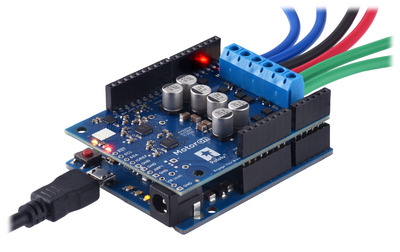


La familia Motoron M2S de shields de controlador de motor dual de alta potencia facilita el control independiente de dos motores de DC cepillados bidireccionales con un Arduino, sin importar que la tarjeta sea original o genérico/compatible . A diferencia de la mayoría de los controladores de motor y shields controladores de motor, el Motoron no requiere salidas PWM ni temporizadores en su Arduino. En cambio, Arduino se comunica con Motoron usando I²C, por lo que solo se necesitan dos líneas de I/O.
 |
|
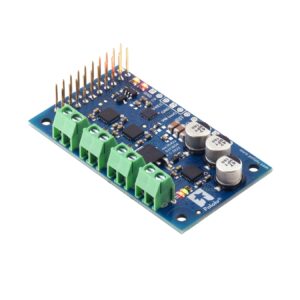
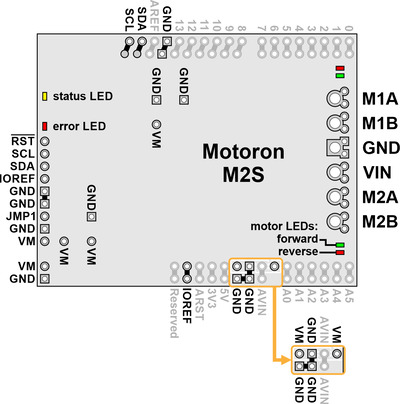
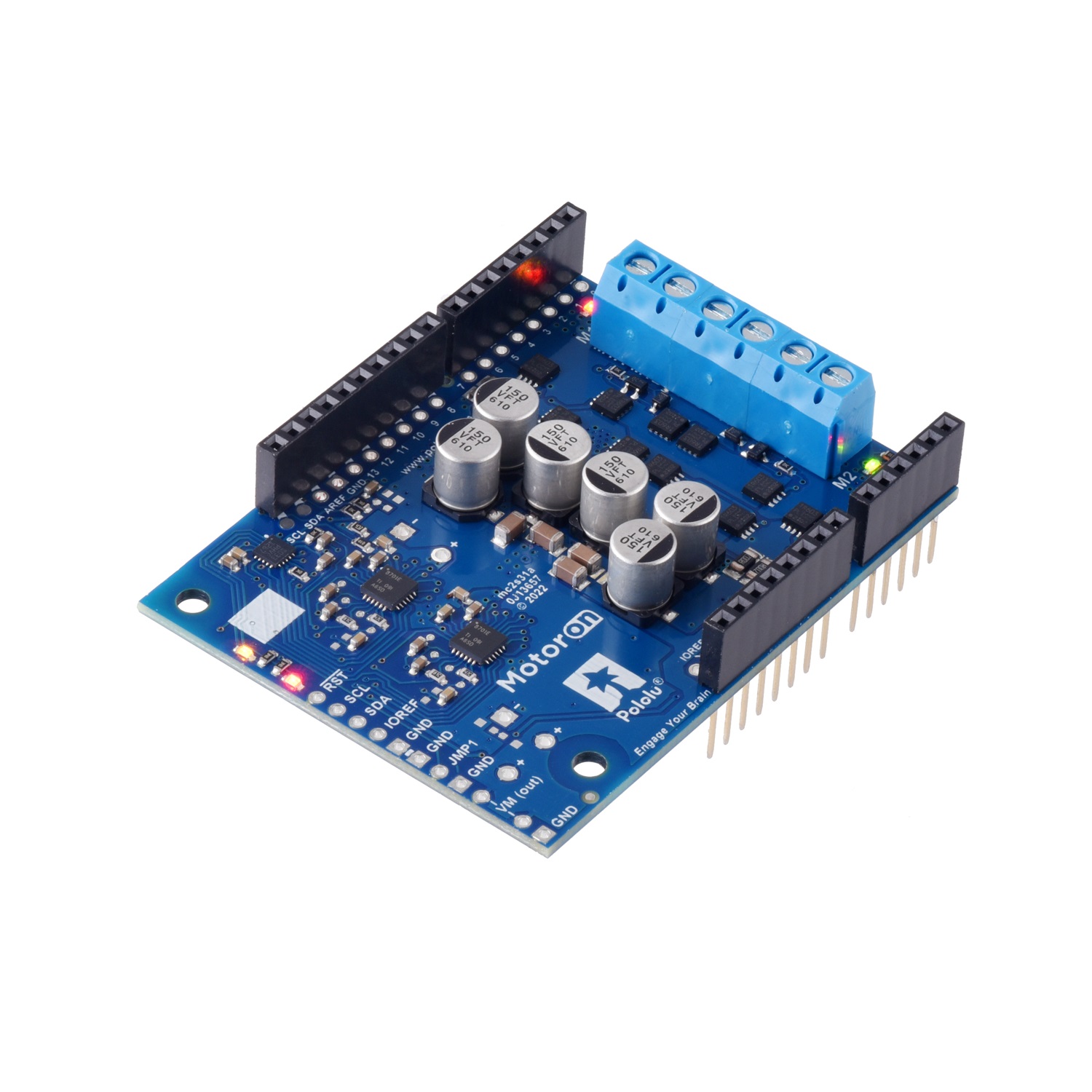
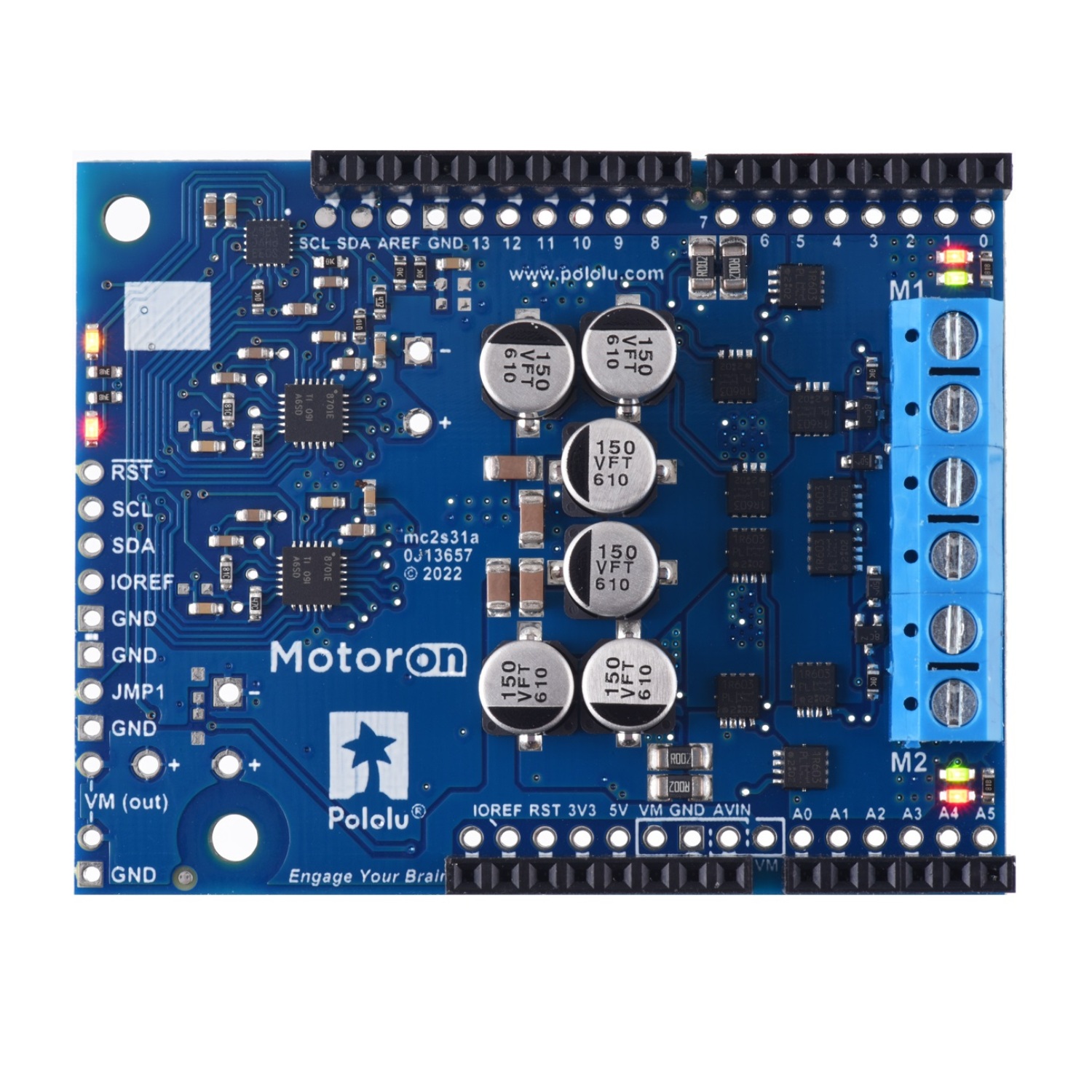
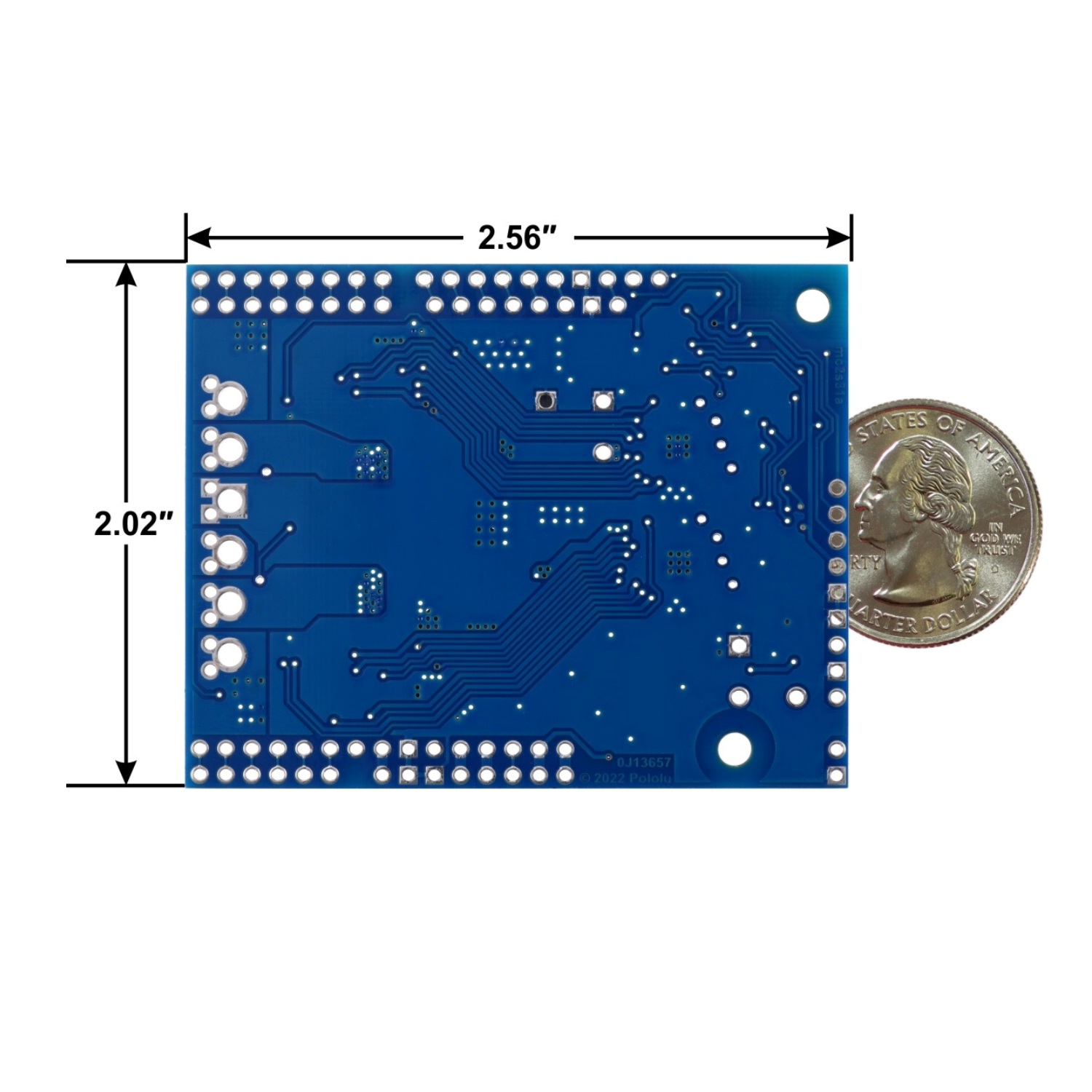
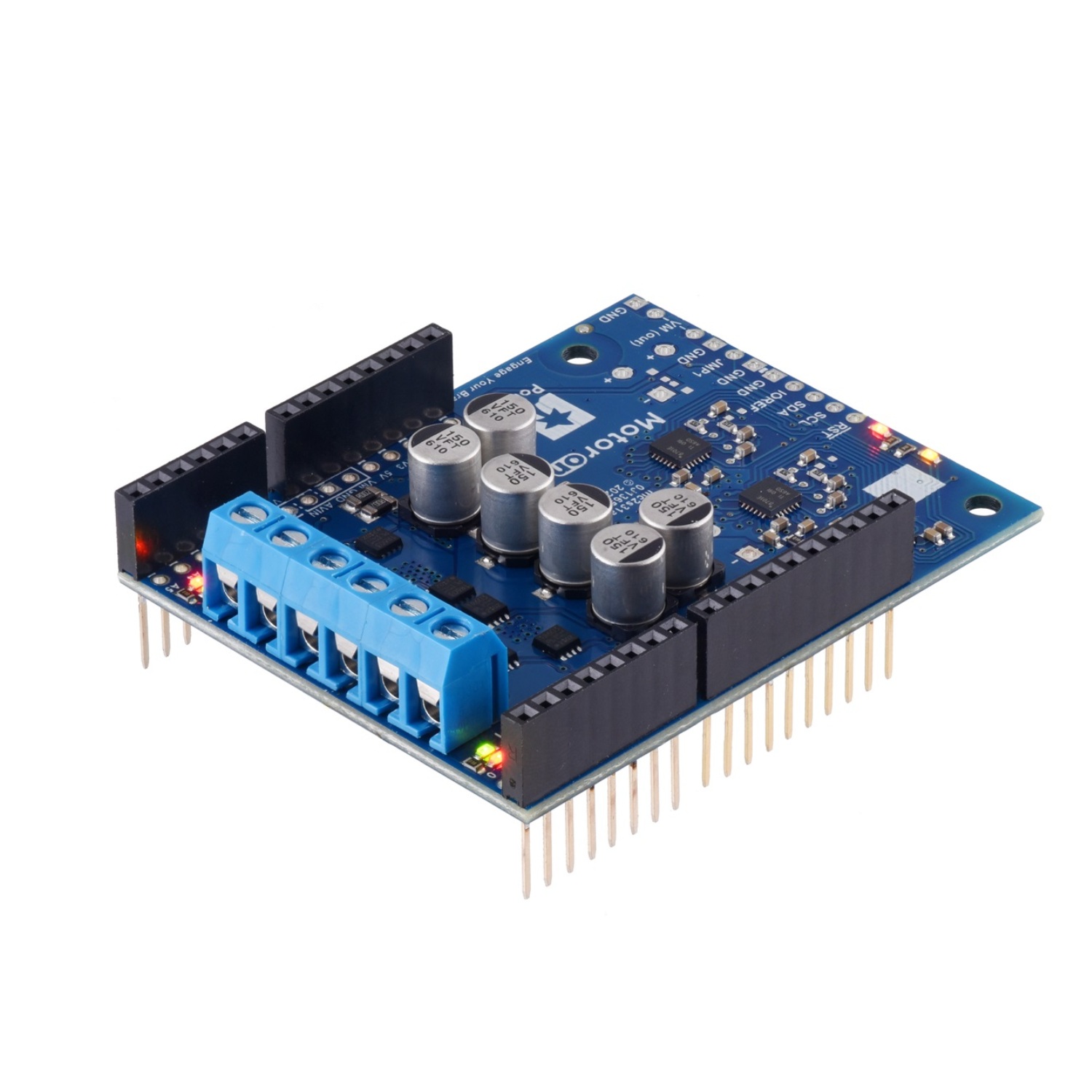
El shield M2S18v18 funciona de 6,5V a 30V (máximo absoluto, no está diseñado para usarse con baterías de 24V) y puede proporcionar corrientes de salida continuas de hasta 18A por motor. El M2S18v18 se puede distinguir de otros tipos de shield M2S por sus MOSFET discretos más pequeños y el número 150 en la parte superior de los condensadores electrolíticos plateados altos.
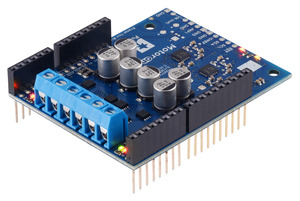
1) Los bloques de terminales azules de 5 mm están clasificados para hasta 16 A, por lo que para aplicaciones de corriente más alta recomendamos obtener una versión sin soldar y luego soldar cables gruesos directamente a la placa.
2) Los bloques de terminales incluidos son más altos que los cabezales, por lo que un escudo Motoron M2S ensamblado con bloques de terminales de 5 mm está diseñado para usarse como una placa independiente o en la parte superior de una pila de escudos. (Intentar apilar varios blindajes con bloques de terminales puede provocar cortocircuitos entre los bloques de terminales apilados).
|
Los MOSFET pueden manejar grandes picos de corriente durante períodos breves (por ejemplo, 100A durante unos pocos milisegundos), y el corte de corriente del controlador mantendrá la corriente promedio por debajo del límite establecido. Las clasificaciones máximas son para transitorios rápidos (por ejemplo, cuando un motor se enciende por primera vez), y la clasificación continua depende de varias condiciones, como la temperatura ambiente. PWMing el motor introducirá calentamiento adicional proporcional a la frecuencia. La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del controlador está diseñada para extraer calor de los MOSFET, pero el rendimiento se puede mejorar agregando un disipador de calor o flujo de aire. Para instalaciones de alta corriente, los cables del motor y de la fuente de alimentación también deben soldarse directamente en lugar de pasar por los bloques de terminales azules de 5 mm.
Advertencia: Este controlador de motor no tiene apagado por sobretemperatura. Una condición de sobrecalentamiento o sobrecorriente puede causar daños permanentes al controlador del motor. Puede considerar usar el sensor de corriente del escudo o un sensor de corriente externo para monitorear su consumo de corriente.