$180.00 MXN (IVA Incluido)
5 disponibles
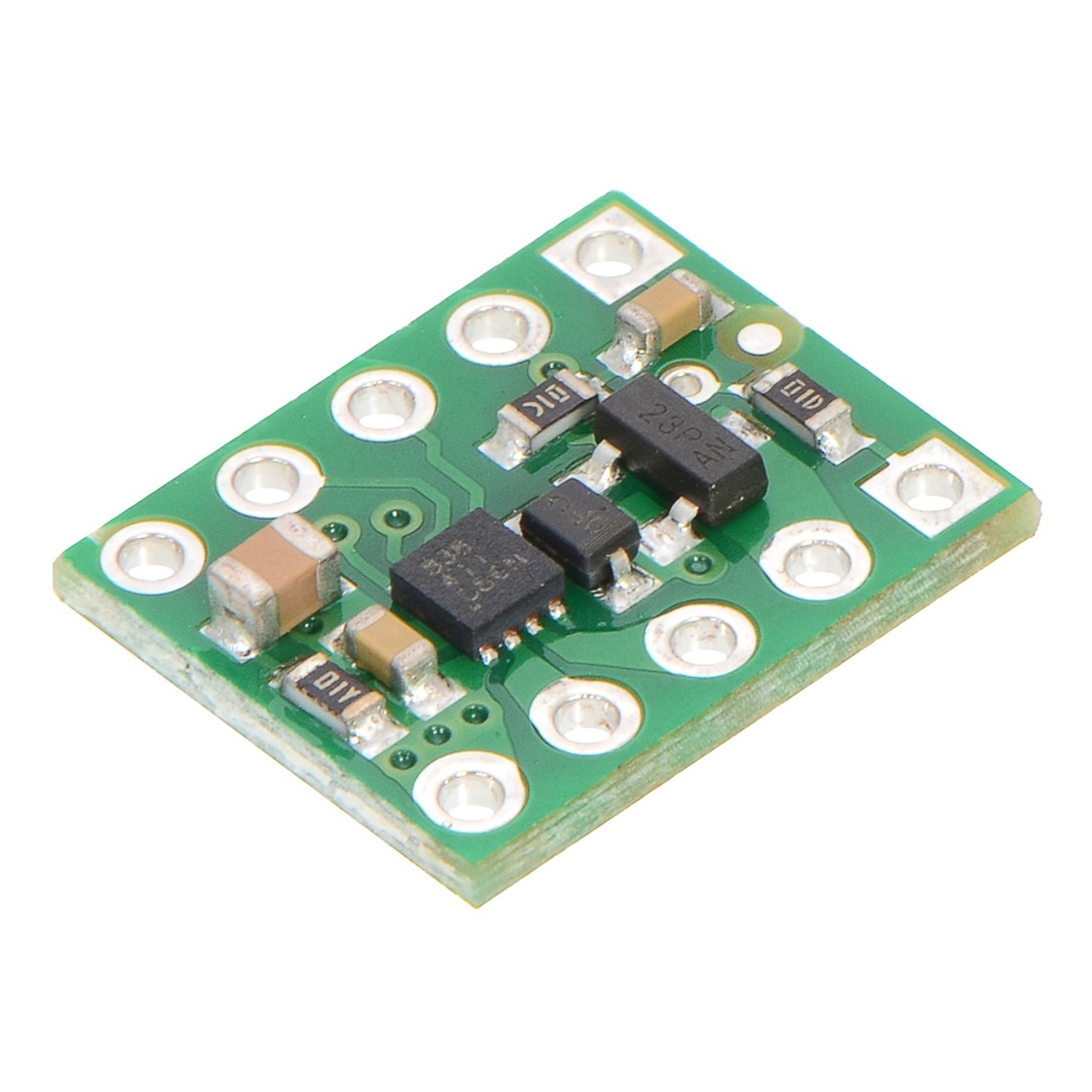
Esta pequeña placa DRV8838 es un controlador de motor simple puede entregar 1,7A por canal continua (pico de 1,8A) a un motor de corriente continua.. Con un rango de tensión de funcionamiento de 0V a 11V y una protección incorporada contra voltaje invertido, bajo voltaje, sobre-corriente, y el exceso de temperatura, este controlador es una gran solución para alimentar hasta dos pequeños motores, de baja tensión.
Localización: D4
| Fabricante | Pololu |
|---|---|
| Descuento | 5 o más $171.00 |
5 disponibles
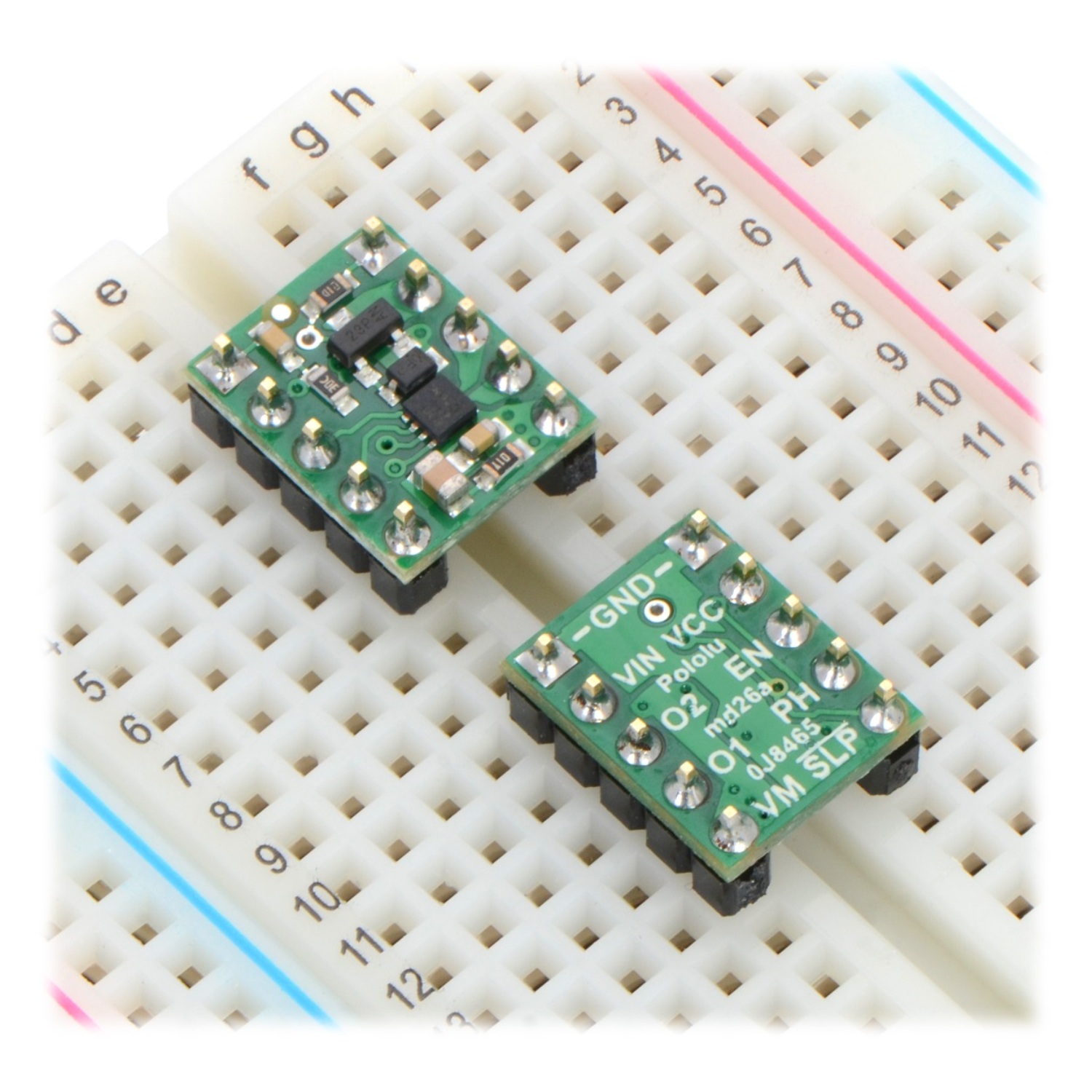
El DRV8838 de Texas Instruments es un pequeño controlador de motor de puente H que se puede usar para el control bidireccional de un motor de DC con escobillas de 0V a 11V. Puede suministrar hasta aproximadamente 1,7A de forma continua y puede tolerar corrientes pico de hasta 1,8A durante períodos cortos, lo que lo convierte en un controlador ideal para motores pequeños que funcionan con voltajes bajos. El DRV8838 es un gran CI, pero su paquete pequeño y sin cables dificulta su uso para el estudiante o aficionado típico; nuestra placa de expansión le da a este controlador el factor de forma de un paquete DIP de 10 pines, lo que lo hace fácil de usar con placas de pruebas estándar sin soldadura y placas perforadas de 0,1″. Dado que esta placa es un portador para el DRV8838, recomendamos leer atentamente la hoja de datos del DRV8838 (pdf de 1 MB). La placa incluye componentes SMD, incluido el DRV8838, y agrega un FET para protección de batería inversa.
Se incluyen dos conectores macho de 0,1″ de 1×5 pines con el soporte del controlador de motor DRV8838, que se pueden soldar para usar el controlador con placas de pruebas, placas perforadas o conectores hembra de 0,1″. (Los conectores pueden enviarse como una sola pieza de 1×10 que se puede partir por la mitad). También puede soldar los cables del motor y otras conexiones directamente a la placa.
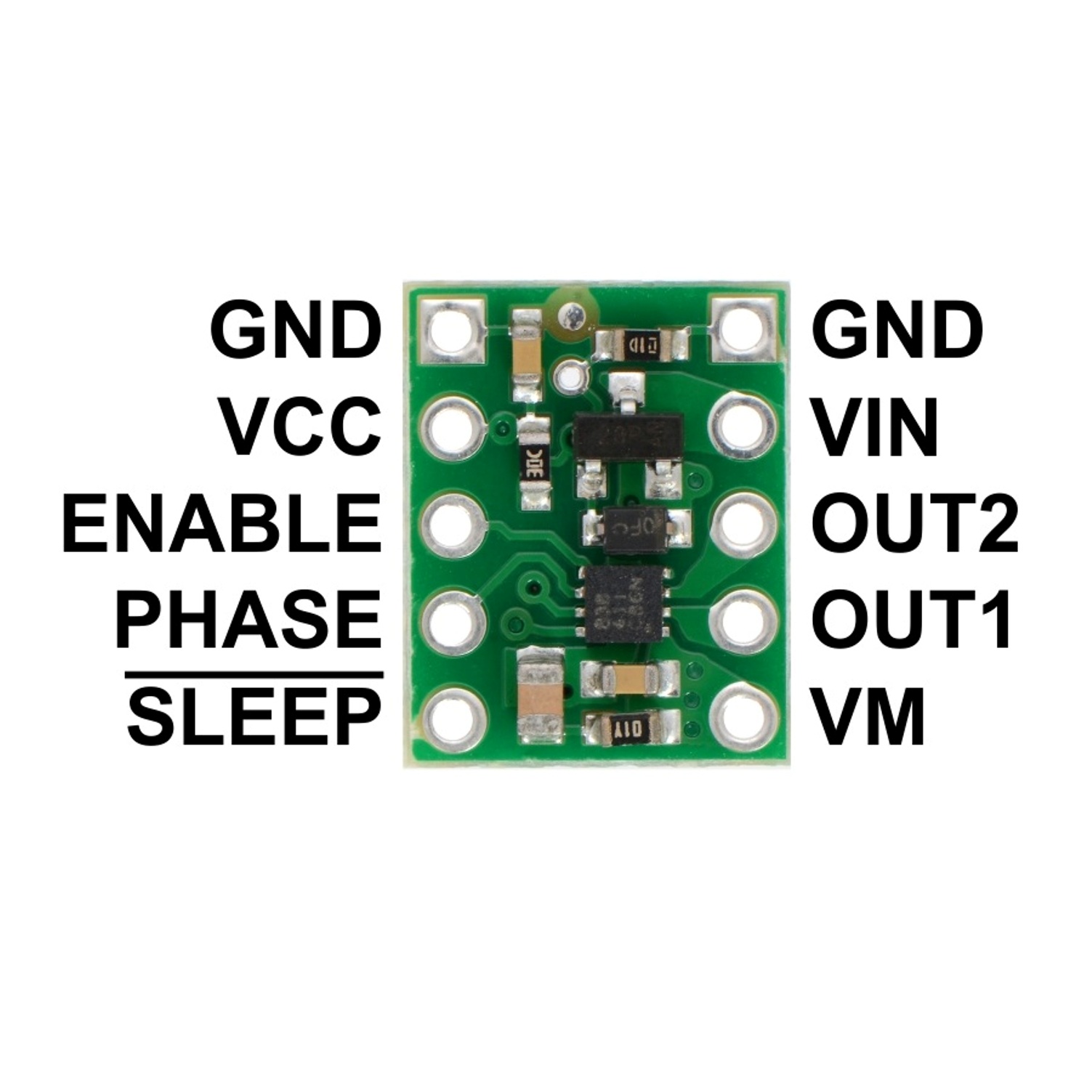
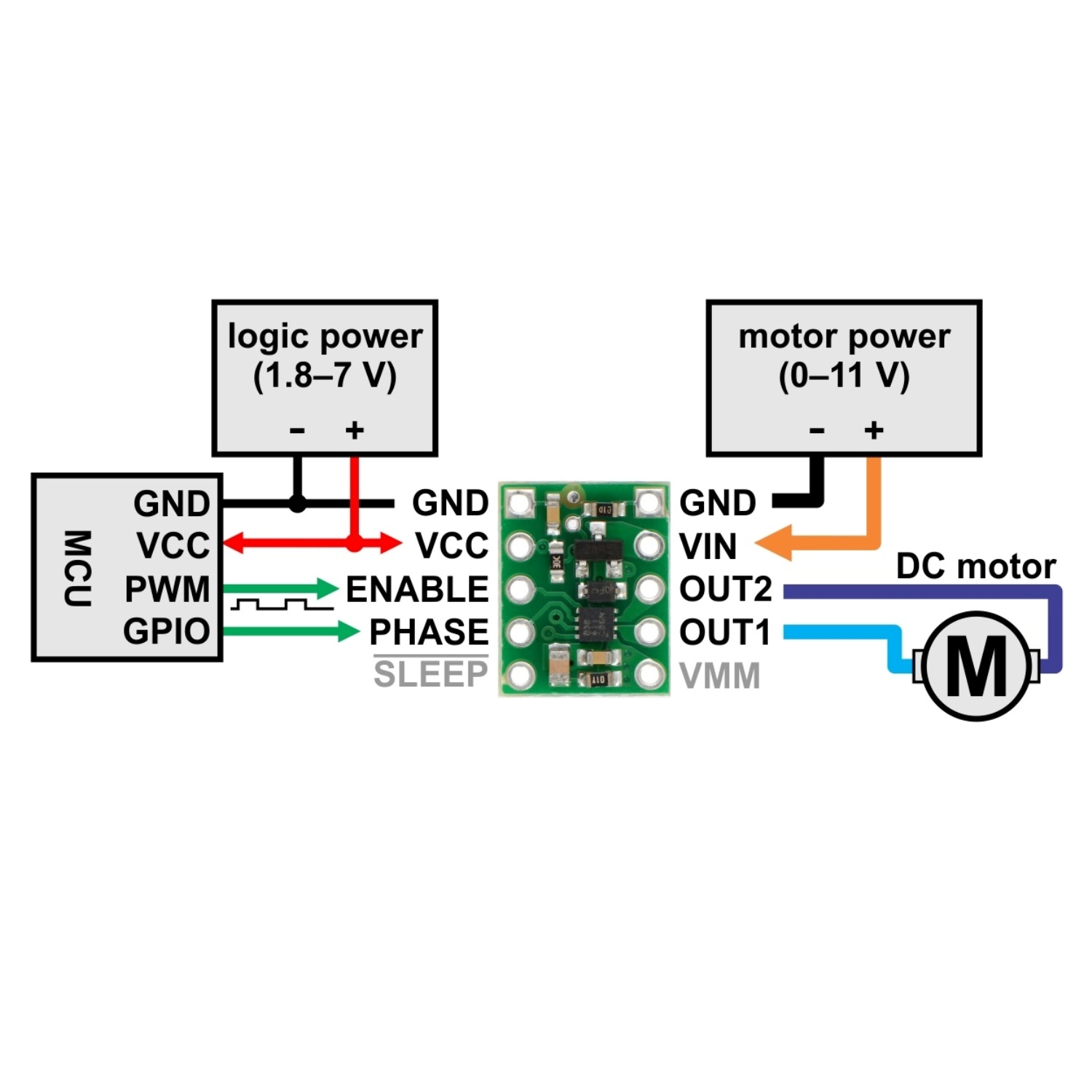
Las conexiones del motor y de la alimentación del motor se realizan en un lado de la placa y las conexiones de control y alimentación lógica se realizan en el otro. El controlador requiere que se suministre un voltaje de motor entre 0V y 11V al pin VIN o VM y un voltaje lógico entre 1,8V y 7V al pin VCC; el voltaje lógico normalmente puede ser suministrado por el dispositivo de control o compartido con este. El pin VIN es la entrada de alimentación del motor con protección inversa y es el punto recomendado para conectar la alimentación del motor. Sin embargo, el rendimiento del controlador comenzará a empeorar cuando el voltaje de entrada al circuito de protección inversa esté por debajo de unos pocos voltios, y 1,5V es el límite inferior en el que se puede usar el pin VIN. Para aplicaciones de voltaje muy bajo, la alimentación del motor debe conectarse directamente a VM, que omite el circuito de protección inversa.
El DRV8838 ofrece una interfaz de control PHASE/ENABLE simple de dos pines, donde el pin PHASE determina la dirección del motor y el pin ENABLE puede recibir una señal PWM para controlar la velocidad del motor. Las entradas de control PHASE y ENABLE se bajan a través de resistencias pull-down internas débiles (aproximadamente 100 kΩ). Cuando el pin ENABLE está bajo, las salidas del motor se cortocircuitan a tierra, lo que da como resultado un frenado dinámico de un motor conectado.
El pin SLEEP se puede llevar a un nivel bajo para poner al controlador en un modo de suspensión de bajo consumo y apagar las salidas del motor, lo que resulta útil si desea dejar que el motor funcione por inercia. El pin SLEEP se lleva a un nivel alto a través de una resistencia pull-up de 10 kΩ en la placa base para que el controlador esté activo de forma predeterminada; el consumo de corriente en reposo de la placa estará dominado por la corriente a través de esta resistencia cuando el pin se lleva a un nivel bajo para poner al controlador en suspensión. En la mayoría de las aplicaciones, este pin se puede dejar desconectado o puede servir principalmente como una forma de habilitar el funcionamiento por inercia. Para aplicaciones en las que es deseable un modo de suspensión de bajo consumo, se puede quitar la resistencia pull-up de 10 kΩ o se puede suministrar dinámicamente el voltaje lógico (VCC) para el controlador mediante una salida digital de su microcontrolador.
La siguiente tabla de verdad simplificada muestra cómo funciona el controlador:
| PHASE | ENABLE | SLEEP | OUT1 | OUT2 | Modo de operacio´n |
| 0 | PWM | 1 | PWM | L | Avance/freno a velocidad PWM % |
| 1 | PWM | 1 | L | PWM | Reversa/freno a velocidad PWM % |
| X | 0 | 1 | L | L | Freno bajo (salidas en cortocircuito a tierra) |
| X | X | 0 | Z | Z | inercia (salidas flotantes/desconectadas) |
Esta placa base también se puede utilizar con el IC controlador de motor DRV8837 de Texas Instruments, que es una alternativa compatible con pines del DRV8838. El DRV8837 tiene la misma funcionalidad y rendimiento que el DRV8838, pero ofrece una interfaz de control diferente. Las dos partes comparten la misma hoja de datos (pdf de 1 MB), lo que facilita la comparación directa de las dos. Si está buscando una placa base DRV8837, puede cambiar el DRV8838 en una de estas placas por un DRV8837 (si tiene las herramientas de retrabajo de montaje en superficie adecuadas), o es posible que podamos fabricar un lote personalizado de gran volumen para usted. Si está interesado en esta última opción, comuníquese con nosotros.
| PIN | Default State | Description |
| VIN | Esta placa base también se puede utilizar con el IC controlador de motor DRV8837 de Texas Instruments, que es una alternativa compatible con pines del DRV8838. El DRV8837 tiene la misma funcionalidad y rendimiento que el DRV8838, pero ofrece una interfaz de control diferente. Las dos partes comparten la misma hoja de datos (pdf de 1 MB), lo que facilita la comparación directa de las dos. | |
| VCC | Conexión de fuente de alimentación lógica de 1,8V a 7V. El consumo de corriente de la fuente de alimentación lógica suele ser de unos pocos miliamperios como máximo, por lo que en muchas aplicaciones este pin puede recibir alimentación dinámica opcional mediante una salida digital del microcontrolador. | |
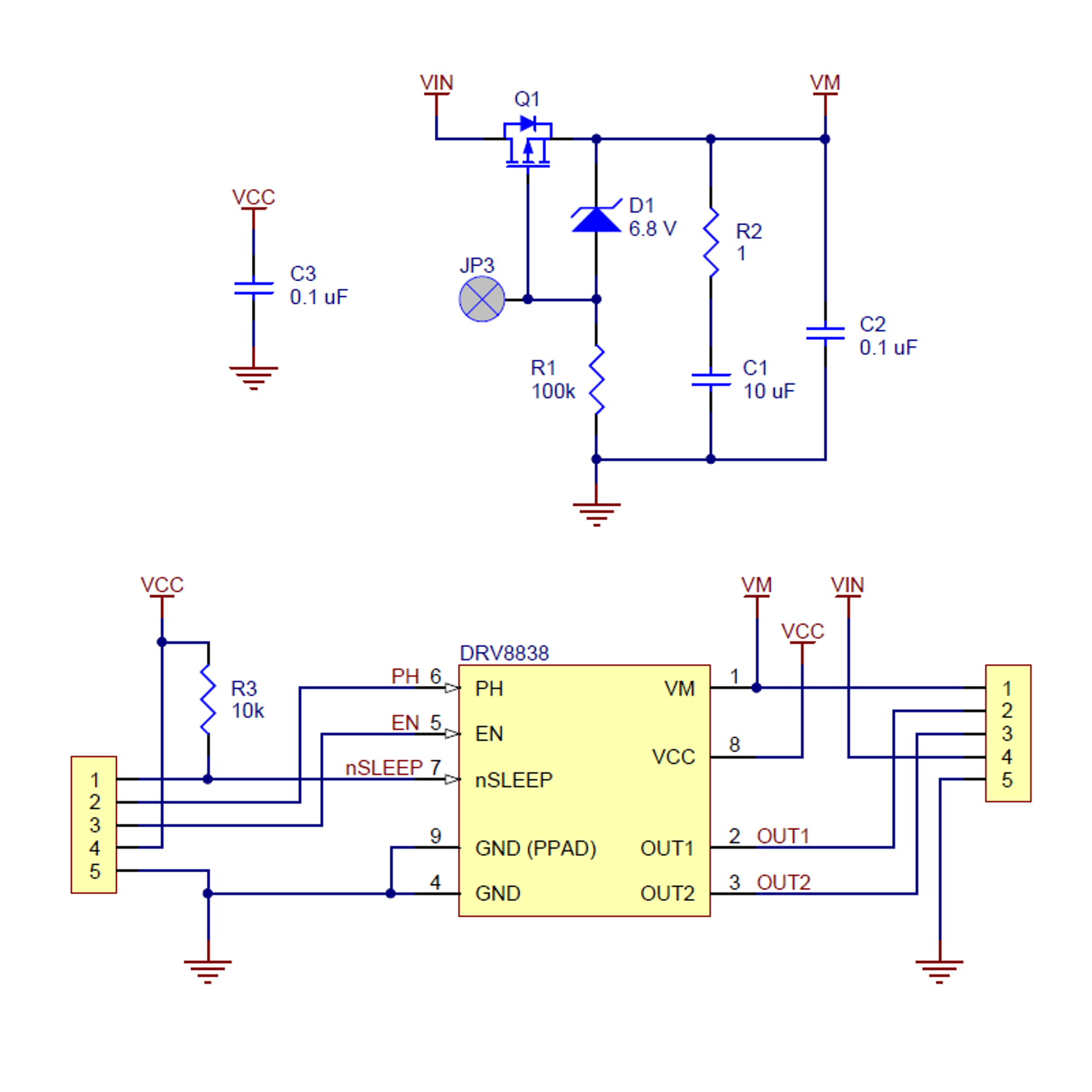
| VM | Este pin permite acceder a la fuente de alimentación del motor después del MOSFET de protección contra voltaje inverso (consulte el esquema de la placa a continuación). Se puede utilizar para suministrar energía protegida contra voltaje inverso a otros componentes del sistema. Generalmente está pensado como una salida, pero también se puede utilizar para suministrar energía a la placa (por ejemplo, en casos en los que el voltaje de suministro del motor es demasiado bajo para el circuito de protección contra voltaje inverso). | |
| GND | Puntos de conexión a tierra para las fuentes de alimentación lógica y del motor. La fuente de control y el controlador del motor deben compartir una conexión a tierra común. | |
| OUT1 | Salida del puente H 1. | |
| OUT2 | Salida del puente H 2. | |
| PHASE | LOW | Entrada de control de dirección |
| ENABLE | LOW | Entrada de control de velocidad; la lógica alta hace que el motor se active. |
| SLEEP | HIGH | Entrada de modo de suspensión/inercia; la lógica alta da como resultado un funcionamiento normal. |
La hoja de datos del DRV8838 recomienda una corriente continua máxima de 1,8A. Sin embargo, el chip por sí solo normalmente se sobrecalentará con corrientes más bajas. En nuestras pruebas, descubrimos que para la mayoría de las combinaciones de voltajes de lógica (VCC) y de suministro del motor (VIN), el chip pudo entregar 1,8 A durante entre 30 segundos y unos minutos antes de que la protección térmica del chip se activara y deshabilitara las salidas del motor; una corriente continua de 1,7 A fue sostenible durante muchos minutos sin provocar un apagado térmico.
Cuando tanto el voltaje del motor como el de la lógica son bajos (del orden de unos pocos voltios), el controlador comenzará a sobrecalentarse antes y se reducirá la corriente de salida máxima alcanzable. Por ejemplo, en nuestras pruebas con VIN y VCC a 2 V, la corriente de salida continua máxima del controlador cayó a alrededor de 1,4 A, y extraer 1,8 A del chip provocó que se sobrecalentara en unos pocos segundos.
La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del portador está diseñada para ayudar con esto extrayendo calor del chip del controlador del motor. Nuestras pruebas se llevaron a cabo al 100% del ciclo de trabajo sin flujo de aire forzado; la aplicación de PWM al motor introducirá un calentamiento adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para provocar quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
El esquema está disponible como archivo PDF descargable (PDF de 154 k).