorear el consumo de corriente del motor (conectada a una entrada del convertidor analógico a digital) y el indicador de estado, SF, para monitorear los errores del controlador del motor. Las líneas de control se pueden reducir a dos pines por canal si las señales PWM se aplican directamente a los dos pines de entrada con ambos pines de desactivación mantenidos inactivos. En cada uno de estos casos, las otras líneas no utilizadas deben configurarse para permitir un funcionamiento adecuado. Por ejemplo, si se usa D2 para la entrada PWM (como suele ser el caso), D1 debe mantenerse bajo para evitar que desactive el controlador del motor. La placa de circuito proporciona puntos de puente convenientes para anular los valores predeterminados del controlador del motor sin tener que conectar cables adicionales al módulo.
Las conexiones de detección de corriente y de indicador de estado son opcionales, aunque el monitoreo de los indicadores de estado puede permitir la detección de condiciones de falla enclavadas. Los indicadores de estado son salidas de drenaje abierto, por lo que los dos indicadores de estado se pueden conectar juntos para aplicaciones donde los pines de I/O son escasos y no es necesario determinar qué controlador de motor está experimentando una condición de falla.
Tenga en cuenta que el estado predeterminado del pin de habilitación, EN, es BAJO, lo que mantiene ambos chips del controlador del motor en un modo de suspensión de baja corriente. Deberá mantener este pin en alto (ya sea con una conexión externa o mediante el puente de anulación predeterminado al lado del pin) para permitir que la placa funcione.
El MC33926 tiene protección contra bajo voltaje, sobrecorriente y sobretemperatura. Algunos eventos de protección se indican mediante los pines del indicador de estado (SF), que son pines activos bajos que se pueden conectar a una sola entrada. Si el chip detecta un evento de sobrecorriente o sobretemperatura, el SF se bloquea en BAJO y OUT1 y OUT2 se configuran en alta impedancia. Para desbloquear el pin de la bandera de estado, alterne las líneas D1, D2, EN o VIN. La placa portadora tiene un MOSFET de protección inversa para mayor protección de los chips del controlador del motor.
La salida de detección de corriente es de aproximadamente 525 mV/A. Tenga en cuenta que la salida sólo está activa mientras el puente H correspondiente está funcionando; está inactivo (bajo) cuando el conductor está frenando o las salidas del motor son de alta impedancia (flotantes). Si el conductor está frenando, la corriente seguirá circulando a través del motor, pero el voltaje en el pin FB no reflejará con precisión la corriente del motor. Tenga en cuenta que, como la mayoría de los controladores de motor con detección de corriente integrada, la sensibilidad real puede variar significativamente de una unidad a otra y la precisión se reduce para corrientes inferiores a 0,5 A (consulte la hoja de datos MC33926 (pdf de 1 MB) para obtener más información). Considere nuestros sensores de corriente de efecto Hall como opciones para agregar una detección de corriente más consistente y precisa a su sistema.
El controlador de motor MC33926 utilizado en esta placa portadora tiene una clasificación de corriente máxima de 5 A continuos. Sin embargo, el chip por sí solo se sobrecalentará con corrientes más bajas. Por ejemplo, en nuestras pruebas a temperatura ambiente sin flujo de aire forzado, el chip pudo entregar 5 A durante 5 s y 4 A durante 18 s antes de que la protección térmica del chip comenzara a reducir la corriente. Una corriente continua de 3 A estaba justo en el umbral de sobretemperatura; en algunas pruebas, la protección térmica se activó después de un minuto, y en otras pruebas, el chip entregó 3 A durante más de cinco minutos sin activar la protección térmica. La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del portador está diseñada para extraer calor de los chips del controlador del motor, pero el rendimiento se puede mejorar agregando un disipador de calor. Nuestras pruebas se realizaron al 100% del ciclo de trabajo; Hacer PWM en el motor introducirá un calentamiento adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para provocar quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
A diferencia de otros puentes H, el 33926 tiene una característica que le permite reducir elegantemente la corriente cuando la corriente excede los 5 A o cuando la temperatura del chip se acerca a su límite. Esto significa que si empuja el chip cerca de su límite, verá menos potencia en el motor, pero podría permitirle evitar un apagado completo.
Se incluye un conector macho separable recto de 25 pines con la placa portadora dual MC33926, que se puede usar para conectar la PCB a placas perforadas o placas de pruebas. La placa también incluye tres bloques de terminales de 3,5 mm de 2 pines para realizar conexiones simples del motor.