La serie XL330 de DYNAMIXEL maneja una variedad de servomotores compactos y livianos, lo cual es una solución muy útil cuando se construye una aplicación pequeña o se opera DYNAMIXEL en un espacio pequeño.
A diferencia de los modelos de nivel de entrada anteriores, el XL330-M288-T maneja un rango de voltaje de 3.7V ~ 6V y el XL330 viene con varios modos de operación, incluido el control de posición basado en corriente y el control de corriente.
La serie XL330 de DYNAMIXEL maneja una variedad de servomotores compactos y livianos, lo cual es una solución muy útil cuando se construye una aplicación pequeña o se opera DYNAMIXEL en un espacio pequeño.
A diferencia de los modelos de nivel de entrada anteriores, el XL330-M288-T maneja un rango de voltaje de 3.7V ~ 6V y el XL330 viene con varios modos de operación, incluido el control de posición basado en corriente y el control de corriente.
Características:
Varios modos de funcionamiento
Control de velocidad, control de posición, control de posición extendido, control PWM, control de corriente, control de posición basado en corriente
Control de perfil para una planificación de movimientos fluidos
Voltaje de entrada: 3.7V ~ 6V (recomendado 5V)
Modelo DYNAMIXEL de tamaño pequeño – Dimensión: 20 X 34 X 25 (WⅹHⅹD) [mm] y peso: 18 g
admite el protocolo RC sin dispositivo de conversión adicional
Ahorro de energía con corriente reducida
Contenido del paquete:
Descripción
Cantidad
DYNAMIXEL
XL330-M288-T
1
CABLE
Robot Cable-X3P 180mm
1
TORNILLOS/TUERCAS
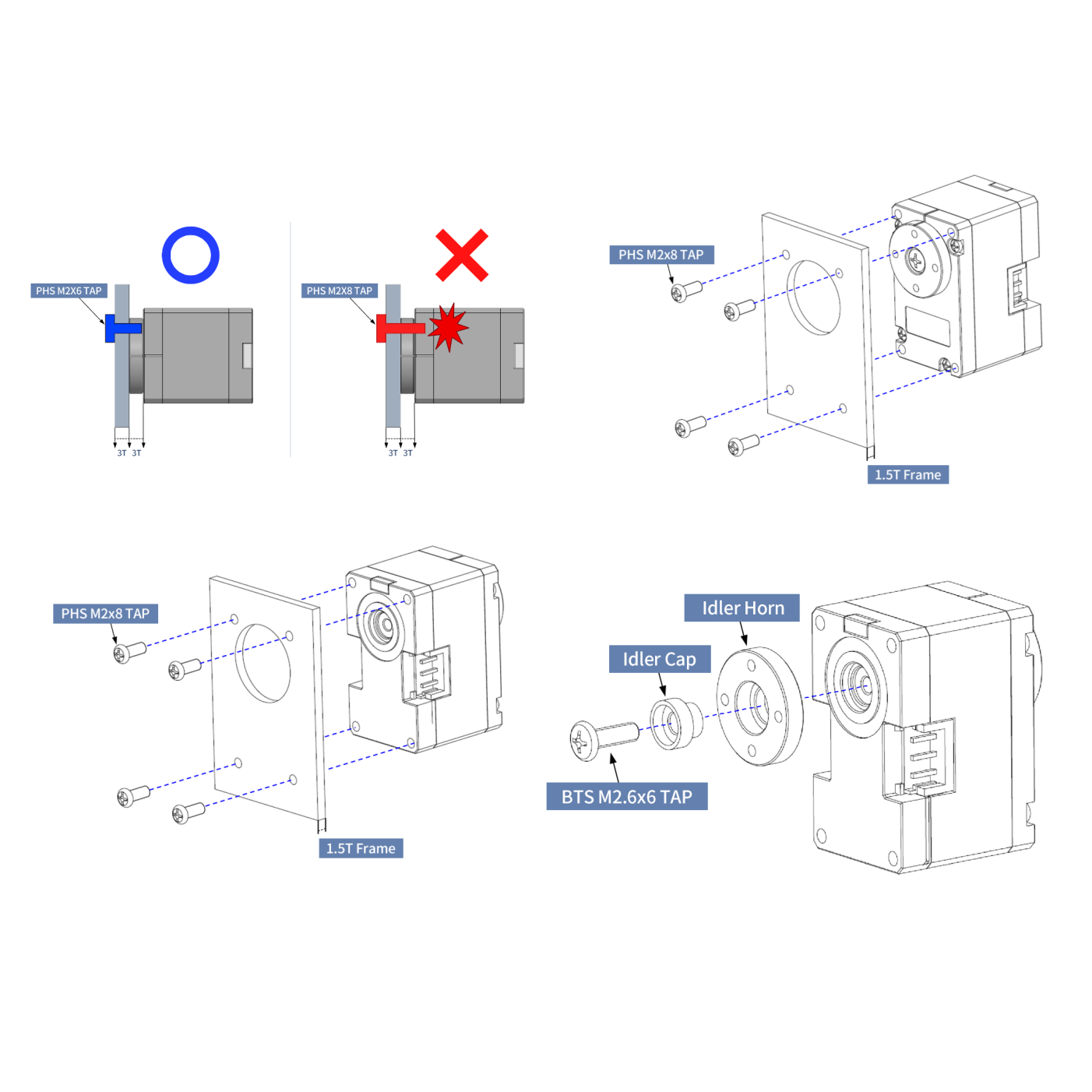
Tornillos PHS M2x6 TAP
6
Tornillos M2x8 TAP
10
Especificaciones:
Nombre del modelo
XL330-M288-T
MCU
Cortex-M0+ (64 [MHz], 32bit)
Voltaje de Entrada
Min. [V]
3.7
Recomendado [V]
5.0
Max. [V]
6.0
Características de presentación
Voltaje [V]
5.0
Torque Pico [N·m]
0.52
Corriente Pico [A]
1.5
Velocidad sin carga [rpm]
104.0
Corriente sin carga [A]
0.15
Operación Continua
Voltaje [V]
–
Torque [N·m]
–
Velocidad [rpm]
–
Corriente [A]
–
Resolución
Resolución [Grados/pulso]
0.0879
Paso [pulso/rev]
4,096
Ángulo [Grados]
360
Sensor de Posición
Codificador absoluto sin contacto (12 bits, 360 °)
Fabricante: ams (www.ams.com), número de pieza: AS5601
Temperatura de operación.
Min. [°C]
-5
Max. [°C]
60
Motor
«Cored»
Tasa de baudios
Min. [bps]
9,600
Max. [bps]
4,000,000
Algoritmo de control
PID
Tipo de engrane
Recto
Material del engrane
Ingeniería de plástico
Material del case
Ingeniería de plástico
Dimensiones (WⅹHⅹD) [mm]
20 X 34 X 26
Dimensiones (WⅹHⅹD) [inch]
0.78 X 1.33 X 1.02
Peso [g]
18.00
Peso [oz]
0.63
Relación de engranes
288.4:1
Señal de comando
Paquete digital
Tipo de protocolo
Comunicación serial asíncrona semidúplex (8 bits, 1 parada, sin paridad)
Enlace (físico)
TTL Level Multi Drop Bus
ID
0 ~ 252
Retroalimentación
Posición, Velocidad, Corriente, Marcaje en tiempo real, Trayectoria, Temperatura, Voltaje de entrada, etc
Modo de control de corriente:Giro sin fin
Modo de control de velocidad:Giro sin fin
Modo de control de posición:360 [gratos]
Modo de control de posición extendida:±256 [rev]
Modo de control de posición basado en la corriente:±256 [rev]
Modo de control PWM:Giro sin fin
Salida [W]
–
Corriente en espera [mA]
15
Productos compatibles
Controlador: Arduino MKR Shield
Interfaz: USB2Dynamixel, U2D2
Configuración predeterminada de fábrica
ID: 1
Tasa de baudios: 57600bps
(El usuario puede cambiar varias configuraciones, incluida la ID y la velocidad en baudios según el entorno)