$2,400.00 MXN (IVA Incluido)
Sin existencias
Este shield hace que sea fácil de controlar dos motores de corriente continua de alta potencia con Arduino (original o compatible). Los robustos controladores operan desde 5.5 a 24V y puede entregar una corriente de continua 12A (30A pico) por motor, o una continua 24A (60A pico) a un único motor conectado a ambos canales. Estos grandes controladores también ofrecen realimentación de corriente de sentido y aceptan frecuencias ultrasónicas PWM para un funcionamiento más silencioso.
Localización: E3
| Peso | 0.1 kg |
|---|---|
| Fabricante | Pololu |
Sin existencias
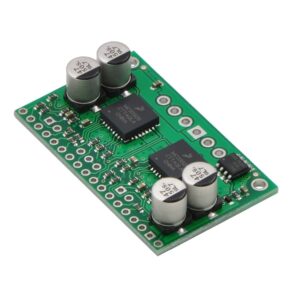
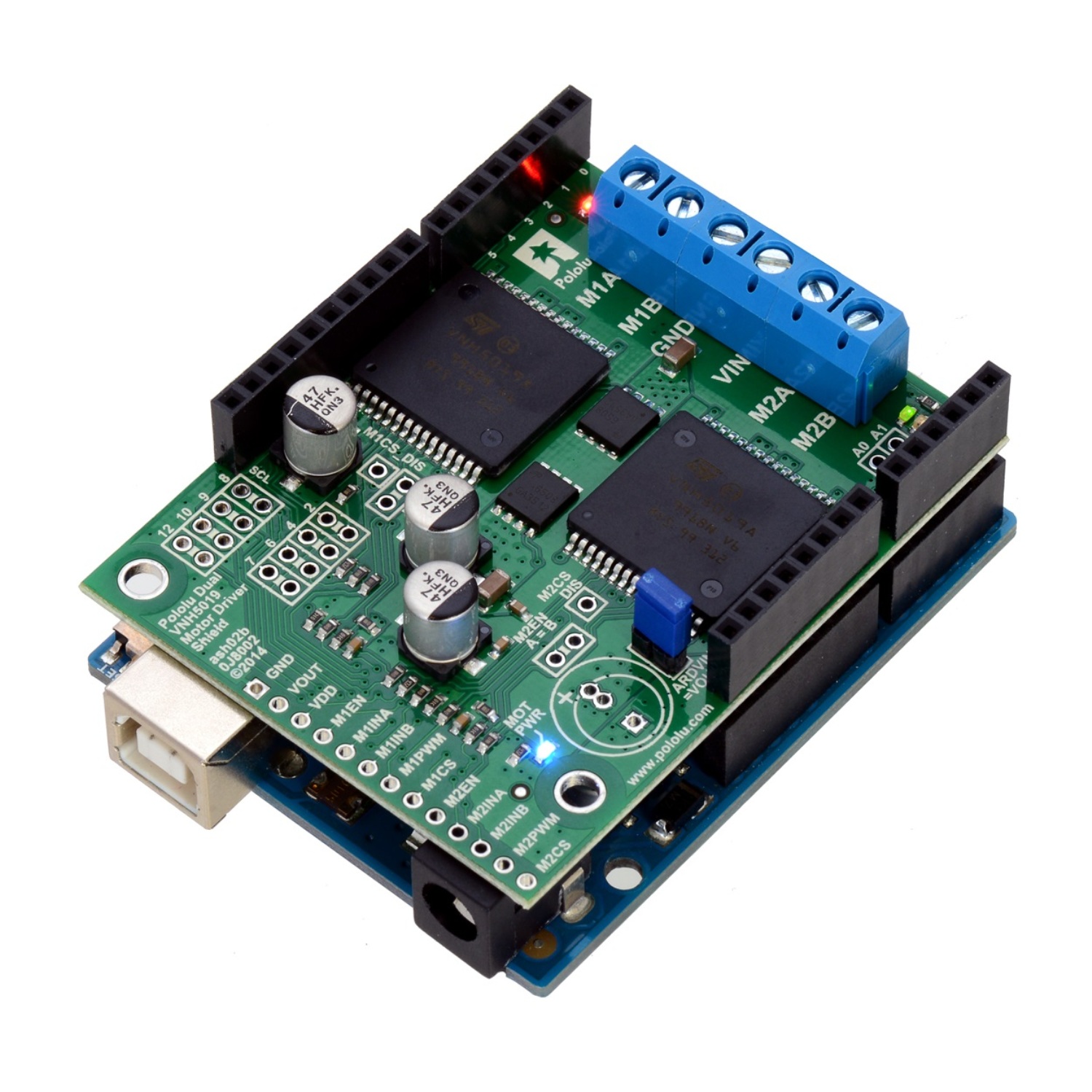
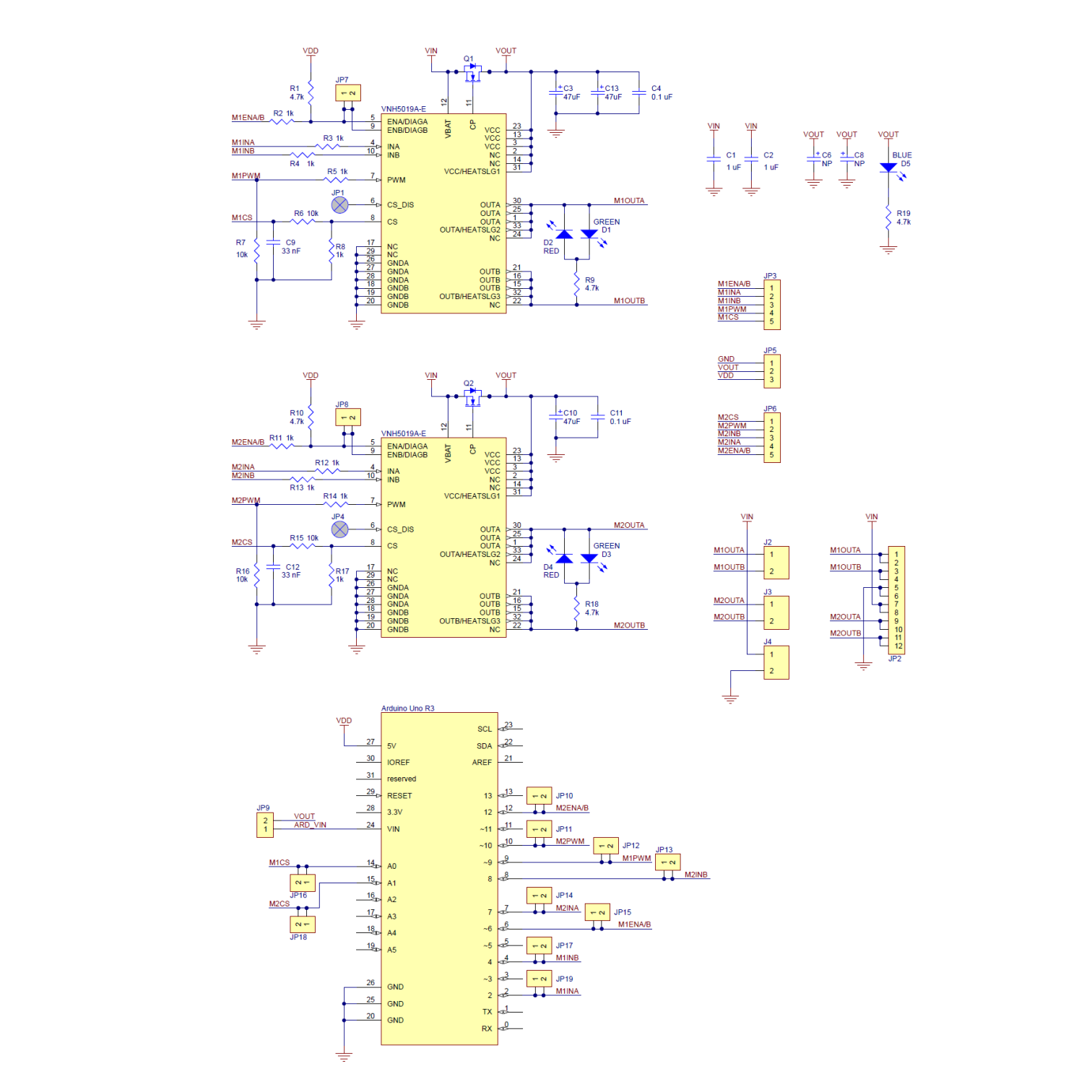
Este shield controlador de motor y su correspondiente biblioteca Arduino facilitan el control de dos motores de corriente continua bidireccionales, de alta potencia y con escobillas con una placa Arduino o compatible, como la A-Star 32U4 Prime. La placa cuenta con un par de controladores de motor VNH5019 robustos de ST, que funcionan de 5,5 a 24V y pueden proporcionar 12A continuos (30A de pico) por canal, e incorpora la mayoría de los componentes del diagrama de aplicación típico de la página 14 de la hoja de datos VNH5019 (pdf de 475k), incluidas resistencias de pull-up y de protección y FET para protección de batería inversa. Se envía completamente equipado con sus componentes SMD, incluidos los dos circuitos integrados VNH5019; se incluyen cabezales Arduino apilables y bloques de terminales para conectar motores y alimentación de motores, pero no están soldados (consulte la sección Hardware incluido a continuación).
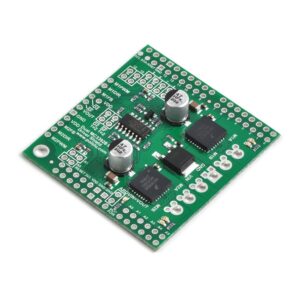
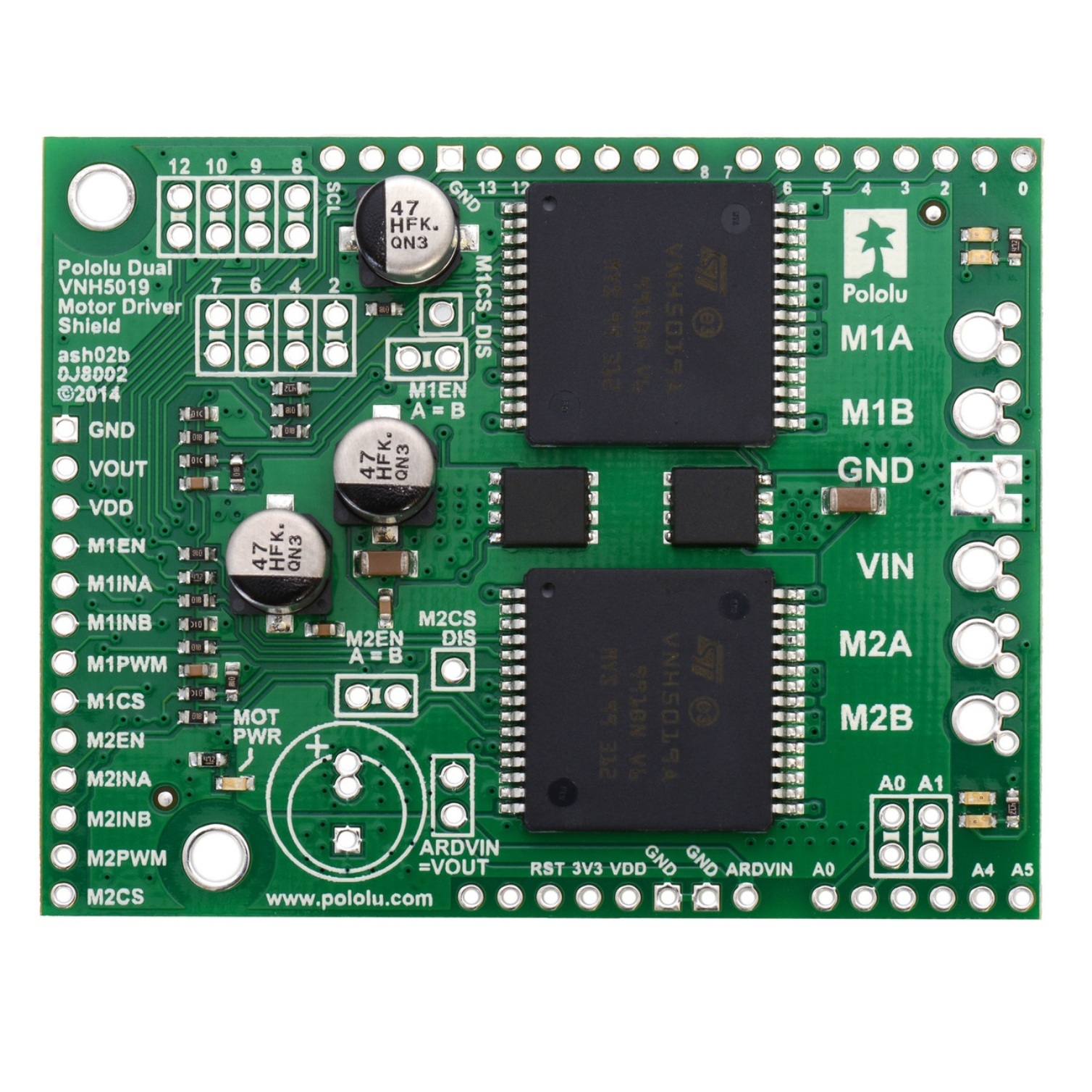
Este versátil controlador de motor está pensado para una amplia gama de usuarios, desde principiantes que solo quieren una solución de control de motor plug-and-play para sus Arduinos (y no tienen problemas con un poco de soldadura) hasta expertos que desean interactuar directamente con los excelentes circuitos integrados de controlador de motor de ST. Las asignaciones de pines de Arduino se pueden personalizar si los valores predeterminados no son convenientes, y las líneas de control VNH5019 están divididas a lo largo del lado izquierdo de la placa para uso general sin un Arduino (consulte el diagrama de conexión correcto a continuación). Esta versatilidad, junto con una opción para alimentar el Arduino directamente desde el shield, distingue a esta placa de los shields de motor similares de la competencia.
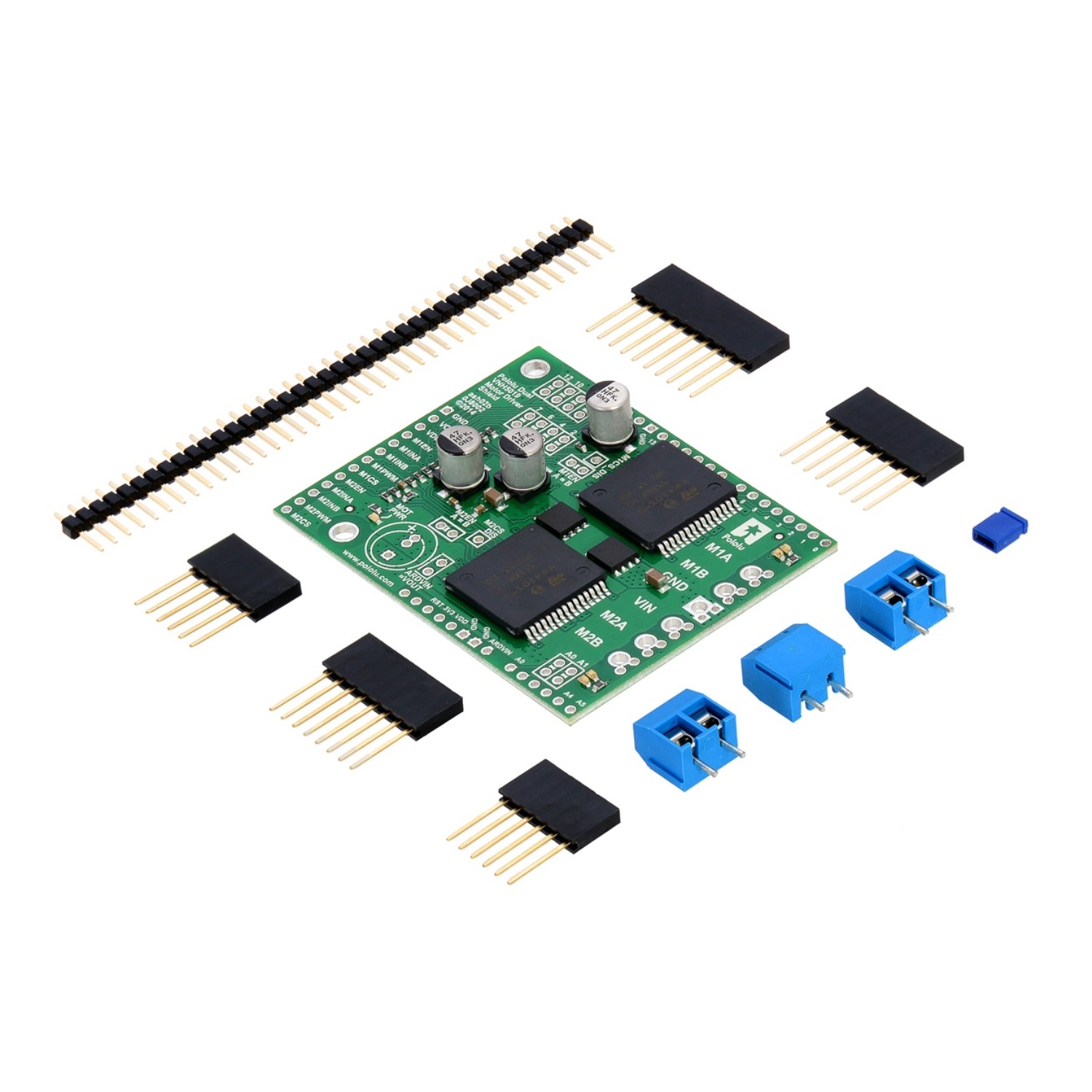
Este controlador de motor se envía con todas las piezas de montaje en superficie instaladas. Sin embargo, se requiere soldadura para ensamblar las piezas de orificio pasante incluidas. Se incluyen las siguientes piezas de orificio pasante:
También se incluye un bloque de cortocircuito de 0,1″ (para suministrar opcionalmente alimentación de la placa a Arduino).
Puede soldar los bloques de terminales a los seis orificios pasantes grandes para realizar las conexiones del motor y de la alimentación del motor, o puede cortar una sección de 12 × 1 de la tira de conectores de 0,1″ y soldarla en los orificios pasantes más pequeños que bordean estos orificios más grandes. Sin embargo, tenga en cuenta que los bloques de terminales solo tienen una capacidad nominal de 16 A, y cada par de pines del conector solo tiene una capacidad nominal de 6A combinados, por lo que para aplicaciones de mayor potencia, los cables gruesos deben soldarse directamente a la placa.
Cuando no utilice esta placa como shield de Arduino, puede soldar los conectores de 0,1″ a las conexiones lógicas a lo largo del lado izquierdo de la placa para permitir el uso con cables personalizados o placas de pruebas sin soldadura, o puede soldar cables directamente a la placa para instalaciones más compactas. Tenga en cuenta que las conexiones del motor y de la alimentación del motor no deben realizarse a través de una placa de pruebas.
El controlador del motor incluye tres condensadores electrolíticos de potencia de 47 uF y hay espacio para agregar condensadores adicionales (por ejemplo, para compensar cables de alimentación largos o aumentar la estabilidad de la fuente de alimentación). Por lo general, no se necesitan condensadores de potencia adicionales y no se incluyen condensadores adicionales con este controlador del motor.
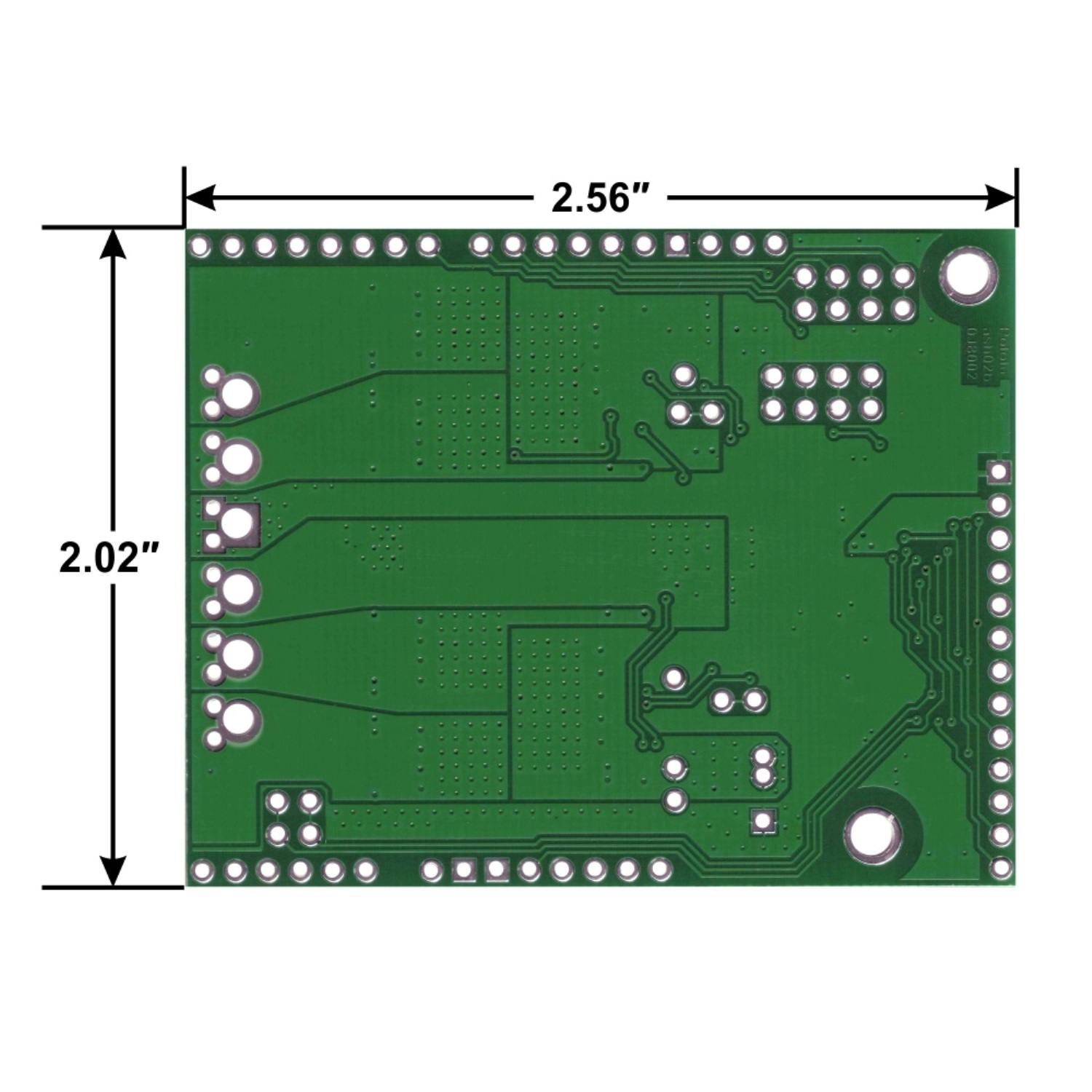
Los dos orificios de montaje están diseñados para usarse con tornillos #4 (no incluidos). Tienen una separación horizontal de 0,30″ y una separación vertical de 1,70″.
NOTA: No incluye tarjeta Arduino.
Además del shield VNH5019, ofrecemos tarjetas para controladores de motor dual más antiguos y similares de ST: el VNH3SP30 y el VNH2SP30. El VNH5019 es el único de los tres con un voltaje de funcionamiento práctico superior a 16V. El VNH5019 es el único controlador de los tres disponible en una placa Arduino de Pololu.
Los valores relacionados con la corriente en la tabla a continuación (es decir, las entradas a las que se aplica la nota al pie 3) son los resultados de pruebas en solo una o dos de cada versión del controlador, por lo que no capturan la posible variación de unidad a unidad, y se realizaron utilizando las versiones de controlador único, no las portadoras duales. Como tal, los valores deben tratarse como estimaciones aproximadas del rendimiento, no como garantías de rendimiento. Si bien estas pruebas parecen indicar que el VNH2SP30 funciona un poco más frío (y, por lo tanto, puede proporcionar más corriente continua) que el VNH5019, es importante tener en cuenta que las tres versiones del controlador se probaron en diferentes momentos y en condiciones potencialmente diferentes, por lo que los resultados no son necesariamente indicaciones precisas del rendimiento relativo.
En nuestras pruebas, notamos que la protección térmica del VNH5019 se activaba a una temperatura más baja (153 °C) que la del VNH2SP30 (170 °C), lo que podría explicar parcialmente los tiempos de sobrecalentamiento más cortos del VNH5019. Sin embargo, también observamos que el VNH5019 alcanzaba temperaturas ligeramente más altas que el VNH2SP30 cuando se usaba en las mismas condiciones: el VNH5019 alcanzó una temperatura de 85 °C después de 3 minutos a 10 A, mientras que el VNH2SP30 alcanzó una temperatura de 80 °C.
La siguiente tabla ofrece una comparación de las versiones de portadora única de los tres controladores:
| Modelo: | VNH3SP30 | VNH2SP30 | VNH5019 |
| Voltaje de operación: (1) | 5.5 – 16 V (2) | 5.5 – 16 V | 5.5 – 24 V |
| Resistencia de encendido del MOSFET (por etapa): | 34 mΩ tip. | 19 mΩ max. | 18 mΩ tip. |
| Frecuencua PWM máxima: | 10 kHz | 20 kHz | 20 kHz |
| Percepción de corriente: | n/a | 0.13 V/A tip. | 0.14 V/A tip. |
| Apagado por sobretensión: | 36 V min. (2) / 43 V tip. | 16 V min. / 19 V tip. | 24 V min. / 27 V tip. |
| Umbral alto de entrada lógica | 3.25 V min. | 3.25 V min. | 2.1 V min. |
| Tiempo de sobrecalentamiento a 20 A (3) | 8 s | 35 s | 20 s |
| Tiempo de sobrecalentamiento a 15 A (3) | 30 s | 150 s | 90 s |
| Corriente para tiempo de ejecución infinito (3) | 9 A | 14 A | 12 A |
1) El VNH3SP30 puede soportar voltajes de entrada de hasta 40 V, y el VNH2SP30 y el VNH5019 pueden soportar voltajes de entrada de hasta 41 V, pero el apagado por sobrevoltaje se activará a voltajes más bajos.
2) Si bien el apagado por sobrevoltaje del VNH3SP30 no se activa hasta 36 V, según nuestra experiencia, las corrientes de disparo hacen que la operación PWM sea poco práctica por encima de 16 V.
3) Resultados típicos utilizando las placas portadoras del controlador de motor Pololu con un ciclo de trabajo del 100 % a temperatura ambiente (sin flujo de aire forzado ni disipación de calor más allá de la PCB portadora).
Cada circuito integrado del controlador del motor tiene una corriente continua máxima nominal de 30A. Sin embargo, los chips por sí solos se sobrecalentarán con corrientes más bajas (consulte la tabla anterior para conocer los valores típicos). La corriente real que puede proporcionar dependerá de lo bien que pueda mantener fríos los controladores del motor. La placa de circuito impreso del protector está diseñada para extraer el calor de los chips del controlador del motor, pero el rendimiento se puede mejorar agregando disipadores de calor. En nuestras pruebas, pudimos proporcionar duraciones cortas (del orden de milisegundos) de 30 A y varios segundos de 20 A sin sobrecalentarse. A 6A, el chip apenas se calienta perceptiblemente al tacto. Para instalaciones de alta corriente, los cables del motor y de la fuente de alimentación también deben soldarse directamente en lugar de pasar por los bloques de terminales suministrados, que tienen una capacidad nominal de hasta 16 A.
Este producto puede calentarse lo suficiente como para provocar quemaduras mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Muchos controladores de motor o controladores de velocidad pueden tener valores nominales de corriente pico que son sustancialmente más altos que el valor nominal de corriente continua; este no es el caso de estos controladores de motor, que tienen un valor nominal continuo de 30A y protección contra sobrecorriente que puede activarse tan solo con 3 A (50A típicos). Por lo tanto, la corriente de bloqueo de su motor no debe ser más de 30A. (Incluso si espera funcionar con una corriente promedio mucho más baja, el motor aún puede consumir ráfagas cortas de corrientes altas, como cuando está arrancando, si no se toman medidas especiales).
Los voltajes en los pines M1CS y M2CS son aproximadamente iguales a 140 mV por amperio de corriente de salida para el motor correspondiente. Las lecturas de detección de corriente son más precisas con corrientes más altas.
Los pines de salida de detección de corriente están diseñados para frecuencias PWM de 5 kHz o más. Si utiliza una frecuencia PWM inferior a 5 kHz y desea medir la corriente, le recomendamos agregar un capacitor adicional entre el pin de salida de detección de corriente y GND para suavizar la señal. Por ejemplo, si utiliza una frecuencia PWM de 490 Hz y desea medir la corriente de M1, debe agregar un capacitor de 1 µF (o mayor) entre M1CS y GND.
Tenga en cuenta que, si bien los voltajes M1CS y M2CS pueden superar potencialmente los 3,3 V con corrientes altas, el circuito de detección de corriente debería ser seguro para su uso con muchas entradas analógicas de 3,3 V. La mayoría de los MCU tienen diodos de protección integrados que sujetarán el voltaje de entrada a un valor seguro y, dado que el circuito CS tiene una resistencia de 10 kΩ en serie con la salida, solo unos pocos cientos de microamperios como máximo fluirán a través de ese diodo.
Nota: La hoja de datos se refiere al CI del controlador del motor con el número de pieza completo VNH5019A-E, pero la “A” parece indicar simplemente que estaba empaquetado en tubos. Menciona VNH5019TR-E como otro número de pieza válido para este CI (lo que indica un empaquetado en cinta y carrete).
Esta versión más nueva (ash02b) de nuestro protector de controlador de motor dual VNH5019 reemplaza la versión original. La nueva versión agrega conexiones para los cuatro pines nuevos en el Arduino Uno R3. En términos generales, la mayoría de los usuarios no deberían notar ninguna otra diferencia entre las dos versiones del protector; se pueden encontrar detalles en esta sección de la guía del usuario. La forma más fácil de distinguir entre las dos versiones es a través de la serigrafía en la esquina superior izquierda, donde la nueva versión está etiquetada como ash02b y la versión original está etiquetada como ash02a.