
Este soporte para el controlador de motor DRV8874PWP de Texas Instrument puede suministrar corrientes continuas de hasta aproximadamente 2,1A y puede tolerar picos de corriente de hasta 6A. Dado que esta placa es un soporte para el DRV8874, recomendamos leer detenidamente la hoja de datos del DRV8874 . La placa se envía equipada con todos sus componentes SMD, incluido el DRV8874.
|
|
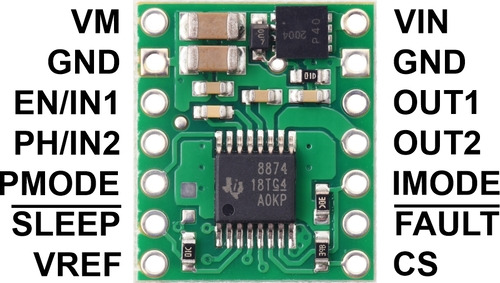
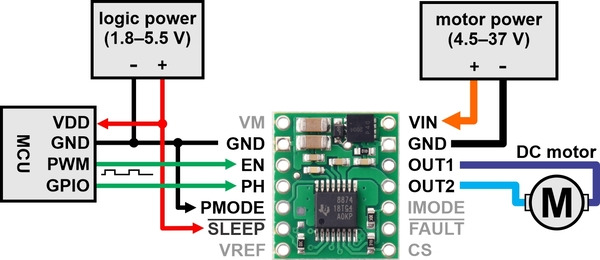
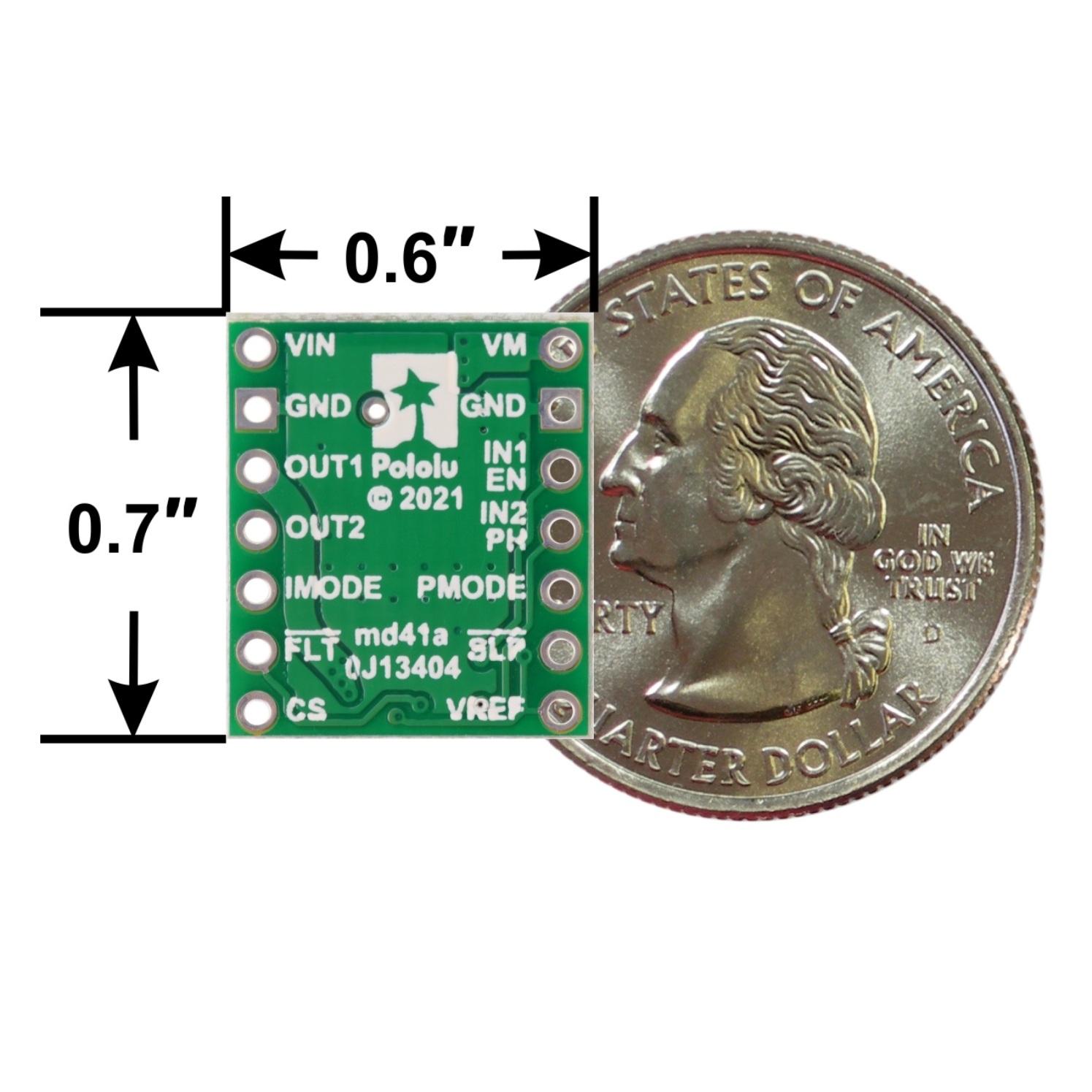
Las conexiones del motor y de potencia del motor se realizan en un lado de la placa y las conexiones de potencia lógica y control se realizan en el otro. El controlador requiere que se suministre un voltaje de motor entre 4,5V y 37V al pin VIN o VM. El controlador está en modo de suspensión de forma predeterminada y se debe suministrar un voltaje lógico entre 1,8V y 5,5V al pin SLEEP ; para sacarlo del modo de suspensión. Este voltaje lógico normalmente puede compartirse con el dispositivo de control, o puede ser suministrado por una salida del dispositivo de control, lo que permite el control dinámico del modo de suspensión. El pin VIN es la entrada de alimentación del motor con protección inversa y es el punto recomendado para conectar la alimentación del motor. VM es un punto de acceso para el suministro de energía del motor después del circuito de protección de voltaje inverso.
El DRV8874/DRV8876 presenta tres posibles modos de control: fase/habilitación (PH/EN), PWM (IN/IN) y medio puente independiente. El pin PMODE determina la interfaz de control y el estado se bloquea cuando el controlador está habilitado a través del pin SLEEP.
Establecer el pin PMODE bajo antes de habilitar el controlador, como se muestra en el diagrama anterior, establece el controlador en el modo de control de fase/habilitación, donde el pin PH determina la dirección del motor y el pin EN puede recibir una señal PWM para controlar el velocidad del motor (esto se conoce típicamente como operación de magnitud de signo). Este modo es generalmente más fácil de usar ya que solo requiere una señal PWM, pero solo permite la operación de conducción/freno. (La operación de conducción/freno generalmente proporciona una relación más lineal entre el ciclo de trabajo de PWM y la velocidad del motor que la operación de conducción/inercia, y generalmente recomendamos usar la operación de conducción/freno cuando sea posible).
| Operación simplificada de conducción/freno con PMODE=0 (PHASE/ENABLE) | ||||
| EN | PH | SALIDA (OUT) 1 | SALIDA (OUT) 2 | modo operativo |
| 0 | X | L | L | freno bajo (salidas en cortocircuito a tierra) |
| PWM | 1 | PWM (H/L) | L | avance/freno a velocidad PWM % |
| PWM | 0 | L | PWM (H/L) | marcha atrás/freno a velocidad PWM % |
Este modo también se puede utilizar para el funcionamiento en antifase bloqueado, donde se aplica un PWM de frecuencia suficientemente alta (hasta 100 kHz) al pin de fase (PH) y el pin de habilitación (EN) está vinculado alto. En la operación en antifase bloqueada, el ciclo de trabajo PWM controla la velocidad y la dirección, yendo desde la velocidad máxima en una dirección al 0 % del ciclo de trabajo hasta la velocidad máxima en la otra dirección al 100 % del ciclo de trabajo. Un ciclo de trabajo del 50% detendrá el motor. La frecuencia PWM apropiada generalmente dependerá de la inductancia del motor.
|
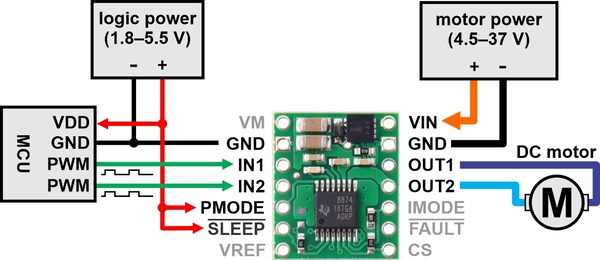
Cuando el pin PMODE se establece alto antes de habilitar el controlador, el controlador se establece en el modo de control PWM (IN/IN), lo que permite opciones de control más avanzadas, incluida la posibilidad de que el puente H ingrese a una alta impedancia (costa). estado sin tener que ponerlo en suspensión del controlador. La siguiente tabla de verdad muestra cómo lograr la operación de conducción/inercia (caída lenta) y conducción/frenado (caída rápida) utilizando la interfaz de control IN/IN:
| Modo de control PWM con PMODE=1 (IN/IN) | ||||
| EN 1 | EN 2 | SALIDA (OUT) 1 | SALIDA (OUT) 2 | modo operativo |
| 0 | 0 | Z | Z | costa (salidas desactivadas) |
| PWM | 0 | PWM (H/Z) | PWM (L/Z) | avance/marcha a velocidad PWM % |
| 0 | PWM | PWM (L/Z) | PWM (H/Z) | marcha atrás/navegación a velocidad PWM % |
| PWM | 1 | L | PWM (L/A) | marcha atrás/freno a velocidad 100% − PWM % |
| 1 | PWM | PWM (L/A) | L | avance/freno a velocidad 100% − PWM % |
| 1 | 1 | L | L | freno bajo (salidas en cortocircuito a tierra) |
Cuando el pin PMODE se deja en alta impedancia (es decir, flotando o desconectado) cuando el controlador está habilitado, el controlador se establece en el modo de control de medio puente independiente. Consulte la hoja de datos DRV8874/DRV8876 para obtener más información sobre este modo de control.
| PIN | Estado predeterminado | Descripción |
| VIN | Entrada de alimentación de placa de 4,5 V a 37 V. | |
| GND | Puntos de conexión a tierra para el motor y suministros lógicos. La fuente de control y el controlador del motor deben compartir una tierra común. | |
| VM | Este pin da acceso a la fuente de alimentación del motor después del MOSFET de protección de voltaje inverso (consulte el esquema de la placa a continuación). Se puede utilizar para suministrar energía con protección inversa a otros componentes del sistema. | |
| OUT1 | Salida motor 1. | |
| OUT2 | Salida motor 2. | |
| EN/IN1 | BAJO | Entrada de control de motor 1 (funciona como un pin de habilitación en el modo FASE/ENABLE). |
| PH/IN2 | BAJO | Entrada de control de motor 2 (funciona como un pin de dirección en el modo FASE/ENABLE). |
| PMODE | FLOTANTE | Pin de selección de interfaz de control. El estado de este pin se bloquea cuando el controlador se habilita a través del pin SLEEP . Establecer este pin bajo antes de habilitar establece el controlador en el modo de control de fase/habilitación (PH/EN). Establecer este pin alto antes de habilitar establece el controlador en el modo de control PWM (IN/IN). Dejar este pin flotando o desconectado en enable establece el controlador en el modo de control de medio puente independiente. |
| SLEEP | BAJO | Entrada de suspensión que pone al controlador en un modo de suspensión de bajo consumo cuando está bajo. Las salidas del controlador son de alta impedancia (costa) en modo de suspensión. |
| VREF | Tensión de referencia del umbral de limitación de corriente (ver más abajo). | |
| IMODE | TIRO BAJO | Entrada de cuatro estados para regulación de corriente y modo de protección contra sobrecorriente (ver más abajo). Este portador baja IMODE a GND a través de una resistencia de 20 kΩ que establece el modo de corte de corriente en ciclo por ciclo, la respuesta de sobrecorriente al reintento automático y la respuesta de FALLA al corte de corriente y sobrecorriente. |
| FAULT | FLOTANTE | Salida de falla activa baja de drenaje abierto. Este pin baja durante una condición de sobrecorriente, sobretemperatura o bajo voltaje. Se requiere una resistencia pull-up externa para usar este pin. |
| CS | Salida de detección de corriente. Este pin proporciona un voltaje de retroalimentación de detección de corriente analógica de aproximadamente 1,1V/A (DRV8874) o 2,5V/A (DRV8876). |
El DRV8874/DRV8876 se puede configurar para limitar activamente la corriente a través de los motores mediante el uso de una regulación de corriente PWM de tiempo de inactividad fijo (corte de corriente) o un esquema de corte de corriente PWM ciclo por ciclo. El esquema de corte actual y la respuesta de sobrecorriente se pueden seleccionar a través de la entrada de nivel cuádruple IMODE. Este portador baja IMODE a GND a través de una resistencia de 20 kΩ, configurando el modo de corte actual en ciclo por ciclo. El límite de corriente está determinado por el voltaje en el pin VREF, que esta placa portadora lleva a SLEEP a través de una resistencia de 10 kΩ, y la resistencia en el pin CS, que esta placa portadora baja a GND a través de una resistencia de 2,49 kΩ. Cuando SLEEP está conectado a 5 V, el límite de corriente se establece en aproximadamente 4,4 A en el módulo DRV8874 o 2 A en el módulo DRV8876. El límite de corriente se puede reducir conectando una resistencia adicional entre VREF y GND o conectando un voltaje de referencia externo directamente a VREF; el límite de corriente se puede aumentar conectando una resistencia adicional entre CS y GND. La limitación de corriente se puede desactivar conectando CS directamente a GND. Consulte la hoja de datos DRV8874/DRV8876 para obtener más información sobre la regulación actual del controlador.
El DRV8874 está clasificado para una corriente máxima de 6 A y el DRV8876 está clasificado para una corriente máxima de 3,5 A según sus respectivas hojas de datos. Sin embargo, los chips por sí mismos se sobrecalentarán con corrientes más bajas. En nuestras pruebas, descubrimos que los chips en nuestras placas portadoras podían entregar sus corrientes máximas nominales durante menos de un segundo antes de que sus protecciones térmicas se activaran y deshabilitaran las salidas del motor. Pudieron operar con sus límites de corriente predeterminados de 4,4 A (DRV8874) y 2 A (DRV8876) durante unos segundos antes del apagado térmico. Las especificaciones de corriente continua que proporcionamos para estos productos de 2,1 A ( portadora DRV8874 ), 1,3 A ( portadora DRV8876 ) y 1,1 A ( portadora DRV8876 (QFN)) son corrientes que encontramos que son sostenibles durante muchos minutos sin activar el apagado térmico. Estas pruebas se realizaron a temperatura ambiente en un espacio abierto sin refrigeración adicional (p. ej., sin flujo de aire forzado ni disipadores de calor).
La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del portador está diseñada para ayudar con esto extrayendo calor del chip del controlador del motor. PWMing el motor introducirá calentamiento adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para provocar quemaduras incluso antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
|
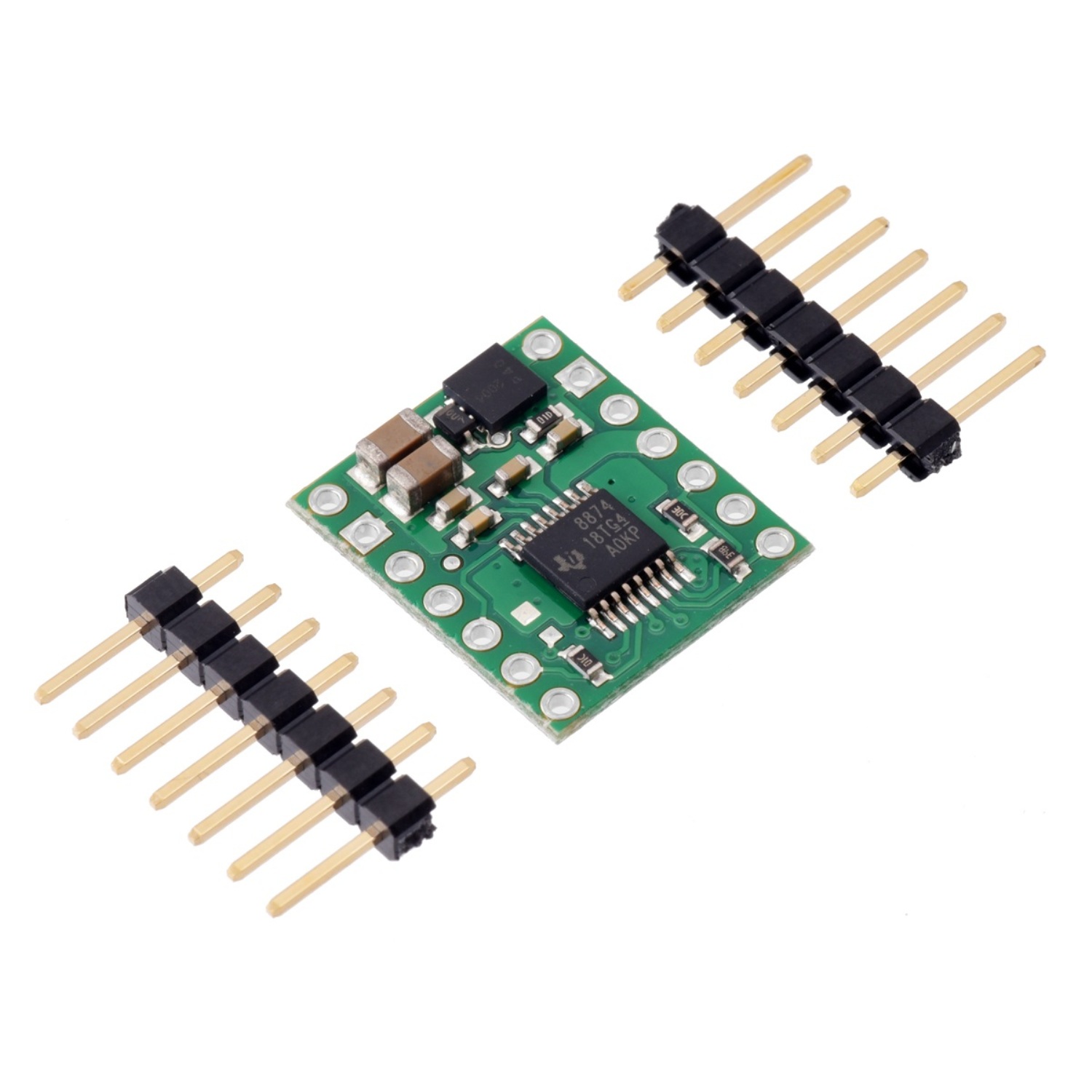
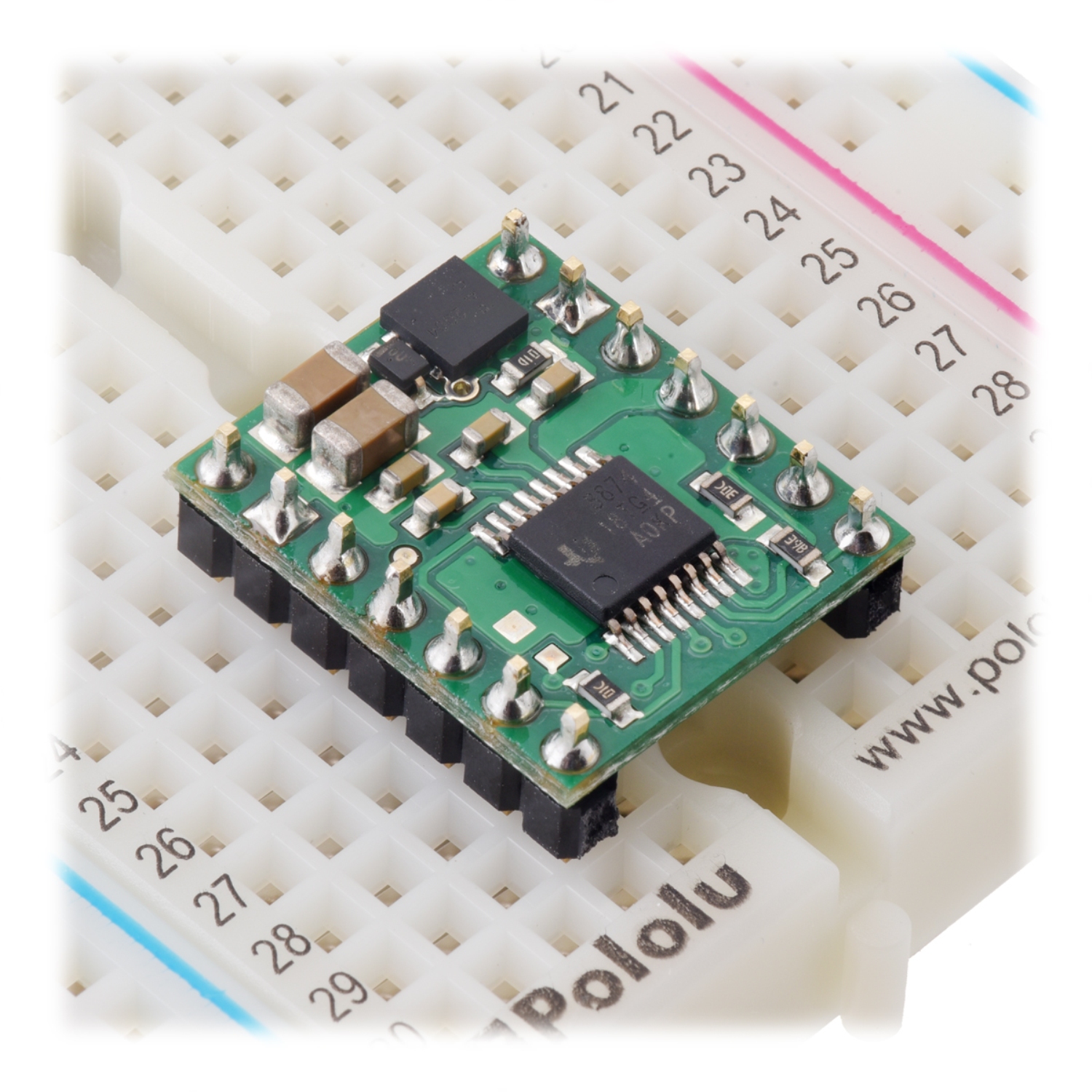
Los cabezales macho separables de 0,1″ se incluyen con el controlador de motor (tanto el DRV8874 como el DRV8876), que se pueden soldar para usar el controlador con placas perforadas, placas de pruebas o conectores hembra de 0,1″ de separación. (Los cabezales pueden enviarse como una sola tira más grande que se puede dividir en pedazos más pequeños). También puede soldar los cables del motor y otras conexiones directamente a la placa.
|
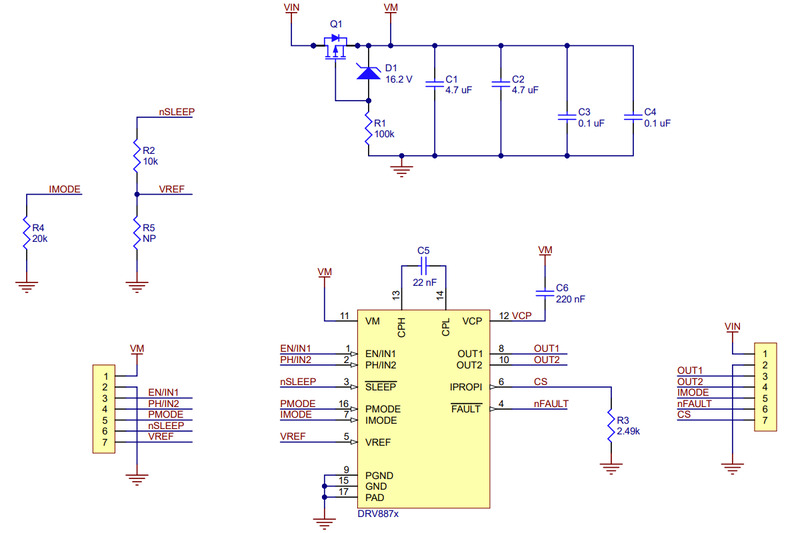
Este diagrama también está disponible como pdf descargable: DRV887x Single Brushed DC Motor Driver Carrier esquema (110k pdf).