$1,200.00 MXN (IVA Incluido)
Sin existencias
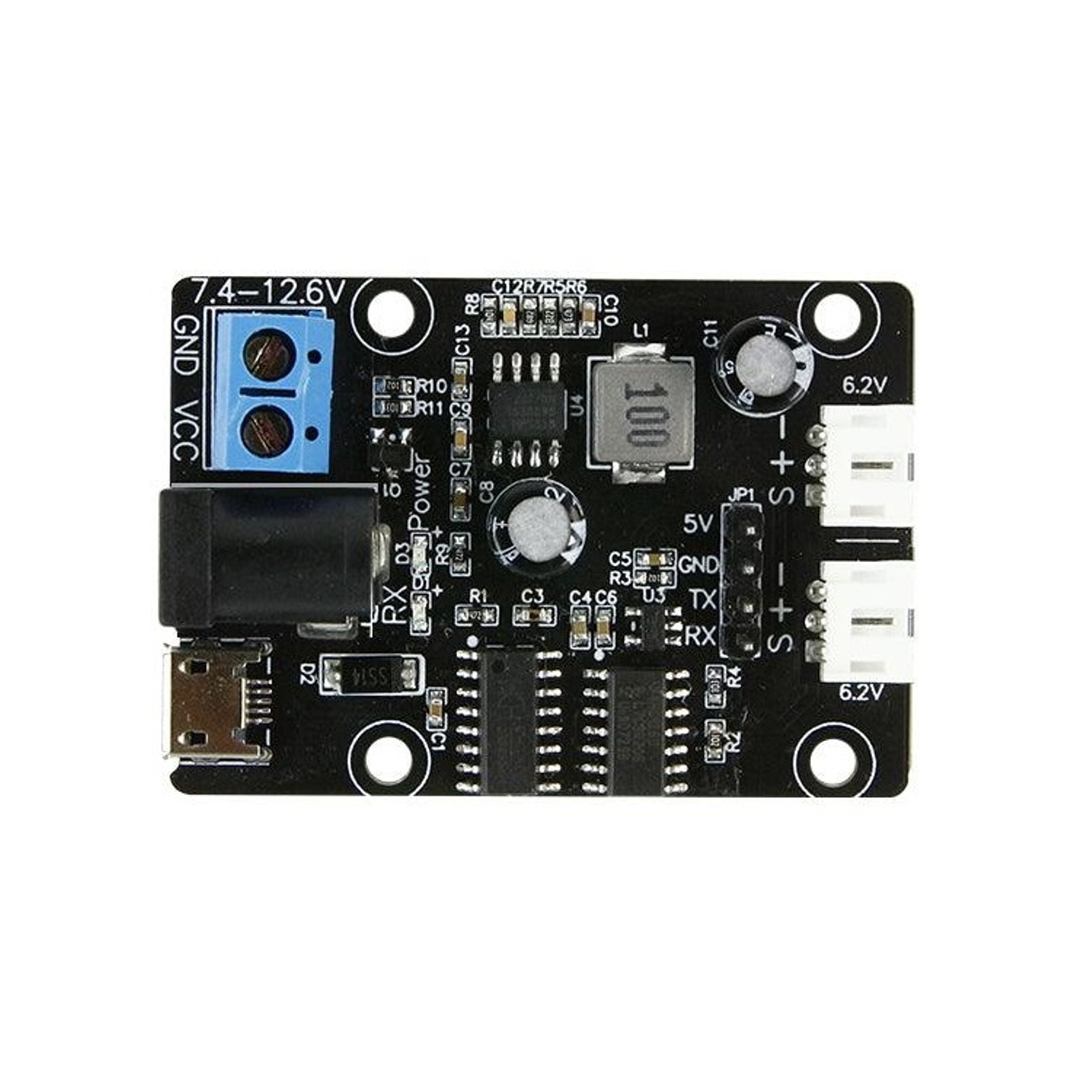
Este panel de soporte VNH5019 para el controlador del motor IC de ST opera desde 5.5 a 24V y puede entregar continuamente 12A (pico de 30A). Funciona con niveles lógicos de 2,5 a 5V, soporte ultrasónico (hasta 20 kHz) PWM, y cuenta con realimentación de detección de corriente (una tensión analógica proporcional a la corriente del motor). Junto con la protección incorporada contra inversión de voltaje, alto y bajo voltaje, sobre-temperatura, y sobrecargas de corriente, estas características hacen de este producto un gran controlador de motor multiusos.
Localización: D5
| Peso | 0.08 kg |
|---|---|
| Fabricante | Pololu |
| Descuento | 5 o más $1,140.00 |
Sin existencias
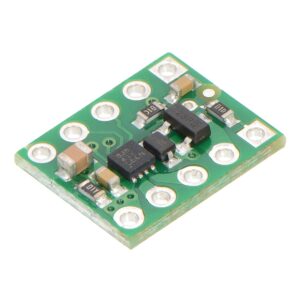
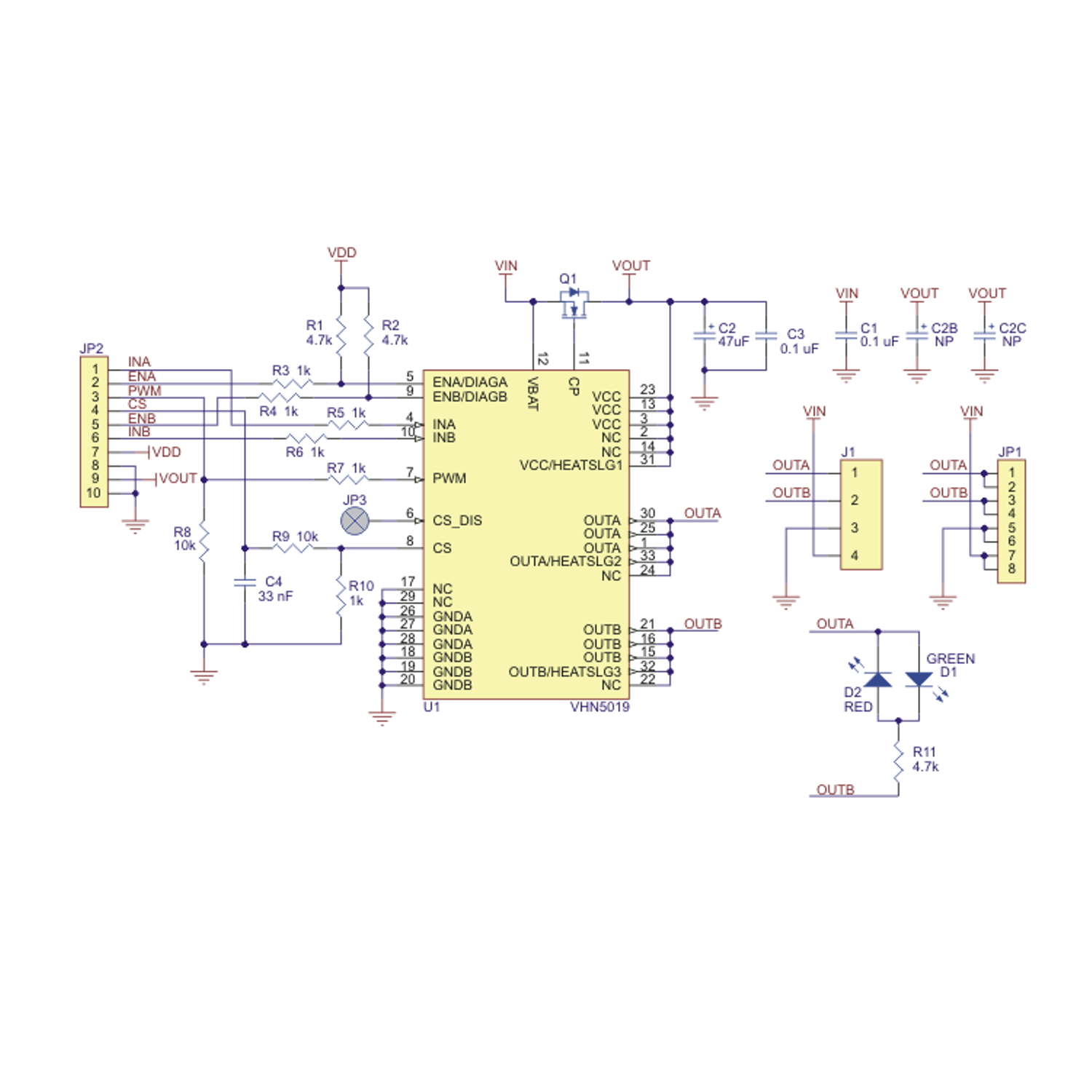
Este módulo es una placa de conexión compacta para el controlador de motor IC VNH5019 de alta potencia de ST, un puente H totalmente integrado que se puede utilizar para el control de velocidad bidireccional de un motor DC con una sola escobillas. El funcionamiento básico del controlador se resume a continuación, pero también recomendamos leer atentamente la hoja de datos del VNH5019 (475k pdf) antes de usar este producto. La placa incorpora la mayoría de los componentes del diagrama de aplicación típico en la página 14 de la hoja de datos VNH5019, incluidas resistencias pull-up y limitadoras de corriente y un FET para protección inversa de la batería. Se envía completamente equipado con sus componentes SMD, incluido el VNH5019, como se muestra en la imagen del producto.
1 Si bien la protección contra sobretensión generalmente se activa a 27 V, puede activarse a voltajes tan bajos como 24 V, por lo que no recomendamos usar este controlador de motor con baterías de 24 V, que exceden significativamente los 24 V cuando están completamente cargadas.
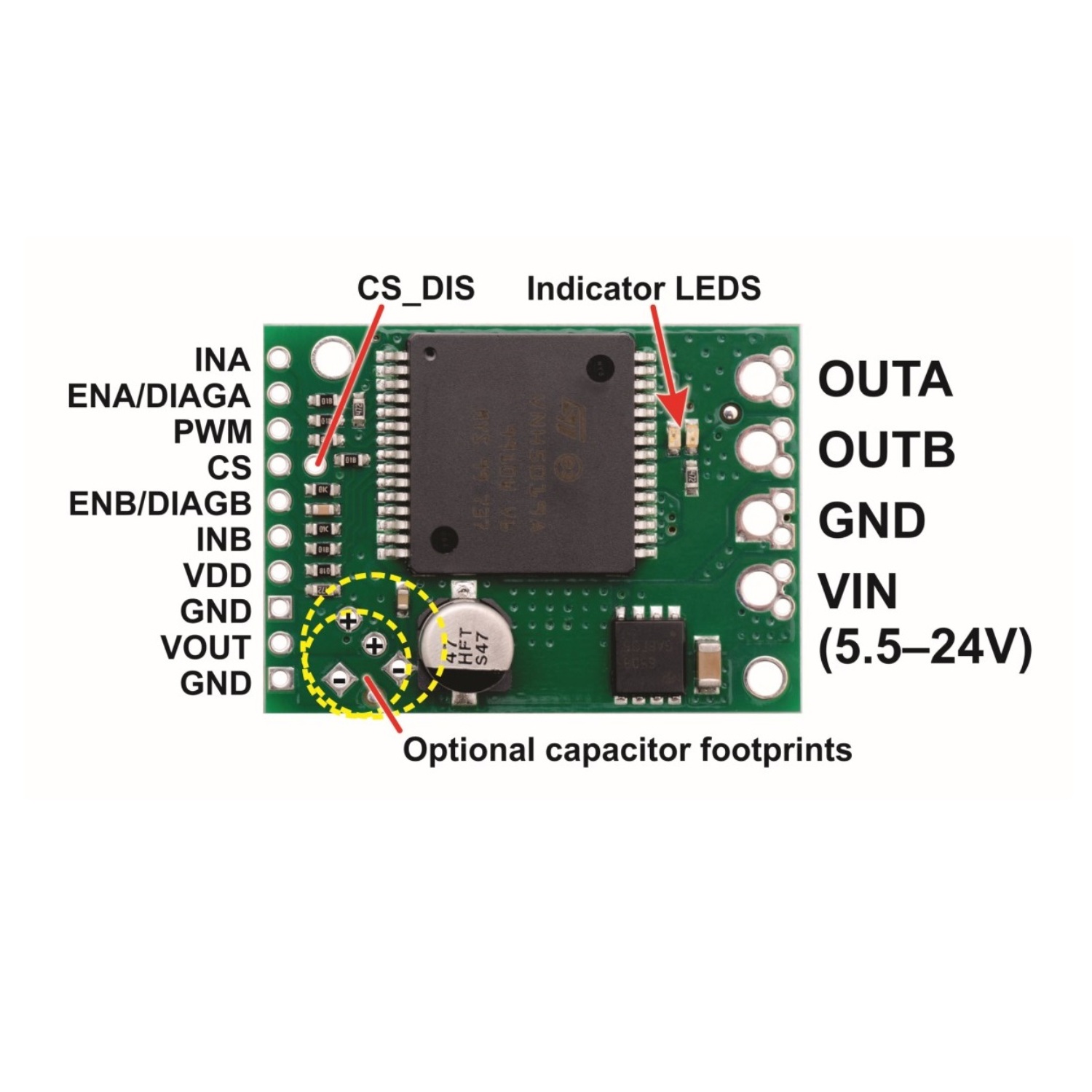
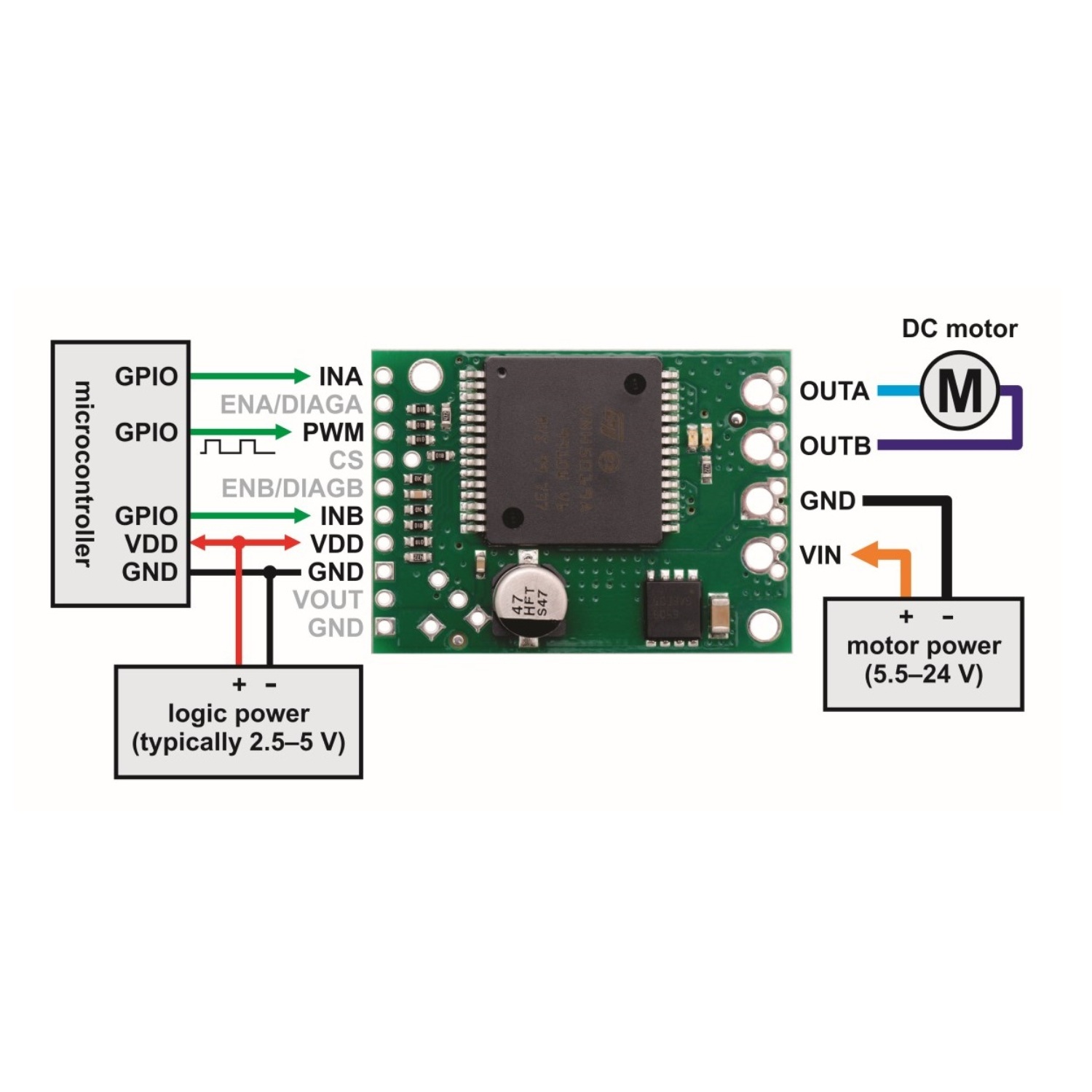
Las conexiones del motor y de alimentación del motor están en un lado del tablero y las conexiones de control están en el otro lado. La fuente de alimentación del motor se conecta a los pines grandes VIN y GND; debe estar entre 5,5 y 24 V y tener la capacidad de suministrar las corrientes potencialmente altas que requerirá el motor. La fuente de alimentación lógica (normalmente de 2,5 a 5 V) se conecta a los pequeños pads VDD y GND en el lado de control de la placa y se utiliza para alimentar los pull-ups internos en las líneas de habilitación ENA y ENB. Se garantiza que cualquier voltaje de entrada de control superior a 2,1 V será alto, por lo que este controlador se puede conectar directamente a sistemas de 3,3 y 5 V.
En esta configuración, la dirección del motor está determinada por los estados de los pines INA e INB y la velocidad del motor está controlada por el ciclo de trabajo de una señal PWM suministrada al pin PWM del controlador. El pin PWM está bajado en la placa, por lo que las salidas del controlador del motor están efectivamente desactivadas de forma predeterminada; los pines INA e INB están flotando (no están sujetos a ningún voltaje predeterminado en particular). Consulte las tablas de verdad en la hoja de datos VNH5019A-E para obtener más información sobre cómo los pines INA, INB y PWM afectan las salidas del controlador, OUTA y OUTB. Tenga en cuenta que también es posible guardar una línea de E/S del microcontrolador haciendo PWM directamente en los pines INA e INB mientras se mantiene el pin PWM en alto (por ejemplo, conectándolo directamente a VDD), pero la contrapartida es que esto solo funciona en niveles bajos. frecuencias (unos pocos cientos de Hertz o menos).
Esta placa cuenta con LED indicadores del motor que se pueden usar para probar que las salidas del controlador del motor funcionan como se espera antes de conectar un motor (esto puede ser especialmente útil para detectar problemas debido a fuentes de alimentación insuficientes). El brillo del LED aumenta con la velocidad del motor y el color del LED cambia con la dirección.
| PIN | Estado por default | Descripción |
| VIN | El punto de conexión para el lado positivo de la fuente de alimentación del motor de 5,5 – 24 V. Dado que la protección contra sobretensión puede ser tan baja como 24 V, no recomendamos utilizar baterías de 24 V para VIN. | |
| VDD | El punto de conexión para el lado positivo de la fuente de alimentación lógica (normalmente 2,5 – 5 V). La única función de este pin es alimentar los pull-ups internos en las dos líneas de habilitación, ENA y ENB. | |
| VOUT | Este pin le brinda acceso a la fuente de alimentación del motor después del MOSFET de protección de voltaje inverso (consulte el esquema de la placa a continuación). Se puede utilizar para suministrar energía con protección inversa a otros componentes del sistema, pero no se debe utilizar para corrientes elevadas. Este pin solo debe usarse como salida. | |
| GND | Puntos de conexión a tierra para fuentes de alimentación lógica y de motores. La fuente de control y el controlador del motor deben compartir una tierra común. | |
| OUTA | Salida del medio puente A (se conecta a un terminal de un motor DC). | |
| OUTB | Salida del medio puente B (se conecta a la otra terminal de un motor DC). | |
| PWM | LOW | Entrada de modulación de ancho de pulso: una señal PWM en este pin corresponde a una salida PWM en las salidas del motor. |
| INA | FLOAT | Entrada de dirección del motor A (Sentido “horario”). |
| INB | FLOAT | Entrada de dirección del motor B (Sentido “anti-horario”). |
| CS | Salida de detección actual. El voltaje del pin es aproximadamente 140 mV por amperio de corriente de salida cuando el pin CS_DIS está bajo o desconectado. La lectura del sensor actual es más precisa a corrientes más altas. El pin CS está diseñado para frecuencias PWM de 5 kHz o superiores. Si utiliza una frecuencia PWM inferior a 5 kHz y desea medir la corriente, le recomendamos agregar un condensador adicional entre el pin CS y GND para suavizar la señal. Por ejemplo, si usa una frecuencia PWM de 490 Hz y desea medir la corriente, debe agregar un capacitor de 1 µF (o más grande) entre CS y GND. (Tenga en cuenta que, si bien el voltaje CS puede exceder potencialmente los 3,3 V con corrientes altas, el circuito de detección de corriente debe ser seguro para su uso con muchas entradas analógicas de 3,3 V. La mayoría de las MCU tienen diodos de protección integrados que sujetarán el voltaje de entrada a un valor seguro y Dado que el circuito CS tiene una resistencia de 10 kΩ en serie con la salida, solo unos pocos cientos de microamperios como máximo fluirán a través de ese diodo). | |
| ENA/DIAGA | HIGH | Combinación de entrada de habilitación/salida de diagnóstico para el medio puente A. Cuando el controlador funciona normalmente, este pin actúa como una entrada de habilitación, con un medio puente A lógico alto que habilita y un medio puente A lógico bajo que deshabilita. Cuando falla un controlador ocurre, el IC baja este pin y el medio puente A se desactiva. Este pin está conectado a VDD a través de una resistencia pull-up en la placa. |
| ENB/DIAGB | HIGH | Combinación entrada habilitación/salida diagnóstico para medio puente B. Ver descripción de ENA/DIAGA. |
| CS_DIS | LOW | Desactiva la salida de detección de corriente, CS, cuando está alta. Se puede dejar desconectado en la mayoría de las aplicaciones. |
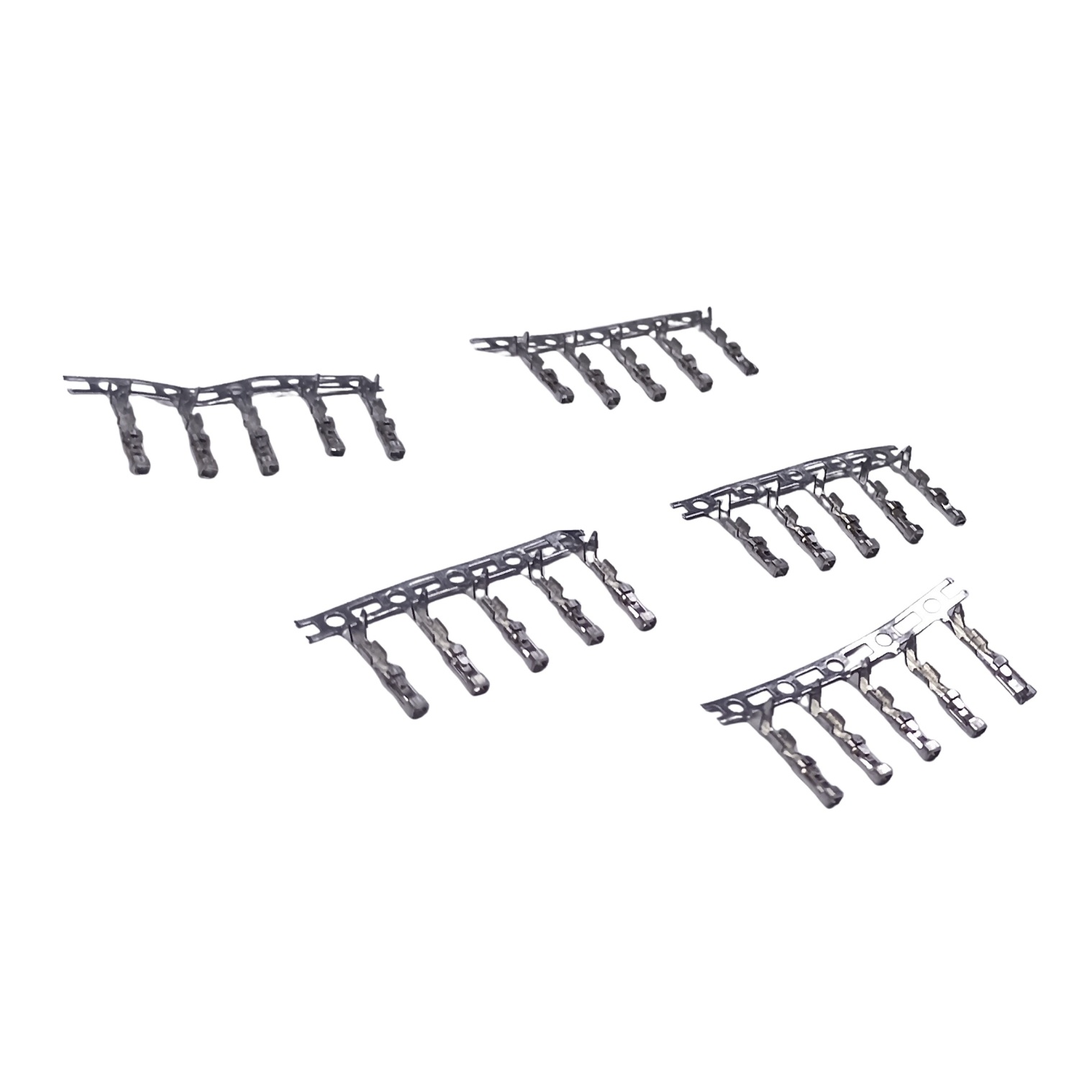
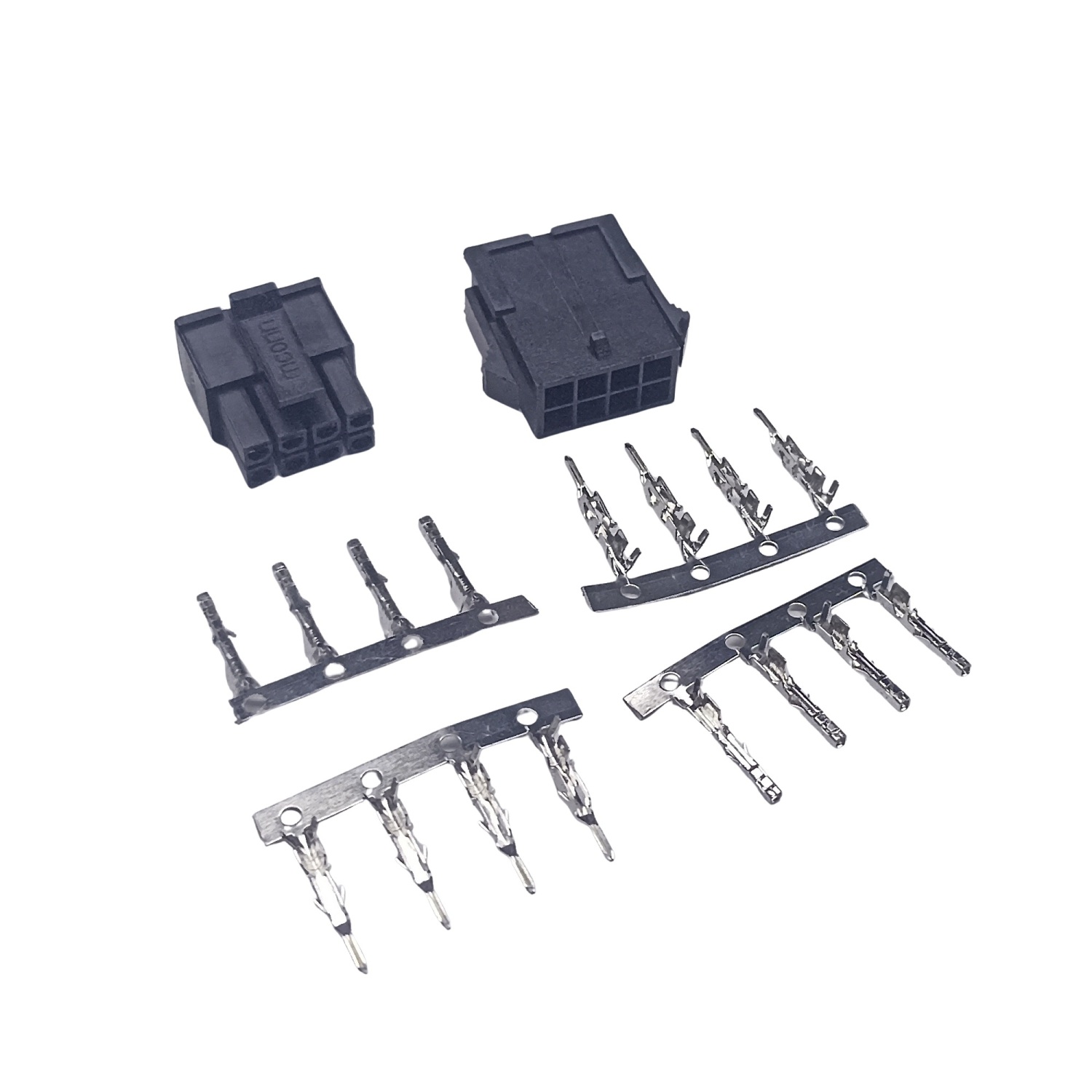
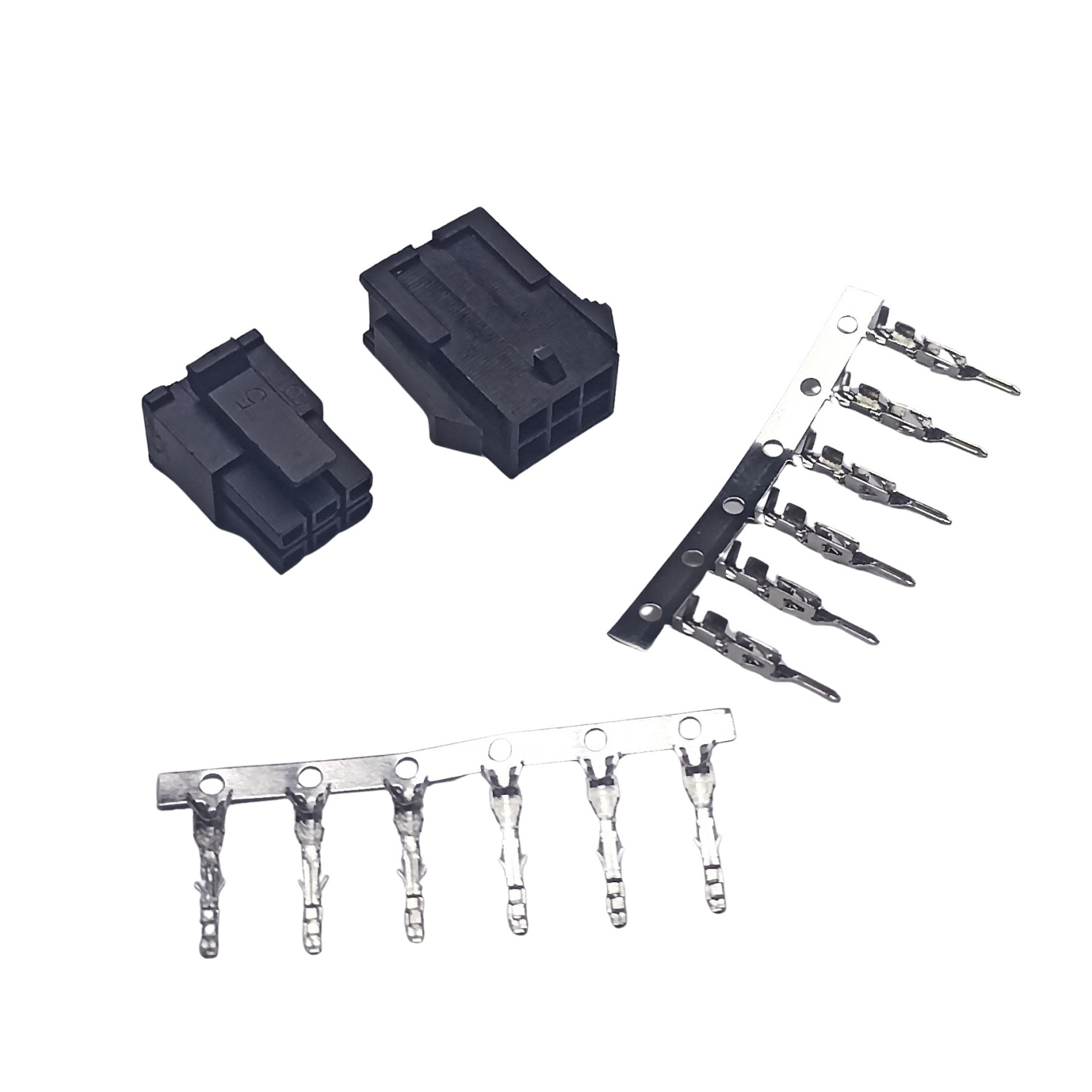
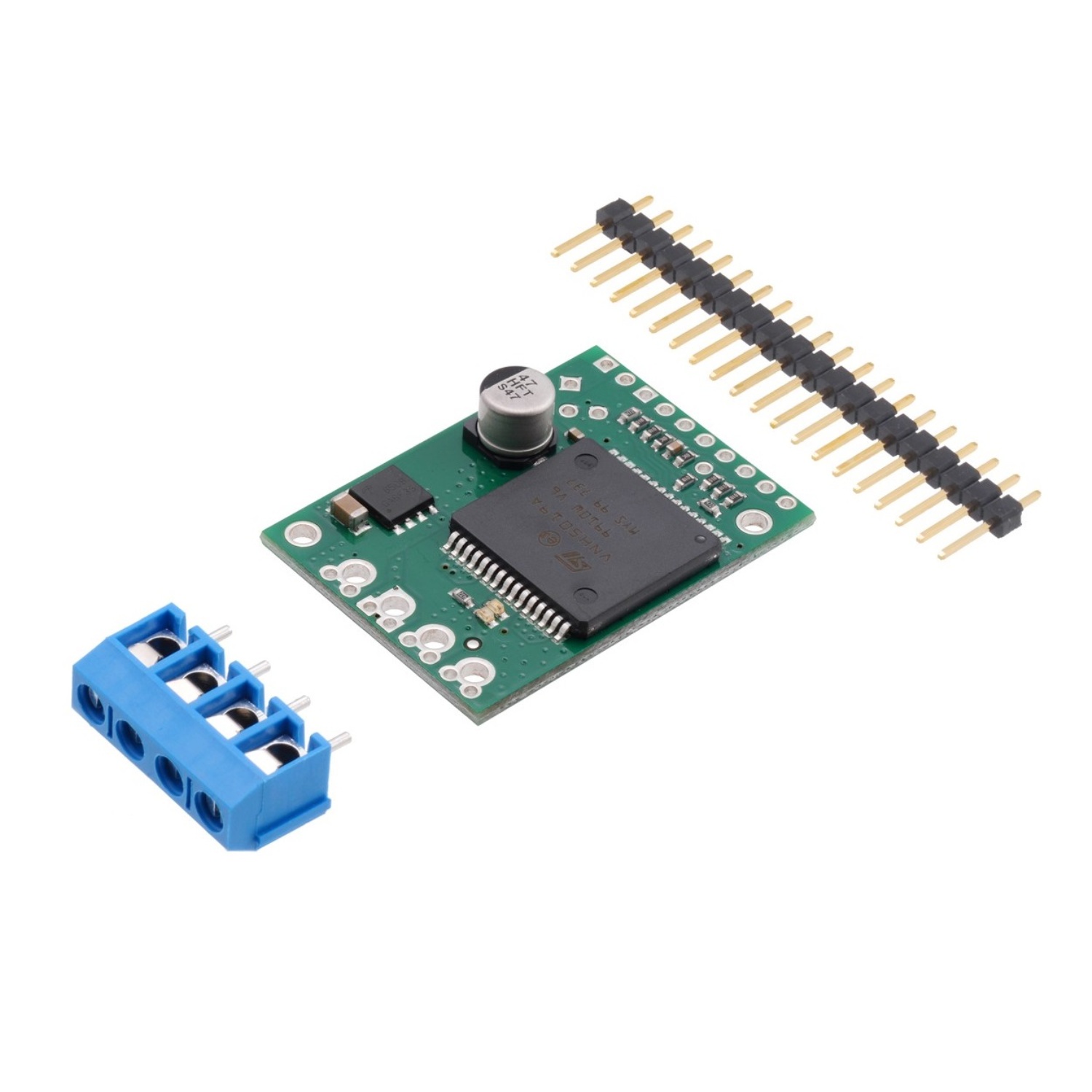
Con el controlador del motor se incluyen un cabezal macho separable recto de 20 pines de 0,1″ y dos bloques de terminales de 2 pines de 5 mm, como se muestra en la siguiente imagen. Puede usar los bloques de terminales para realizar las conexiones del motor y de la alimentación del motor, o puede romper una sección de 8 × 1 de la tira de cabezales de 0,1″ y soldarla en los orificios pasantes más pequeños que bordean los cuatro motores grandes y las almohadillas de alimentación del motor. . Sin embargo, tenga en cuenta que los bloques de terminales solo están clasificados para 16 A, y cada par de pines del cabezal solo está clasificado para 6 A combinados, por lo que para aplicaciones de mayor potencia, los cables gruesos deben soldarse directamente a la placa.
Soldar los cabezales de 0,1″ a las conexiones lógicas permite el uso con cables personalizados o placas de prueba sin soldadura (protoboard), o los cables se pueden soldar directamente a la placa para instalaciones más compactas. Las conexiones del motor y la alimentación del motor no deben realizarse a través de una placa de pruebas.
El controlador del motor incluye un condensador de potencia electrolítica de 47 uF y hay espacio para agregar condensadores adicionales (por ejemplo, para compensar cables de alimentación largos o aumentar la estabilidad de la fuente de alimentación). Por lo general, no se necesitan condensadores de potencia adicionales y no se incluyen condensadores adicionales con este controlador de motor.
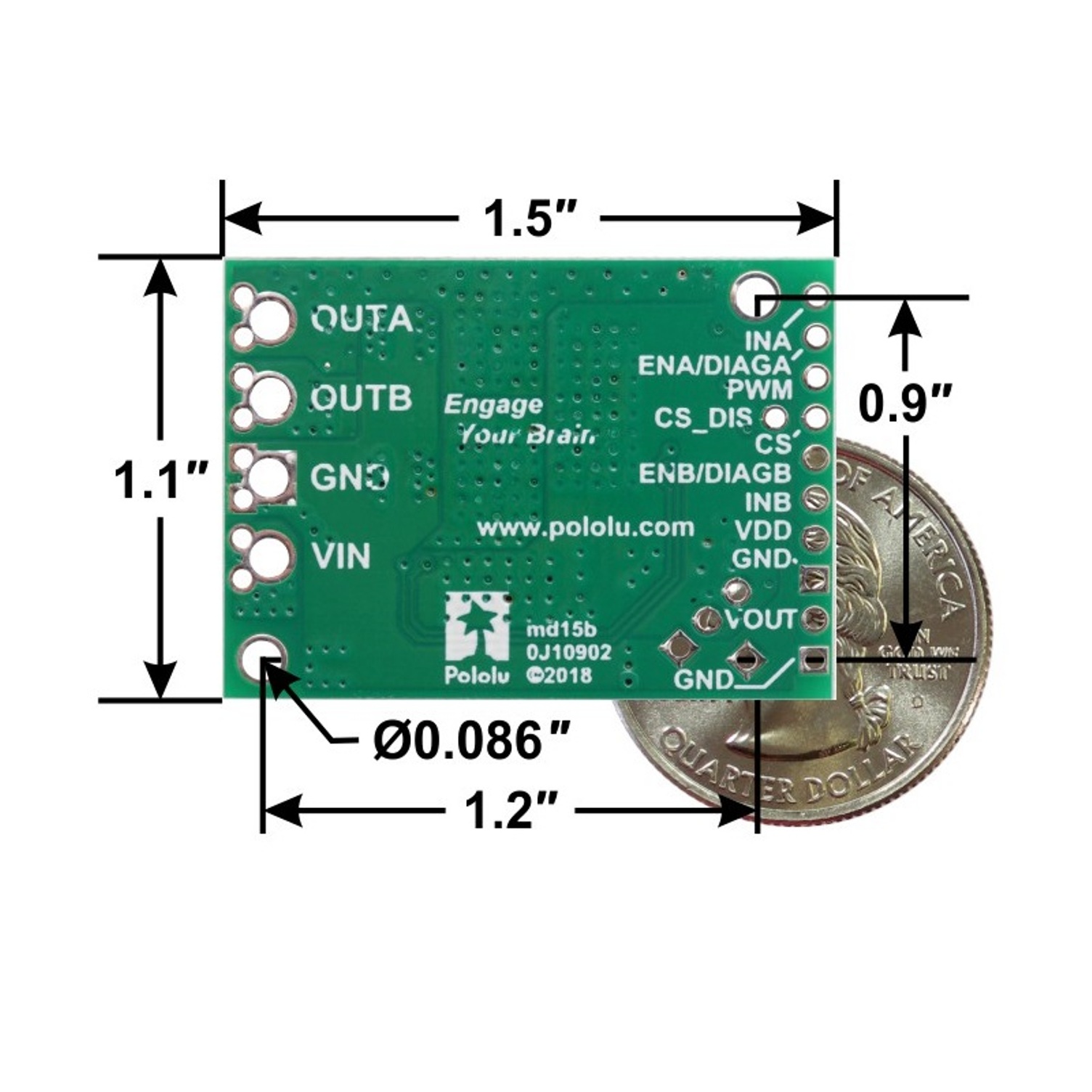
Los dos orificios de montaje están diseñados para usarse con tornillos #2 (no incluidos).
Este esquema también está disponible como PDF descargable (34k pdf)
Nota: Todas las placas enviadas desde Pololu antes del 28 de octubre de 2011 tienen resistencias de detección de corriente de 1,5 k (R10 en el esquema anterior), lo que da como resultado una salida de detección de corriente (CS) de aproximadamente 210 mV/A. Esa resistencia ahora se cambió a 1k para una mejor compatibilidad con sistemas de 3V, lo que produce una salida CS de aproximadamente 140 mV/A.
Además de este portador VNH5019, ofrecemos placas portadoras para dos controladores de motor más antiguos y similares de ST: el VNH3SP30 y el VNH2SP30. El VNH5019 es el único de los tres con un voltaje de funcionamiento práctico superior a 16 V y es el único que funciona con lógica de 3 V.
Los valores relacionados con la corriente en la siguiente tabla (es decir, las entradas a las que se aplica la nota al pie 3) son los resultados de pruebas en solo uno o dos de cada versión del controlador, por lo que no capturan la variación potencial de una unidad a otra. Como tales, los valores deben tratarse como estimaciones aproximadas del desempeño, no como garantías de desempeño. Si bien estas pruebas parecen indicar que el VNH2SP30 funciona un poco más frío (y por lo tanto puede entregar más corriente continua) que el VNH5019, es importante tener en cuenta que las tres versiones del controlador se probaron en diferentes momentos y en condiciones potencialmente diferentes, por lo que los resultados son indicaciones no necesariamente precisas del desempeño relativo.
En nuestras pruebas, notamos que la protección térmica en el VNH5019 se activaba a una temperatura más baja (153°C) que en el VNH2SP30 (170°C), lo que podría explicar en parte los tiempos de sobrecalentamiento más cortos del VNH5019. Sin embargo, también observamos que el VNH5019 alcanzaba temperaturas ligeramente más altas que el VNH2SP30 cuando se usaba en las mismas condiciones: el VNH5019 alcanzó una temperatura de 85°C después de 3 minutos a 10 A, mientras que el VNH2SP30 alcanzó una temperatura de 80°C.
La siguiente tabla ofrece una comparación de los tres controladores:
| VNH3SP30 | VNH2SP30 | VNH5019 | |
| Voltaje de operación: (1) | 5.5 – 16 V (2) | 5.5 – 16 V | 5.5 – 24 V |
| Resistencia MOSFET (por tramo): | 34 mΩ típico. | 19 mΩ max. | 18 mΩ típico. |
| Máxima frecuencia PWM | 10 kHz | 20 kHz | 20 kHz |
| Percepción de corriente | n/a | 0.13 V/A típico. | 0.14 V/A típico. |
| Apagado por sobretensión | 36 V min. (2) / 43 V typ. | 16 V min. / 19 V típico. | 24 V min. / 27 V típico. |
| Umbral alto de entrada lógica | 3.25 V min. | 3.25 V min. | 2.1 V min. |
| Tiempo de sobrecalentamiento a 20A (3) | 8 s | 35 s | 20 s |
| Tiempo de sobrecalentamiento a 15A (3) | 30 s | 150 s | 90 s |
| Tiempo de ejecución infinito actual (3) | 9 A | 14 A | 12 A |
1 El VNH3SP30 puede soportar voltajes de entrada de hasta 40 V, y el VNH2SP30 y el VNH5019 pueden soportar voltajes de entrada de hasta 41 V, pero el apagado por sobretensión se activará con voltajes más bajos.
2 Si bien el apagado por sobretensión del VNH3SP30 no se activa hasta los 36 V, en nuestra experiencia, las corrientes de disparo hacen que la operación PWM no sea práctica por encima de los 16 V.
3 Resultados típicos utilizando las placas portadoras de controladores de motor Pololu con un ciclo de trabajo del 100 % a temperatura ambiente (sin flujo de aire forzado ni disipación de calor más allá de la PCB portadora).
El CI del controlador del motor tiene una clasificación de corriente continua máxima de 30 A. Sin embargo, los chips por sí solos se sobrecalentarán con corrientes más bajas (consulte la tabla anterior para conocer los valores típicos). La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del portador está diseñada para extraer calor de los chips del controlador del motor, pero el rendimiento se puede mejorar agregando un disipador de calor. En nuestras pruebas, pudimos ofrecer duraciones cortas (del orden de milisegundos) de 30 A y varios segundos de 20 A sin sobrecalentamiento. A 6 A, el chip apenas se calienta al tacto. Para instalaciones de alta corriente, los cables del motor y de la fuente de alimentación también deben soldarse directamente en lugar de pasar por los bloques de terminales suministrados, que tienen una capacidad nominal de hasta 16 A.
Este producto puede calentarse lo suficiente como para provocar quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Muchos controladores de motor o controladores de velocidad pueden tener clasificaciones de corriente máxima que son sustancialmente más altas que la clasificación de corriente continua; este no es el caso de estos controladores de motor, que tienen una clasificación continua de 30 A y una protección contra sobrecorriente que puede activarse a tan solo 30 A (50 A típico). Por lo tanto, la corriente de calado de su motor no debe ser superior a 30 A. (Incluso si espera funcionar con una corriente promedio mucho más baja, el motor aún puede consumir ráfagas cortas de corrientes altas, como cuando está arrancando, si es especial). no se toman medidas.)
Nota: La hoja de datos se refiere al IC del controlador del motor con el número de pieza completo VNH5019A-E, pero la «A» parece indicar simplemente que estaba empaquetado en tubos. Menciona VNH5019TR-E como otro número de pieza válido para este IC (que indica el embalaje de cinta y carrete).