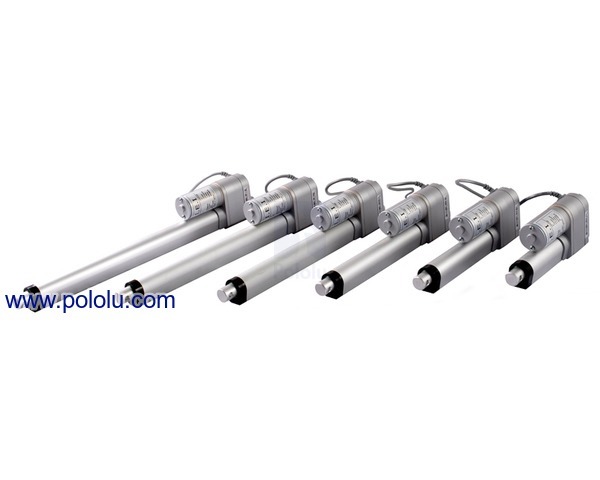



La serie de actuadores lineales LD de Concentric International (anteriormente Iowa Export-Import) son motorreductores de DC de 12V, que utilizan un tornillo sin fin para mover un eje hacia adelante y hacia atrás a lo largo de su longitud. El tornillo sin fin garantiza que el eje mantendrá su posición incluso cuando no esté accionado. Dos interruptores de límite detienen de forma segura el motor en cada extremo de su rango, mientras que los diodos integrados le permiten invertir la dirección después de alcanzar un punto límite si se invierte el voltaje suministrado. Los actuadores son en su mayoría metálicos y toda la carcasa está sellada para protegerlos contra el polvo y el agua (clasificación IP63).
Los actuadores lineales Concentric de la serie LD están disponibles en una variedad de longitudes y con potenciómetros opcionales que están vinculados a la posición del eje, para su uso en sistemas de retroalimentación. También están disponibles varias longitudes en dos relaciones de transmisión: 5:1 y 20:1. Las versiones 5:1 tienen índices de carga más bajos (34 libras dinámicas, 450 libras estáticas), pero permiten velocidades más altas, hasta 1,7 pulg/s. Las versiones 20:1 son más lentas (hasta 0,5 pulg/s), pero están clasificadas para cargas dinámicas de hasta 110 libras y cargas estáticas de hasta 500 libras.
| Longitud de la carrera | 20:1 | 20:1 Con retroalimentación | 5:1 | 5:1 Con retroalimentación |
| 2″ | LACT2-12V-20 | LACT2P-12V-20 | ||
| 4″ | LACT4-12V-20 | LACT4P-12V-20 | LACT4-12V-5 | LACT4P-12V-5 |
| 6″ | LACT6-12V-20 | LACT6P-12V-20 | ||
| 8″ | LACT8-12V-20 | LACT8P-12V-20 | ||
| 10″ | LACT10-12V-20 | LACT10P-12V-20 | ||
| 12″ | LACT12-12V-20 | LACT12P-12V-20 | LACT12-12V-5 | LACT12P-12V-5 |
Hay brackets de montaje disponibles para fijar los actuadores a una estructura; Considere que se requieren dos para cada actuador (uno por cada extremo).
Para probar el actuador, simplemente conecte una fuente de alimentación de hasta 12V a los cables del motor. Invertir el voltaje aplicado invertirá la dirección del movimiento. Se requiere un controlador de motor o driver para el control electrónico de velocidad y dirección. Recomendamos el controlador de motor Jrk para usar con los actuadores de retroalimentación, aunque muchos de nuestros otros controladores de motor y controladores de motor son capaces de alimentar este actuador.
Estos actuadores tienen una corriente de bloqueo de 10A a 12V, pero, en promedio, consumirán mucho menos cuando se usan dentro de sus clasificaciones de carga. Consumen alrededor de 500 mA sin carga y pueden superar los 3 A en su carga dinámica nominal máxima, por lo que hemos descubierto que generalmente funcionan bien con el controlador de motor jrk 21v3 de menor potencia con retroalimentación (consulte la parte inferior de esta página para obtener más información sobre el uso). Este driver para el control de posición del actuador lineal de circuito cerrado). Sin embargo, tenga en cuenta que los actuadores pueden acercarse brevemente a su corriente de pérdida total cuando se arrancan abruptamente o en un cambio repentino de dirección. Estos picos de corriente se pueden amortiguar si se toman medidas para limitar la aceleración del actuador (muchos de nuestros controladores de motor ofrecen limitación de aceleración opcional).
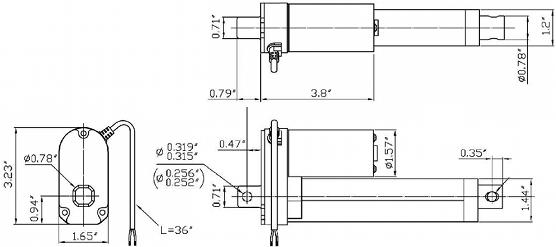
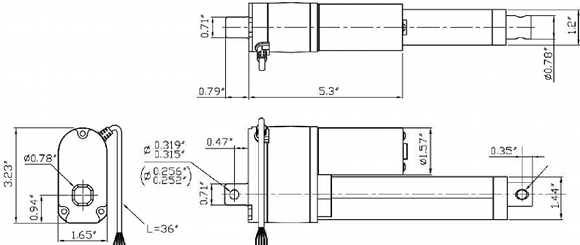
 |
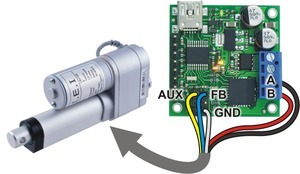
| Diagrama de los actuadores lineales Concentric LD con retroalimentación. |
|---|
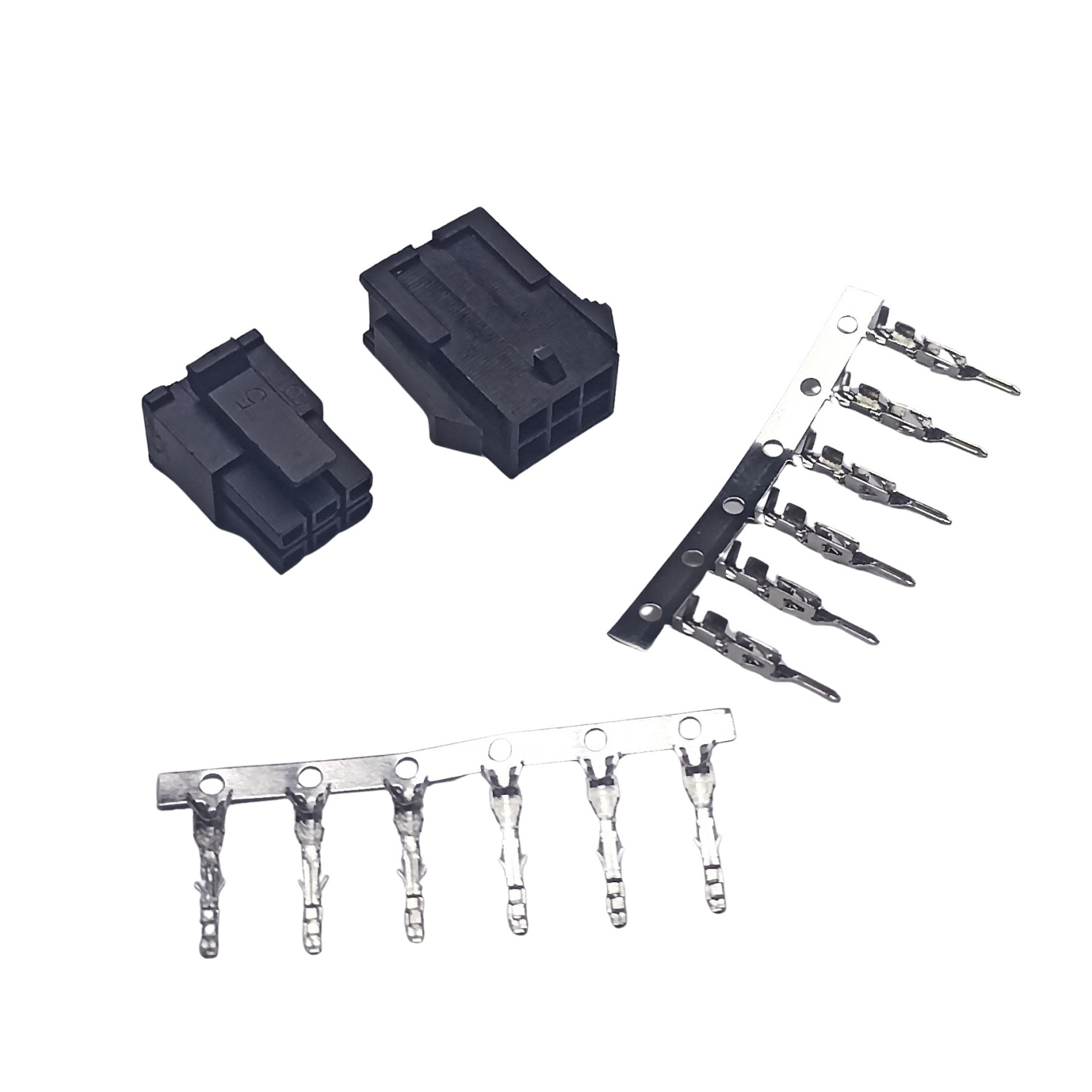
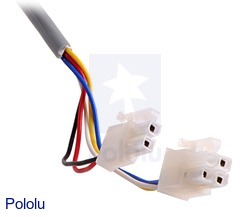
Cada actuador tiene un cable de 3 pies de largo. En actuadores con retroalimentación, este cable termina con conectores hembra especiales como se muestra en la imagen de la izquierda a continuación, uno para los tres cables del potenciómetro y otro para los dos cables de alimentación. Estos conectores coinciden con las versiones macho del cable de extensión para actuadores lineales LD. Las versiones de actuador sin retroalimentación tienen dos cables de alimentación pelados y sin terminaciones, como se muestra en la imagen de la derecha a continuación. Los actuadores lineales sin retroalimentación no tienen cables que sean compatibles con el cable de extensión del actuador lineal.
La función de retroalimentación incluida con nuestros controladores de motor jrk los convierte en una excelente solución para controlar con precisión nuestros actuadores lineales con retroalimentación. Nuestro archivo de configuración para la utilidad de configuración jrk facilita la configuración, eliminando la necesidad de calibrar la retroalimentación y ajustar las constantes PID. Para comenzar, siga los pasos a continuación:
Las funciones de retroalimentación de nuestros controladores de motor Jrk G2 los convierten en una excelente solución para controlar con precisión nuestros actuadores lineales con retroalimentación. En particular, recomendamos el Jrk G2 21v3, que también está disponible con conectores soldados, o el más potente Jrk G2 24v13 para aplicaciones con cargas cercanas a los límites superiores de la clasificación del actuador. Nuestro archivo de configuración para la utilidad de configuración Jrk G2 facilita la configuración, eliminando la necesidad de ajustar las constantes PID. Para comenzar, siga los pasos a continuación:
Nota: Estos mismos archivos de configuración funcionarán también con el Jrk G2 24v13 si los abre con un editor de texto y cambia el campo «producto» cerca de la parte superior de «21v3» a «24v13».