Controlador Dual para Motor Pololu TReX (Últimas piezas)
¡Oferta!
$2,820.00El precio original era: $2,820.00.$999.00El precio actual es: $999.00. MXN (IVA Incluido)
2 disponibles
Código De Producto: 777
El TReX combina RC, entradas analógicas y en serie en una solución de control de motores de gran alcance capaz de entregar continuamente 13A por motor. El TReX va a funcionar nada más sacarlo de la caja como un control electrónico de velocidad (ESC), pero su capacidad de transición sin problemas entre RC/analógico en serie hace que sea capaz de mucho más.
NOTA: Este producto ha sido descontinuado. Le recomendamos buscar entre nuestros controladores el que mejor se adapte a sus necesidades
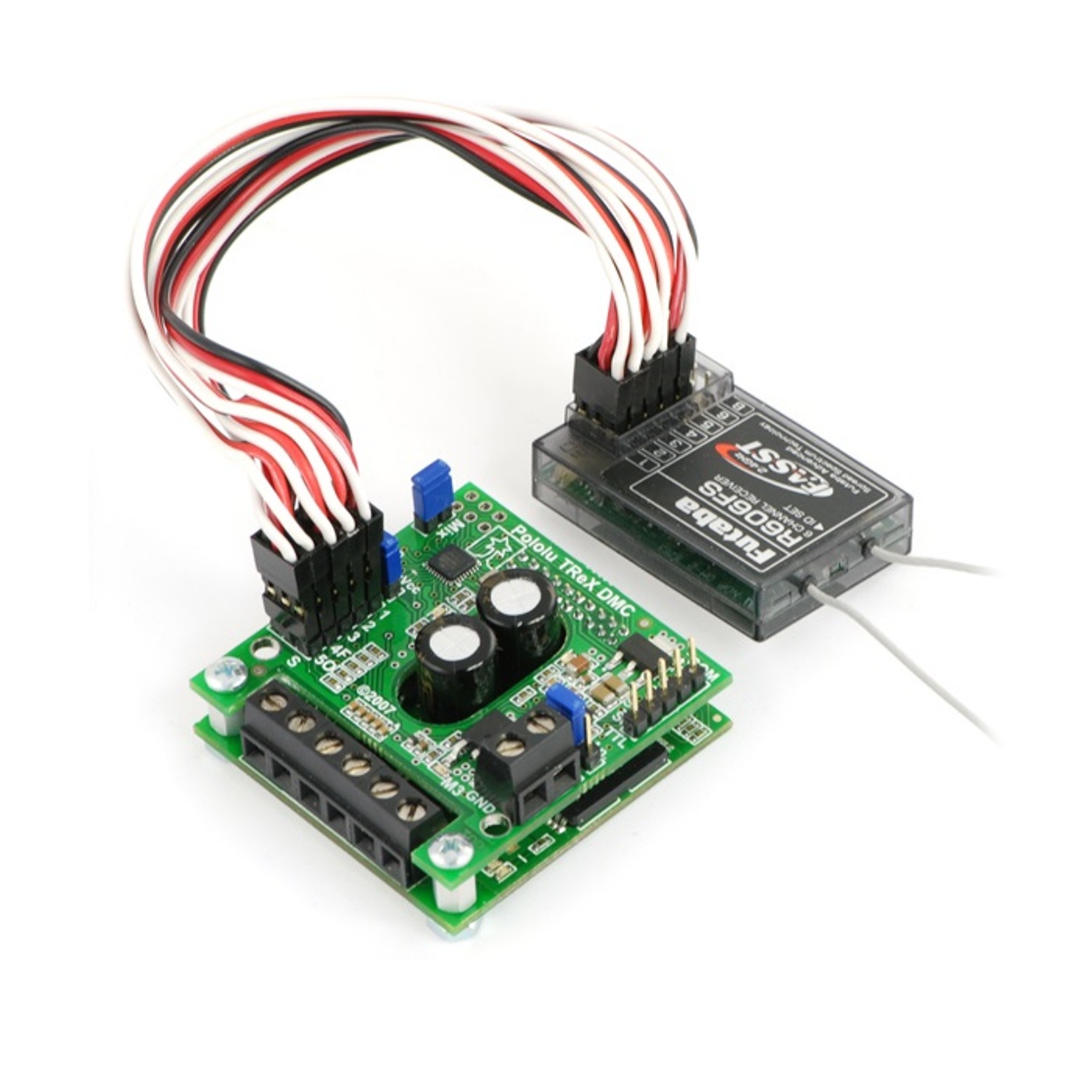
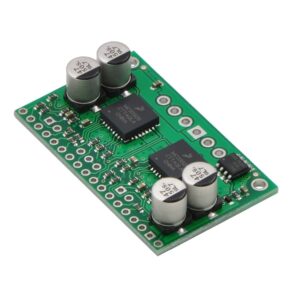
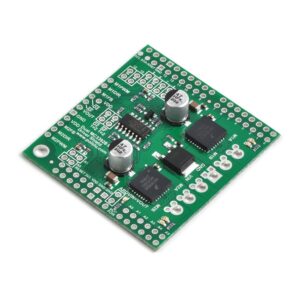
El controlador de motor dual TReX es un controlador de motor de CC versátil y de alta potencia diseñado para combinar a la perfección el control autónomo y humano de robots pequeños y medianos. El TReX puede controlar dos motores bidireccionales y uno unidireccional a través de tres interfaces de control independientes: servopulsos de control de radio (RC), voltaje analógico y serie asíncrona (RS-232 o TTL). Mantiene su compacidad a través de un diseño de dos placas que presenta el portador de controlador de motor dual de alta corriente basado en VNH2SP30 como capa inferior.
El TReX utiliza cinco canales de entrada para recibir señales de control analógicas o RC. Cuando se opera en modo RC o analógico, los cinco canales funcionan de la siguiente manera:
Canal 1: velocidad y dirección del motor 1 o, si está en modo mixto, girar a izquierda/derecha
Canal 2: velocidad y dirección del motor 2 o, si está en modo mixto, avance/retroceso
Canal 3: velocidad del motor auxiliar (unidireccional)
Canal 4: se puede utilizar para habilitar el «modo invertido», que permite controlar los robots reversibles normalmente cuando están invertidos.
Canal 5: determina si los motores son controlados por las entradas del canal o por la interfaz serie; este canal le permite cambiar entre control autónomo y humano a voluntad
La interfaz serie puede cambiar instantáneamente con una de las otras dos interfaces, lo que permite un control remoto y autónomo combinado. Por ejemplo, un robot podría configurarse para funcionar de forma autónoma la mayor parte del tiempo, pero un operador humano podría anular la función autónoma si el robot se atasca o se encuentra en una situación peligrosa. Si se selecciona el modo serie como interfaz principal, las mediciones de alta resolución de las señales de entrada de los cinco canales (ya sean pulsos RC o voltajes analógicos) se ponen a disposición del controlador del robot autónomo, lo que permite una combinación compleja e ilimitada de control del operador y sensor. aporte. Por ejemplo, el TReX sería un excelente controlador de motor para un robot equilibrador controlado remotamente.
Especificaciones técnicas
Dimensiones: 1,9″ x 1,9″ x 0,8″
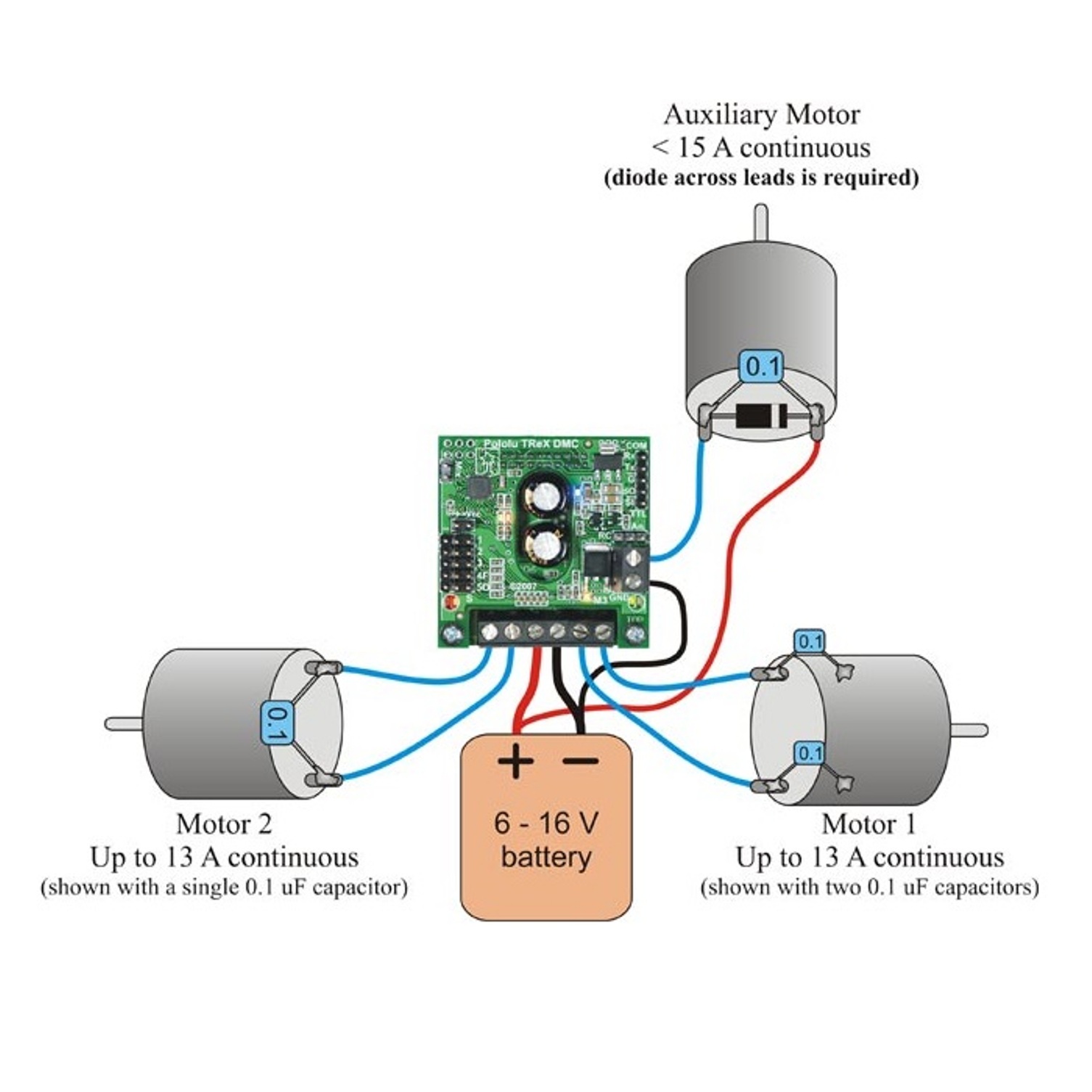
Tensión de alimentación: 6 – 16 V
Salidas de motor primario: 2 bidireccionales, 30 A pico, hasta 13 A continuos por canal (se pueden combinar para controlar 1 bidireccional, 25 A continuos)
Salida auxiliar: 1 unidireccional, 15 A continuo
Control de velocidad: 128 pasos en cada dirección.
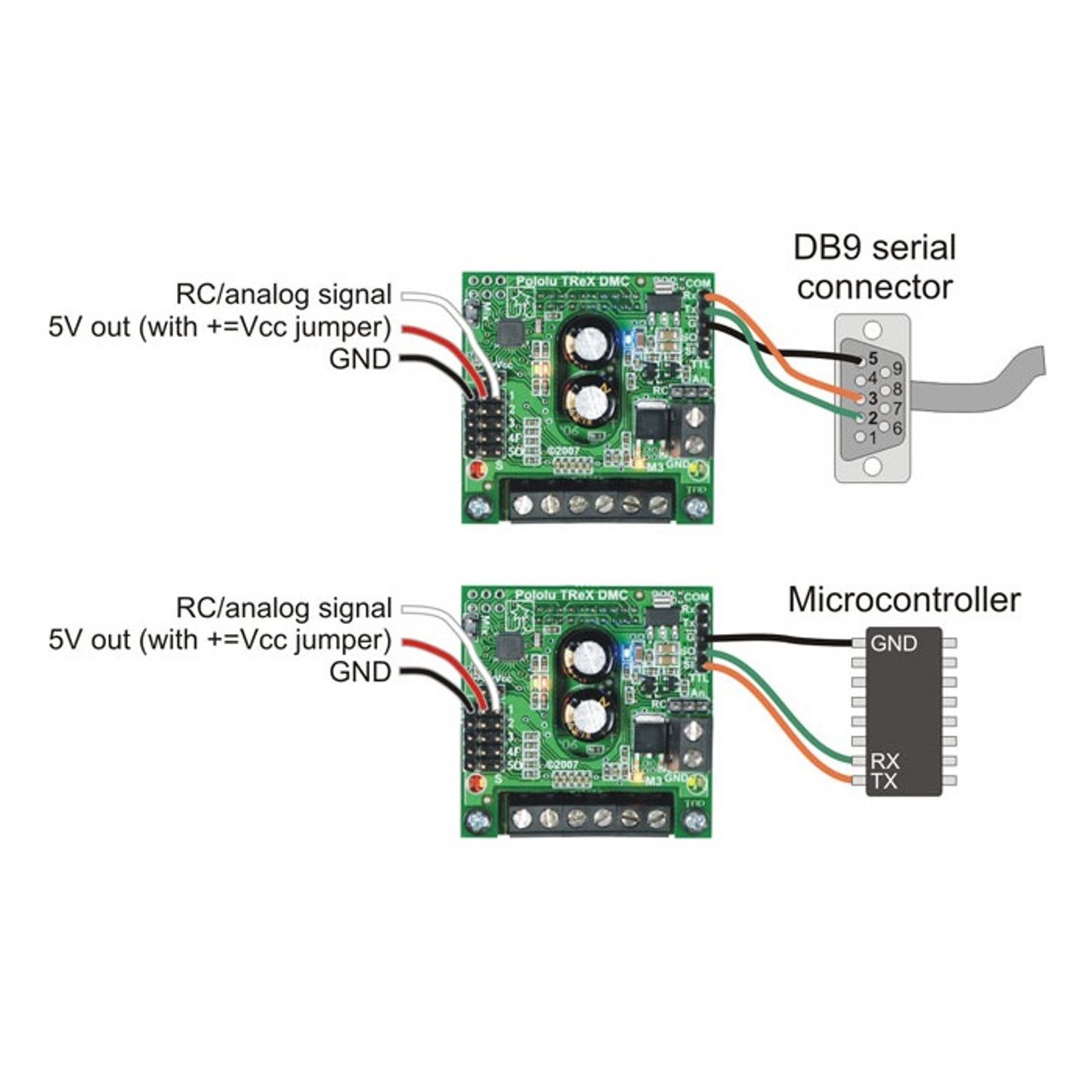
Interfaces de control: servopulsos RC, voltajes analógicos o comandos en serie; interfaz maestra configurada por puente de selección de modo
Canales de entrada: 5 (pulsos de servo RC o voltajes analógicos)
Mediciones de pulso: RC Resolución de 12 bits, precisión de 1 us
Medidas analógicas: Resolución de 10 bits
Interfaz serie: tanto RS-232 como TTL (nivel lógico), bidireccional
Velocidad en baudios: admiten 11 velocidades en baudios comunes que van desde 1200 a 115 200 bps
Protocolo ampliado: Permite múltiples servocontroladores y controladores de motor Pololu en una línea serie
Protocolo compacto: Permite configurar simultáneamente los motores 1 y 2 con sólo tres bytes
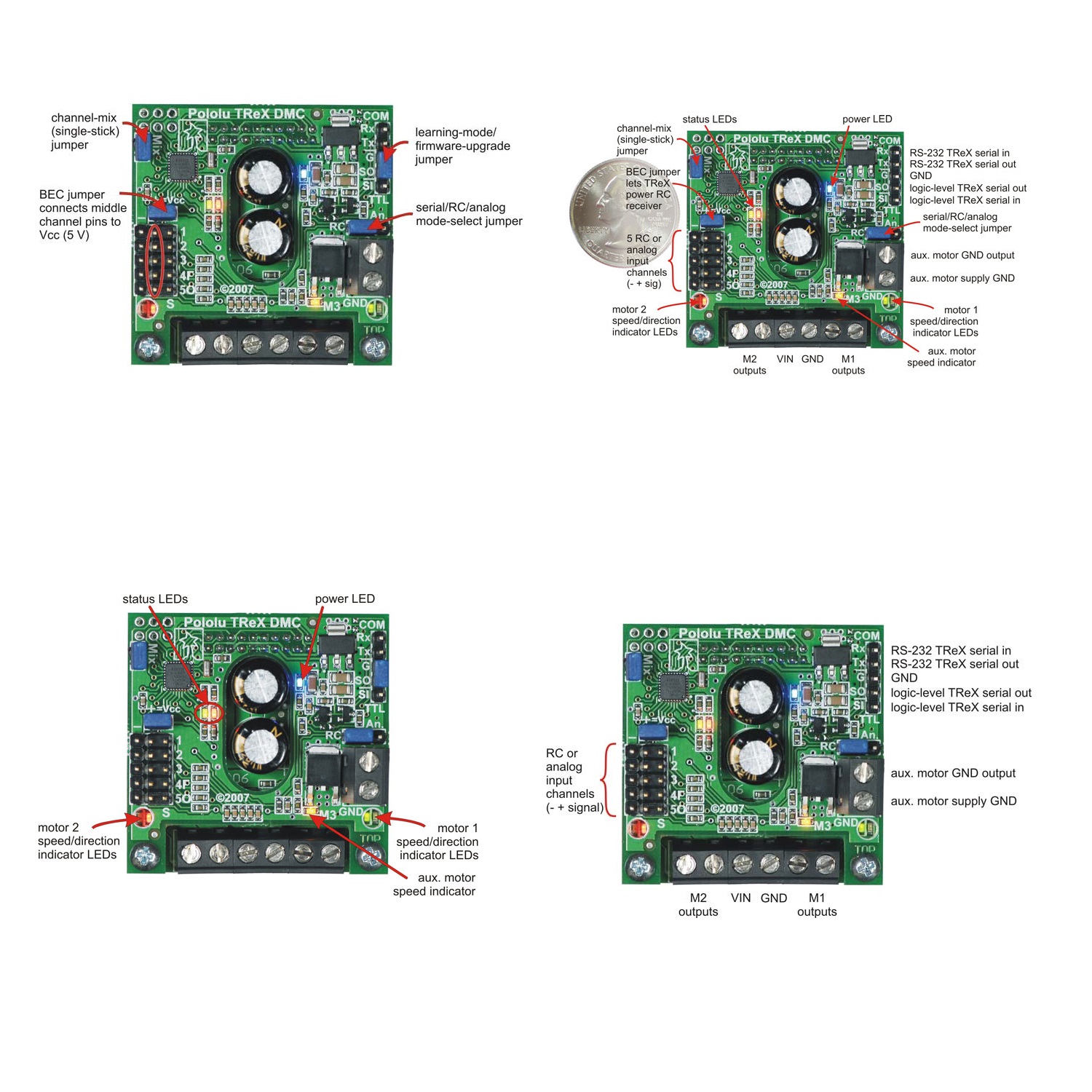
Funciones de control RC/analógico
El puente del circuito de eliminación de batería (BEC) permite que el TReX alimente opcionalmente su receptor RC o controlador analógico
El puente de modo mixto permite el control del motor con un solo dispositivo de robots de accionamiento diferencial
Calibración automática para su controlador RC o analógico en particular (el TReX puede aprender los rangos de canales)
Opciones accesibles a través de la interfaz serie
Los cinco valores de entrada de canal de alta resolución están disponibles
Los valores de entrada de canal reasignados muestran lo que haría el TReX si tuviera el control.
Comprobación de redundancia cíclica de 7 bits opcional para garantizar la validez de los comandos/datos.
Los valores de calibración se pueden leer y configurar explícitamente.
Cada canal se puede invertir y escalar parabólicamente
Ajustes de límite de corriente, aceleración y velocidad máxima del motor
Los motores bidireccionales se pueden configurar (individualmente) en modo de inercia o freno variable cuando se encuentran en la banda muerta.
Firmware actualizable
Características de seguridad
Los requisitos de “arranque seguro” evitan la activación accidental del motor durante el encendido
Apagado automático opcional del motor en caso de error en serie, tiempo de espera o ruido del canal de entrada.
Nota: El TReX no requiere el uso de la interfaz serial para funcionar; Funcionará desde el primer momento como control electrónico de velocidad (ESC). Sin embargo, no tendrá acceso al conjunto completo de funciones que proporciona TReX si no utiliza la interfaz serie.