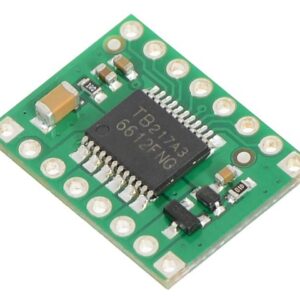
El controlador DRV8801 de Texas Instruments es un pequeño circuito integrado puente H que se puede utilizar para el control bidireccional de un motor de DC con escobillas únicas de 8V a 36V. Puede suministrar hasta aproximadamente 1A de forma continua y puede tolerar corrientes máximas de hasta 2,8A durante unos segundos, lo que lo convierte en una buena opción para motores pequeños que funcionan con una amplia gama de voltajes. Dado que esta placa es portadora del DRV8801, recomendamos leer atentamente la hoja de datos del DRV8801. La placa se envía equipada con todos sus componentes SMD, incluido el DRV8801.
Características:
- Impulsa un único motor de DC con escobillas
- Tensión de alimentación del motor: 8V a 36V
- Tensión de alimentación lógica: 3,3V a 6,5V
- Corriente de salida: 1A continuo (2,8A pico)
- La interfaz simple requiere solo dos líneas de I/O (una para dirección y otra para velocidad)
- Salida de detección de corriente proporcional a la corriente del motor (aprox. 500mV por A)
- Las entradas son compatibles con 3V y 5V
- Bloqueo de bajo voltaje y protección contra sobrecorriente y sobretemperatura.
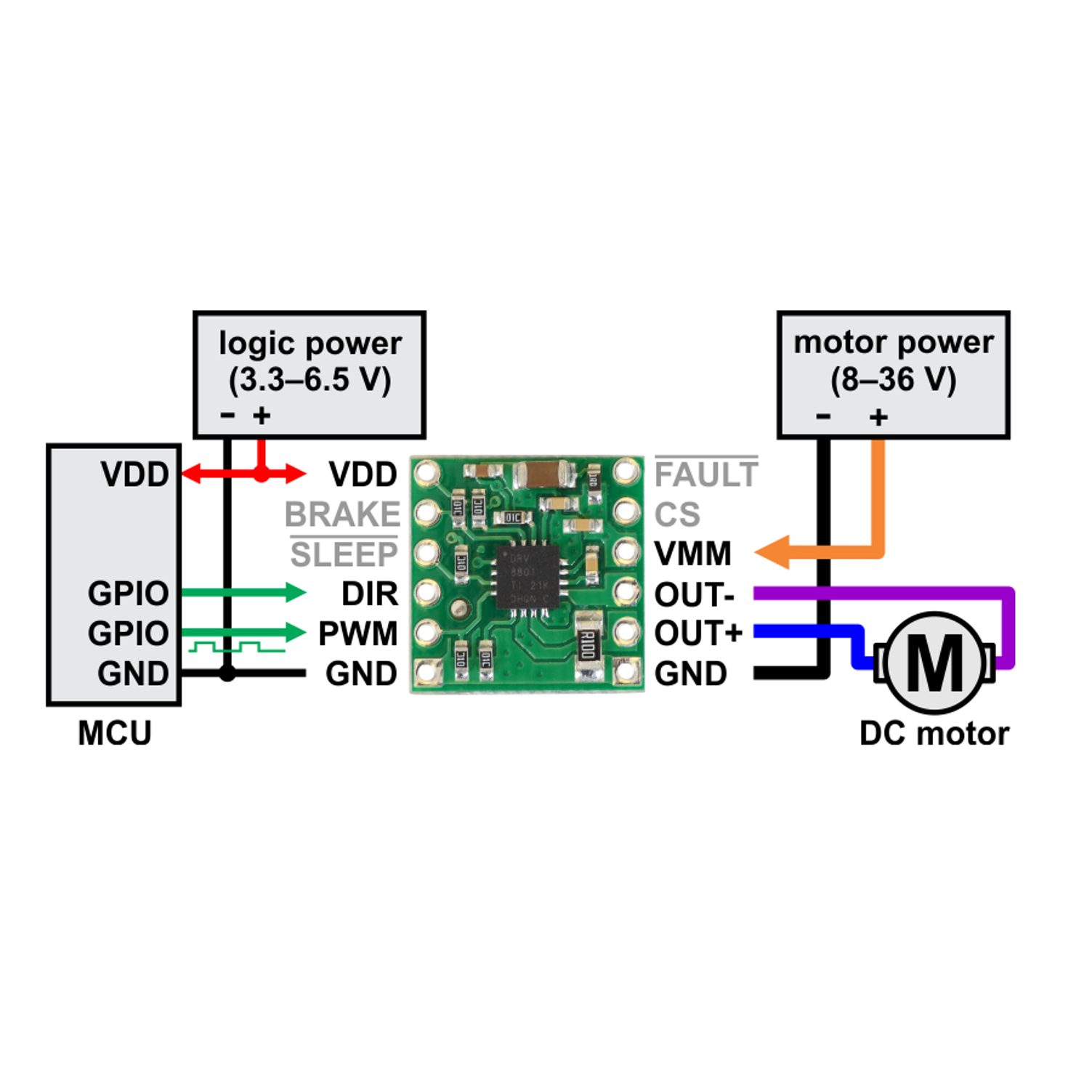
Usando el controlador del motor
En una aplicación típica, las conexiones de alimentación se realizan en un lado de la placa y las conexiones de control en el otro. Aparte de las conexiones del motor y la alimentación, los únicos pines necesarios son DIR y PWM (llamados PHASE y ENABLE en la hoja de datos del DRV8801, respectivamente). Se puede aplicar una señal PWM al pin PWM/ENABLE para lograr un control de velocidad variable en la dirección determinada por el estado del pin DIR/PHASE. La placa baja el PWM de forma predeterminada, por lo que el controlador solo se habilita cuando este pin recibe una señal alta. El pin DIR no tiene un estado predeterminado definido, lo que significa que las salidas podrían comportarse de manera errática si el pin DIR se deja desconectado mientras el pin PWM está alto.
El pin BRAKE determina si el motor frena o se detiene cuando el pin PWM está bajo (este pin se llama MODE1 en la hoja de datos DRV8801). La placa portadora lo eleva, lo que corresponde al frenado (ambas salidas del motor están en cortocircuito a tierra). Al configurar el pin BRAKE en nivel bajo, las salidas se ponen en inercia siempre que el pin PWM esté en nivel bajo (ambas salidas del motor están apagadas). Generalmente recomendamos dejar este valor alto mientras se suministra una señal PWM al pin PWM para obtener la operación de freno de accionamiento (o «decaimiento lento»), ya que esto generalmente proporciona una relación más lineal entre el ciclo de trabajo de PWM y la velocidad del motor que el accionamiento de inercia ( o “decaimiento rápido”), y puede resultar en un mejor rendimiento en ciclos de trabajo bajos. La siguiente tabla de verdad muestra cómo los pines PWM, DIR y BRAKE afectan las salidas del controlador:
| DRV8801 Truth Table |
| PWM/ENABLE |
DIR/PHASE |
BRAKE/MODE1 |
OUT+ |
OUT- |
Modo de Operación |
| PWM |
1 |
1 |
PWM (H/L) |
L |
avance/freno a velocidad PWM % |
| PWM |
0 |
1 |
L |
PWM (H/L) |
reversa/freno a velocidad PWM % |
| L |
X |
1 |
L |
L |
Freno bajo (salidas en cortocircuito a tierra) |
| PWM |
1 |
0 |
PWM (H/OPEN) |
PWM (L/OPEN) |
avance/inercia a velocidad PWM % |
| PWM |
0 |
0 |
PWM (L/OPEN) |
PWM (H/OPEN) |
reversa/inercia a velocidad PWM % |
| L |
X |
0 |
OPEN |
OPEN |
inercia (salidas apagadas) |
Nota: Al frenar, el controlador frena bajo porque el pin MODE2 del DRV8801 está bajado en la placa . El pin MODE2 no está expuesto al usuario.
El pin SLEEP se coloca en lo alto de la placa a través de una resistencia de 10 k y se puede dejar desconectado si no desea utilizar el modo de suspensión de bajo consumo del DRV8801.
El pin FAULT es una salida de drenaje abierto que el chip reduce cuando ocurre una condición de sobrecorriente, sobretemperatura o bajo voltaje. La placa portadora incluye una resistencia pull-up en este pin, por lo que no es necesario un pull-up externo. Tenga en cuenta que el pin FAULT es una señal de solo estado que no afecta la funcionalidad del dispositivo, por lo que una señal de FAULT baja no significa necesariamente que las salidas del controlador estén deshabilitadas. Por ejemplo, el controlador comenzará a funcionar normalmente una vez que el voltaje de suministro del motor sea superior a 8 V, pero la salida de FAULT será baja hasta que el voltaje de suministro del motor alcance aproximadamente 12 V. Consulte la hoja de datos para obtener más información sobre cómo responde el DRV8801 y reporta fallas.
El pin CS genera un voltaje analógico proporcional a la corriente del motor (aproximadamente 500 mV por A).
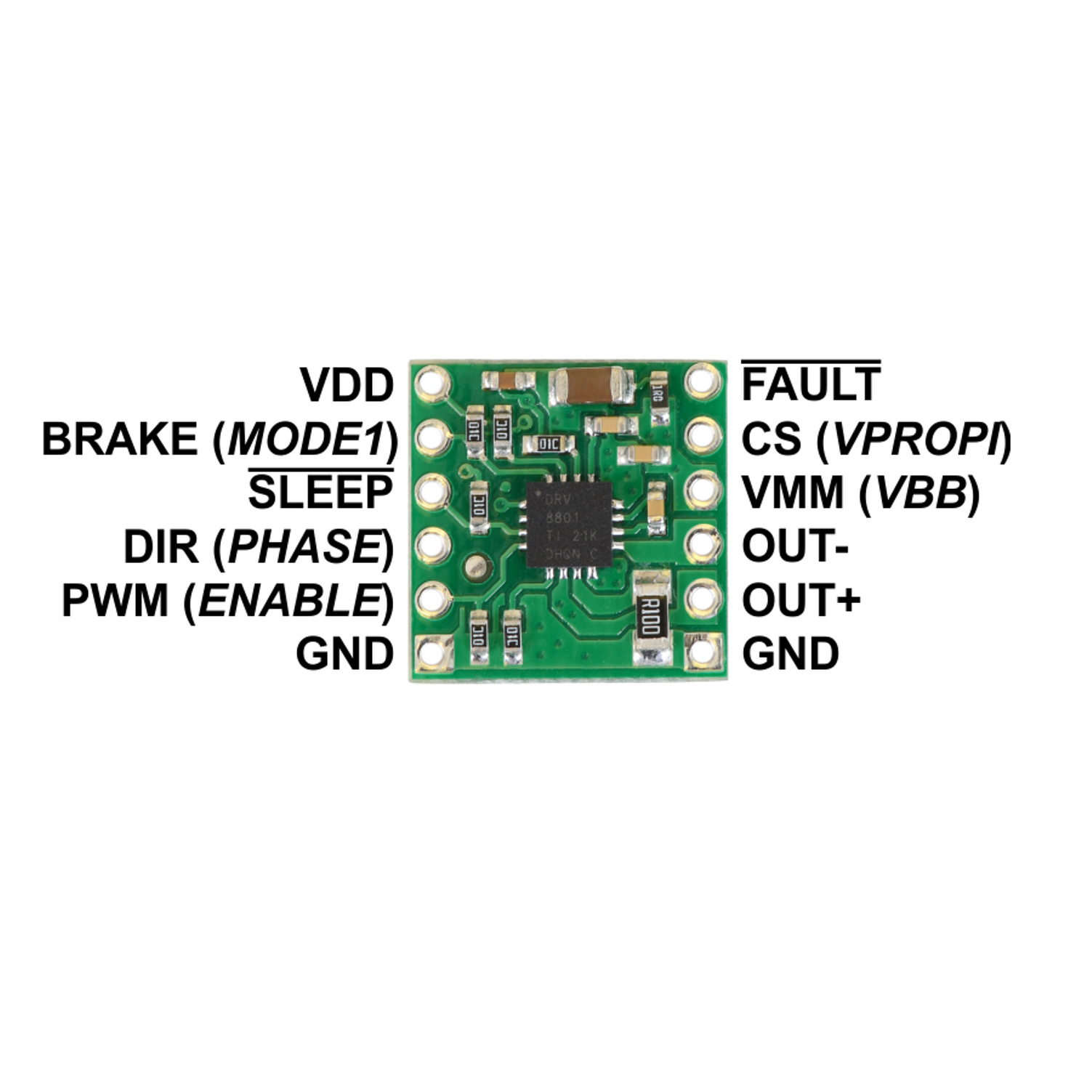
Configuración de Pines
| PIN |
Estado por default |
Descripción |
| VMM/VBB |
|
Conexión de alimentación del motor de 8V a 36V. Este pin se llama VBB en la hoja de datos del DRV8801. |
| VDD |
|
Conexión de alimentación lógica de 3,3V a 6,5 V. Este pin solo se usa para alimentar las resistencias pull-up de FAULT, SLEEP y BRAKE en la placa. (El DRV8801 tiene su propio regulador de voltaje lógico interno). |
| GND |
|
Puntos de conexión a tierra para las fuentes de alimentación del motor y lógica. La fuente de control y el controlador del motor deben compartir una tierra común. |
| OUT+ |
|
Salida del puente H +. |
| OUT- |
|
Salida del puente H -. |
| DIR/PHASE |
undefined |
Entrada lógica para controlar la dirección del motor. |
| PWM/ENABLE |
LOW |
Entrada lógica para habilitar las salidas del controlador/controlar la velocidad del motor. Se puede aplicar una señal PWM a este pin. |
| BRAKE/MODE1 |
HIGH |
Entrada lógica para controlar si el conductor frena bajo o se mueve por inercia cuando el pin PWM está bajo. Una lógica alta da como resultado un frenado (decaimiento lento a través del suelo). |
| SLEEP |
HIGH |
Entrada lógica que pone el DRV8801 en modo de suspensión de bajo consumo cuando el nivel de energía es bajo. |
| FAULT |
|
Salida lógica que baja cuando ocurre una falla. La placa lleva este pin hasta VDD. |
| CS/VPROPI |
|
Salida de tensión analógica proporcional a la corriente del motor (500 mV por A). Nota: este pin generará 0 V siempre que el controlador esté en modo de caída lenta, es decir, cuando BRAKE/MODE1 esté alto (HIGH). |
Consideraciones sobre la disipación de energía en el mundo real
La hoja de datos del DRV8801 recomienda una corriente continua máxima de 2,8 A. Sin embargo, el chip por sí solo se sobrecalentará con corrientes más bajas. Por ejemplo, en nuestras pruebas a temperatura ambiente sin flujo de aire forzado, el chip pudo suministrar 2,8 A durante unos segundos, 1,4 A durante aproximadamente 30 s y 1,2 A durante casi dos minutos antes de que se activara la protección térmica del chip. Una corriente continua de 1 A por canal fue sostenible durante muchos minutos sin provocar un apagado térmico. La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del portador está diseñada para extraer calor del chip del controlador del motor, pero el rendimiento se puede mejorar agregando un disipador de calor. Nuestras pruebas se realizaron al 100% del ciclo de trabajo; Hacer PWM en el motor introducirá un calentamiento adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para provocar quemaduras antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
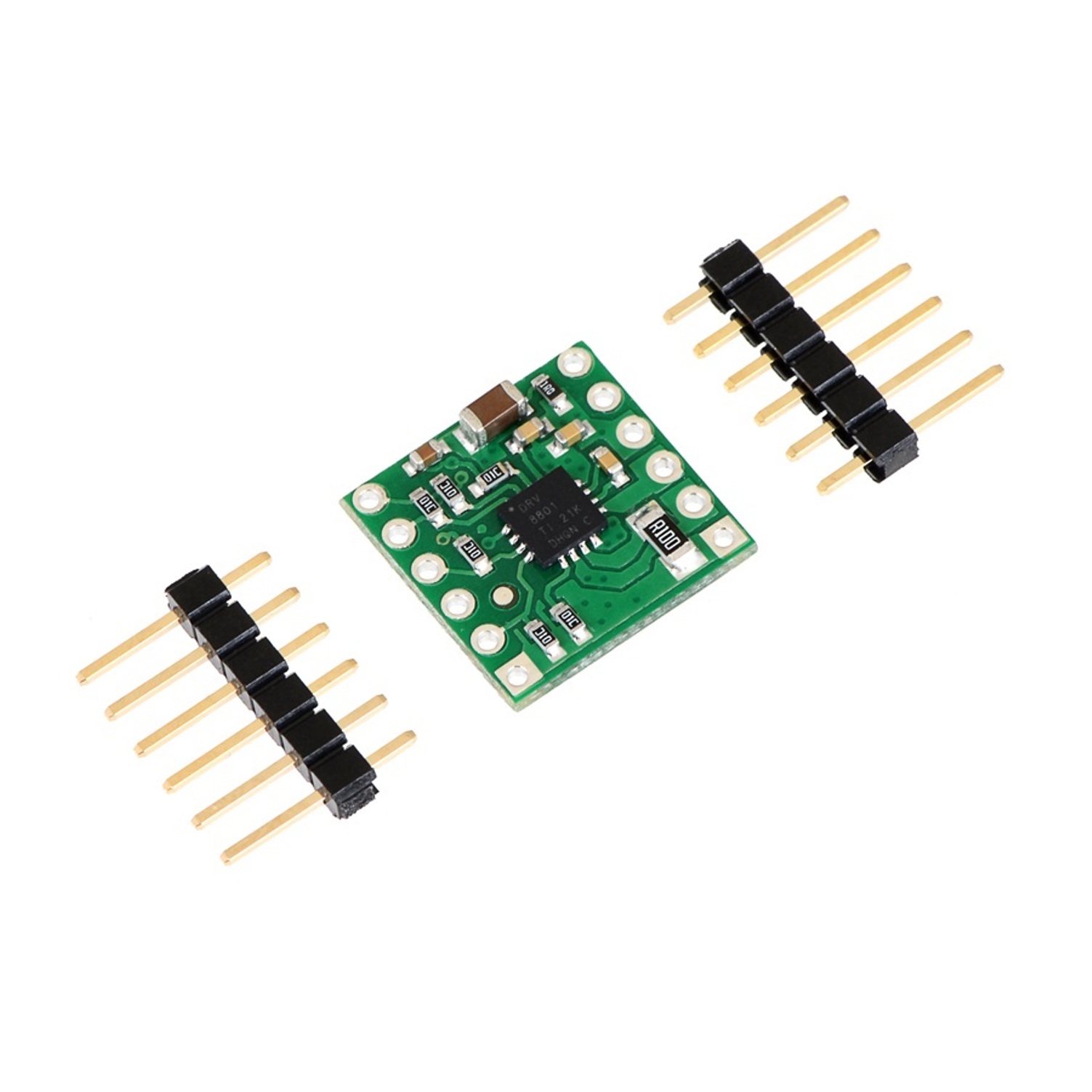
Hardware incluido
Los cabezales macho separables de 0,1″ se incluyen con el soporte del controlador del motor DRV8801, que se pueden soldar para usar el controlador con placas perforadas, placas de prueba o conectores hembra de 0,1″. (Los encabezados pueden enviarse como una sola tira más grande que se puede dividir en pedazos más pequeños). La imagen de arriba a la derecha muestra las dos posibles orientaciones de la placa cuando se usan con estos pasadores del encabezado (partes visibles o serigrafía visible). También puede soldar los cables del motor y otras conexiones directamente a la placa, o puede usar bloques de terminales de 0,1 ″ (no incluidos) para permitir conexiones temporales fáciles:
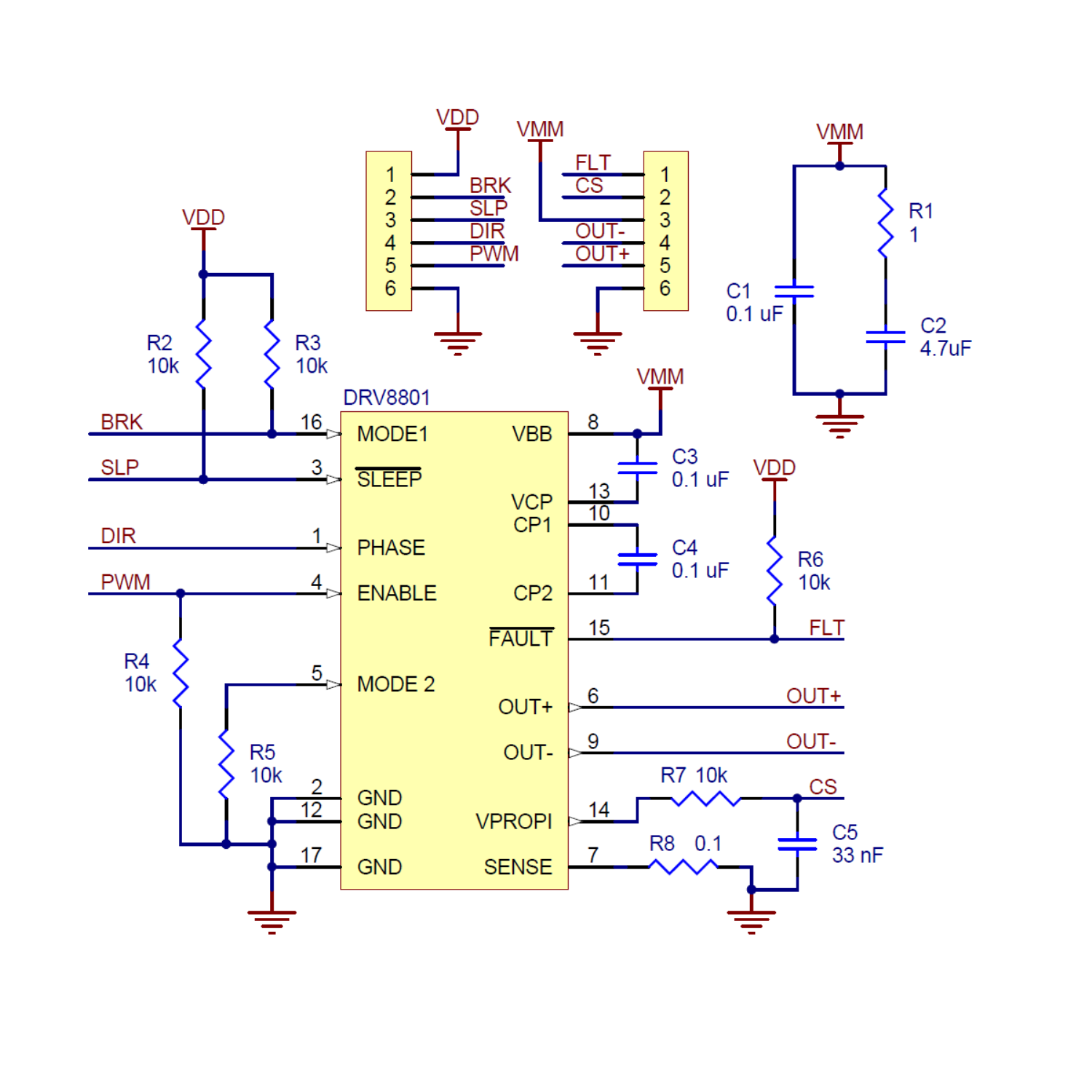
Esquemático
Este esquema también está disponible como pdf descargable (157k pdf)