
$1,960.00 MXN (IVA Incluido)
Sin existencias
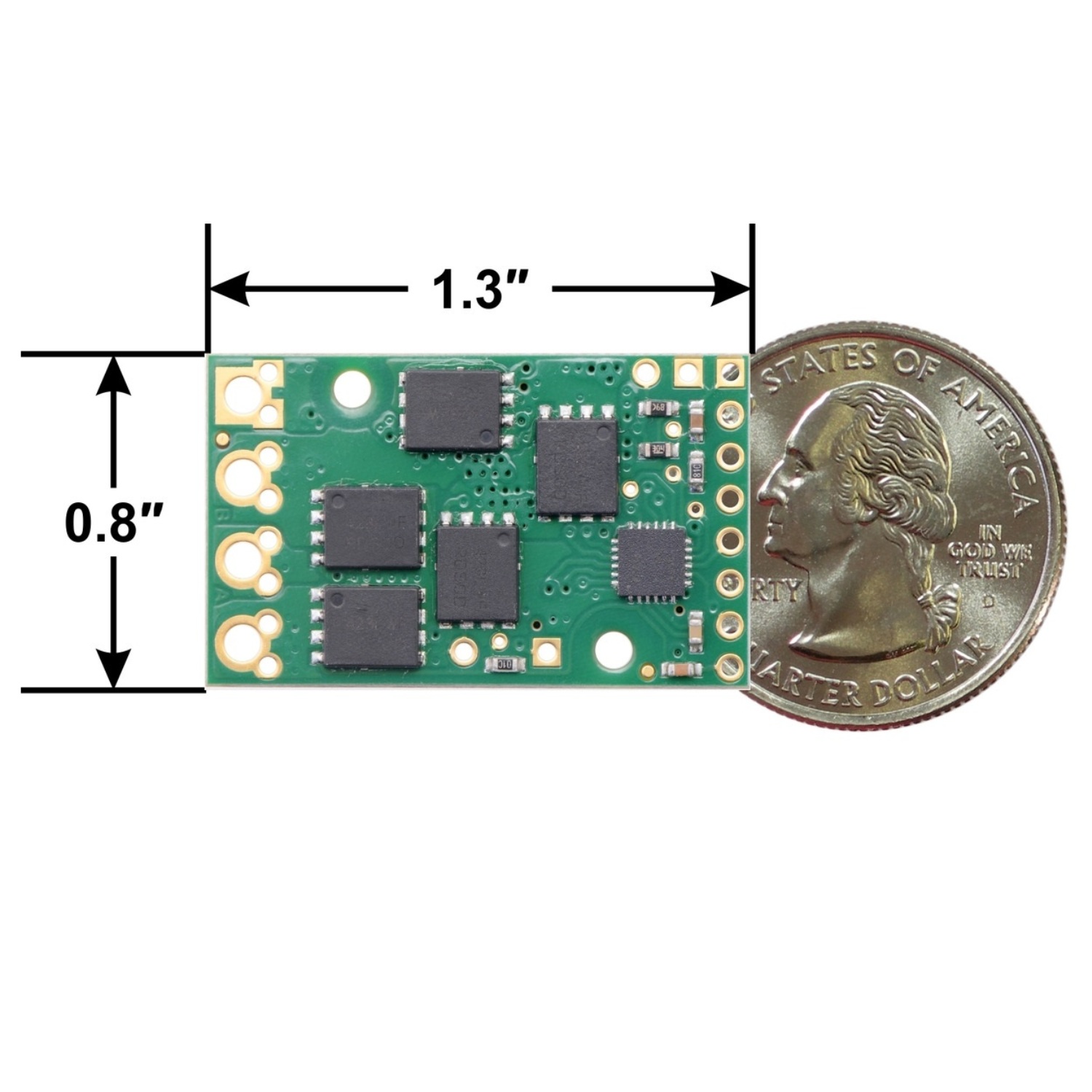
Este controlador de motor de puente H MOSFET discreto permite el control bidireccional de un motor cepillado de DC de alta potencia. La pequeña placa de 1,3″ × 0,8″ admite un amplio rango de voltaje de 6,5V a 40V y es lo suficientemente eficiente como para entregar 21A continuos sin disipador de calor. Las características adicionales de este controlador de segunda generación (G2) incluyen protección de voltaje inverso junto con detección de corriente básica y funcionalidad de limitación de corriente.
Localización: D4
| Fabricante | Pololu |
|---|---|
| Descuento | 5 o más $1,862.00 |
Sin existencias
El controlador de motor de alta potencia Pololu G2 (segunda generación) es un puente H MOSFET discreto diseñado para impulsar grandes motores de DC con escobillas. El puente H se compone de un MOSFET de canal N por pata; el resto de la placa contiene los circuitos para recibir entradas del usuario y controlar los MOSFET. El voltaje máximo absoluto para este controlador de motor es de 40V, y los voltajes más altos pueden destruir permanentemente el controlador de motor. En condiciones normales de funcionamiento, el voltaje de ondulación en la línea de suministro puede elevar el voltaje máximo por encima del voltaje promedio o previsto, por lo que un voltaje máximo seguro es de aproximadamente 34V.
Nota: Los voltajes de la batería pueden ser mucho más altos que los voltajes nominales cuando están cargadas, por lo que el voltaje nominal máximo de la batería que recomendamos es de 28V, a menos que se tomen las medidas adecuadas para limitar el voltaje máximo.
La versatilidad de este controlador lo hace adecuado para una amplia gama de corrientes y voltajes: puede entregar hasta 21 A de corriente continua con un tamaño de placa de solo 1,3″ × 0,8″ y no requiere disipador de calor. El módulo ofrece una interfaz simple que requiere tan solo dos líneas de E/S y al mismo tiempo permite su elección de operación de magnitud de signo o antifase bloqueada. Una salida de detección de corriente proporciona un indicador de la corriente del motor y el controlador puede limitar la corriente del motor a un umbral configurable. Las entradas de la fuente de alimentación cuentan con protección de voltaje inverso, mientras que la detección integrada de varias condiciones de falla ayuda a proteger contra otras causas comunes de fallas catastróficas; sin embargo, tenga en cuenta que la placa no incluye protección contra sobretemperatura.
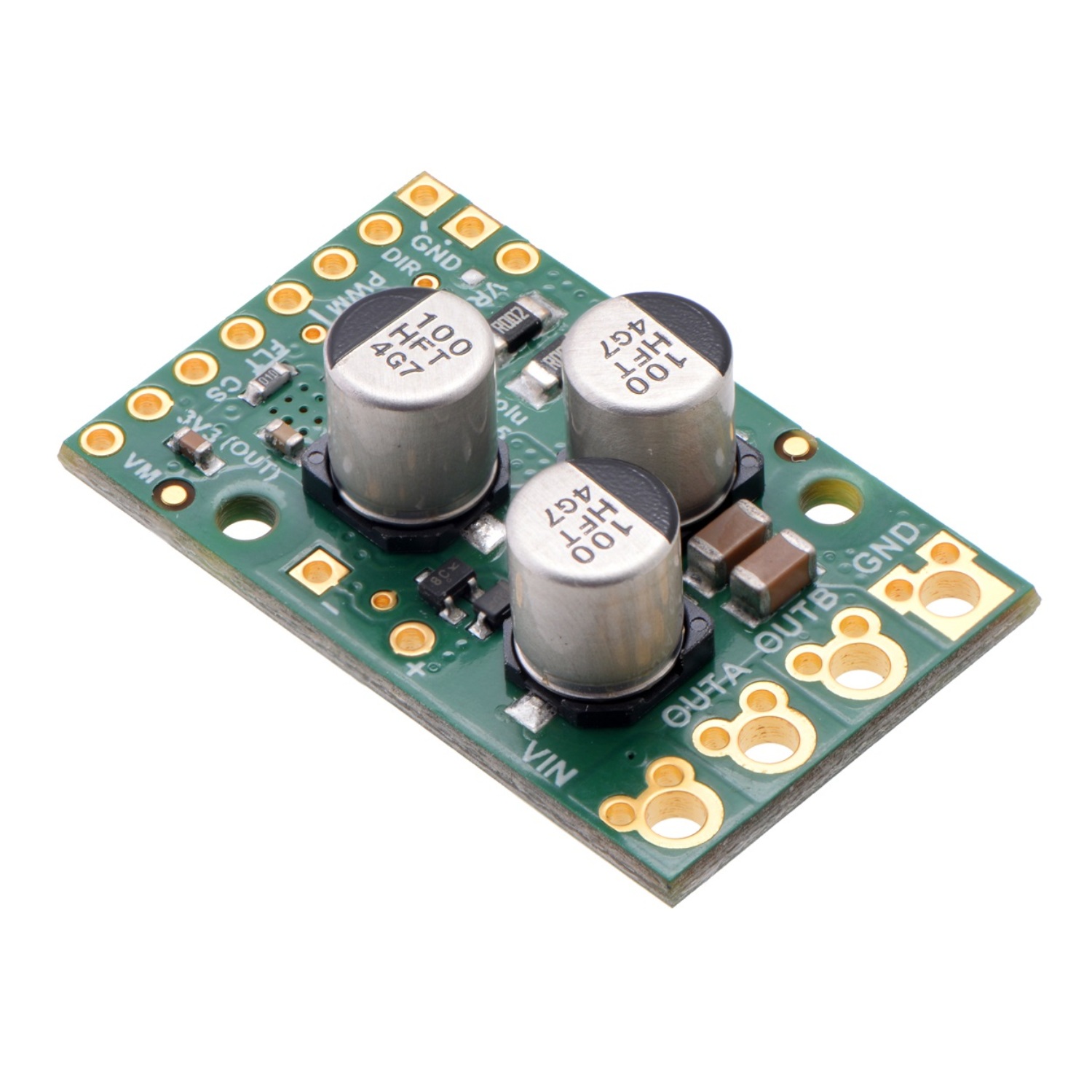
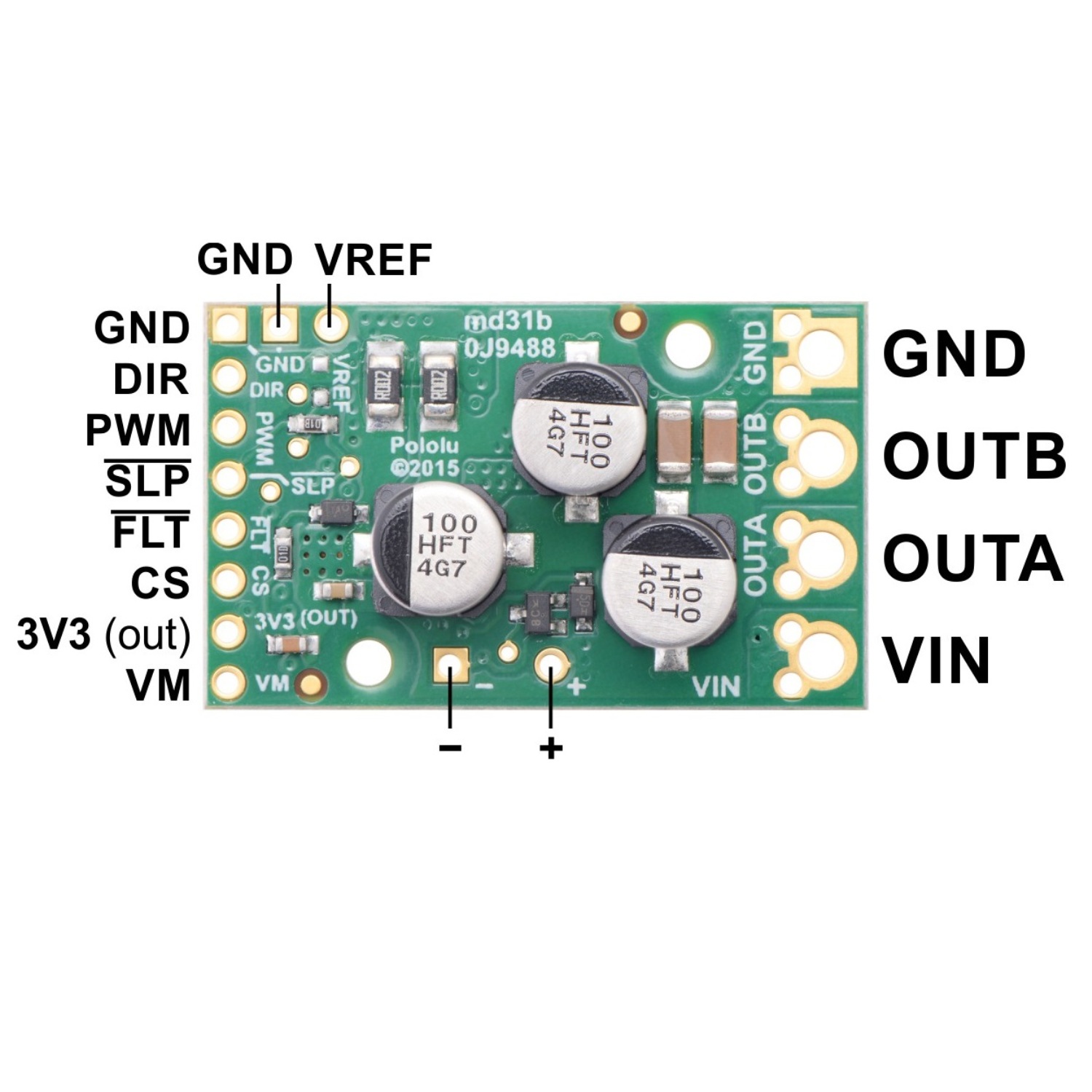
Las conexiones del motor y de alimentación del motor están en un lado de la placa, y las conexiones de control (lógica de 1,8V a 5V) están en el otro lado. El suministro del motor debe ser capaz de suministrar alta corriente. Hay dos opciones para realizar las conexiones de alta potencia (VIN, OUTA, OUTB, GND): orificios grandes con una separación de 5 mm, que son compatibles con los bloques de terminales incluidos, y pares de orificios con una separación de 0,1″ que se pueden usar con Perfboards, protoboards y conectores de 0.1″.
Para un buen desempeño, es muy importante instalar un capacitor grande entre el suministro del motor y la conexión a tierra cerca del controlador del motor. Por lo general, recomendamos usar un capacitor de al menos unos pocos cientos de μF y con una clasificación muy por encima del voltaje de suministro máximo; la capacitancia requerida será mayor si la fuente de alimentación es deficiente o está lejos (más de un pie) del controlador, y también dependerá de otros factores como las características del motor y la frecuencia PWM aplicada. Se puede instalar un condensador de orificio pasante directamente en la placa en los orificios etiquetados como ‘+’ y ‘−’ (conectados a VM y GND, respectivamente). El controlador incluye tres condensadores integrados de 100 µF, que pueden ser suficientes para pruebas breves y un funcionamiento limitado de baja potencia, pero se recomienda enfáticamente agregar un condensador más grande para la mayoría de las aplicaciones.
Advertencia: Tome las precauciones de seguridad adecuadas cuando utilice dispositivos electrónicos de alta potencia. ¡Asegúrese de saber lo que está haciendo cuando utiliza altos voltajes o corrientes! Durante el funcionamiento normal, este producto puede calentarse lo suficiente como para quemarle. Tenga cuidado al manipular este producto u otros componentes conectados a él.
Las conexiones lógicas están diseñadas para interactuar con sistemas de 1,8V a 5V (5,5 V máx.). En una configuración típica, solo se requieren PWM y DIR.
| PIN | Estado por defecto | Descripción |
|---|---|---|
| VIN | Esta es la conexión principal de la fuente de alimentación del motor de 6,5V a 40V (máx. absoluto). | |
| VM | Este pin le da acceso a la fuente de alimentación del motor después de la protección contra voltaje inverso. Puede usarse para suministrar energía con protección inversa a otros componentes del sistema, pero no debe usarse para corrientes altas. Este pin solo debe usarse como salida. | |
| +, − | Estos pads están destinados a un condensador de fuente de alimentación (están conectados a VM y GND, respectivamente). | |
| 3V3 (out) | Esta salida regulada de 3,3 V proporciona unos pocos miliamperios, que pueden ser útiles como referencia o para alimentar pequeños circuitos externos. Esta salida no debe conectarse a otras líneas de alimentación externa. Se desactiva cuando el controlador está en modo de suspensión. ¡Tenga cuidado de no cortocircuitar accidentalmente este pin con el pin VM vecino mientras se suministra energía, ya que al hacerlo destruirá instantáneamente la placa! | |
| GND | Conexión a tierra para la lógica y las fuentes de alimentación del motor. | |
| OUTA | Pin A de salida del motor (se conecta a una terminal de un motor de DC). | |
| OUTB | Pin B de salida del motor (se conecta a la otra terminal de un motor de DC). | |
| PWM | LOW | Entrada de modulación de ancho de pulso: una señal PWM en este pin corresponde a una salida PWM en las salidas del motor. |
| DIR | LOW | Entrada de dirección: cuando DIR es alto, la corriente fluirá de OUTA a OUTB; cuando es bajo, la corriente fluirá de OUTB a OUTA |
| SLP | HIGH | Entrada de suspensión invertida: la placa del controlador eleva este pin, lo que habilita el controlador de forma predeterminada; conducir SLP bajo para poner el controlador del motor en un modo de suspensión de baja potencia. |
| FLT | Indicador de falla: esta salida de drenaje abierto se reduce cuando ocurre una falla. Consulte a continuación para obtener más información. Para usar esta salida, debe subir este pin externamente al voltaje lógico de su sistema. | |
| CS | Salida de detección de corriente: este pin emite un voltaje proporcional a la corriente del motor cuando el puente H está funcionando (pero no mientras está frenando, incluso cuando la limitación de corriente está activa). El voltaje de salida es de aproximadamente 20 mV/A más un desplazamiento de 50 mV. | |
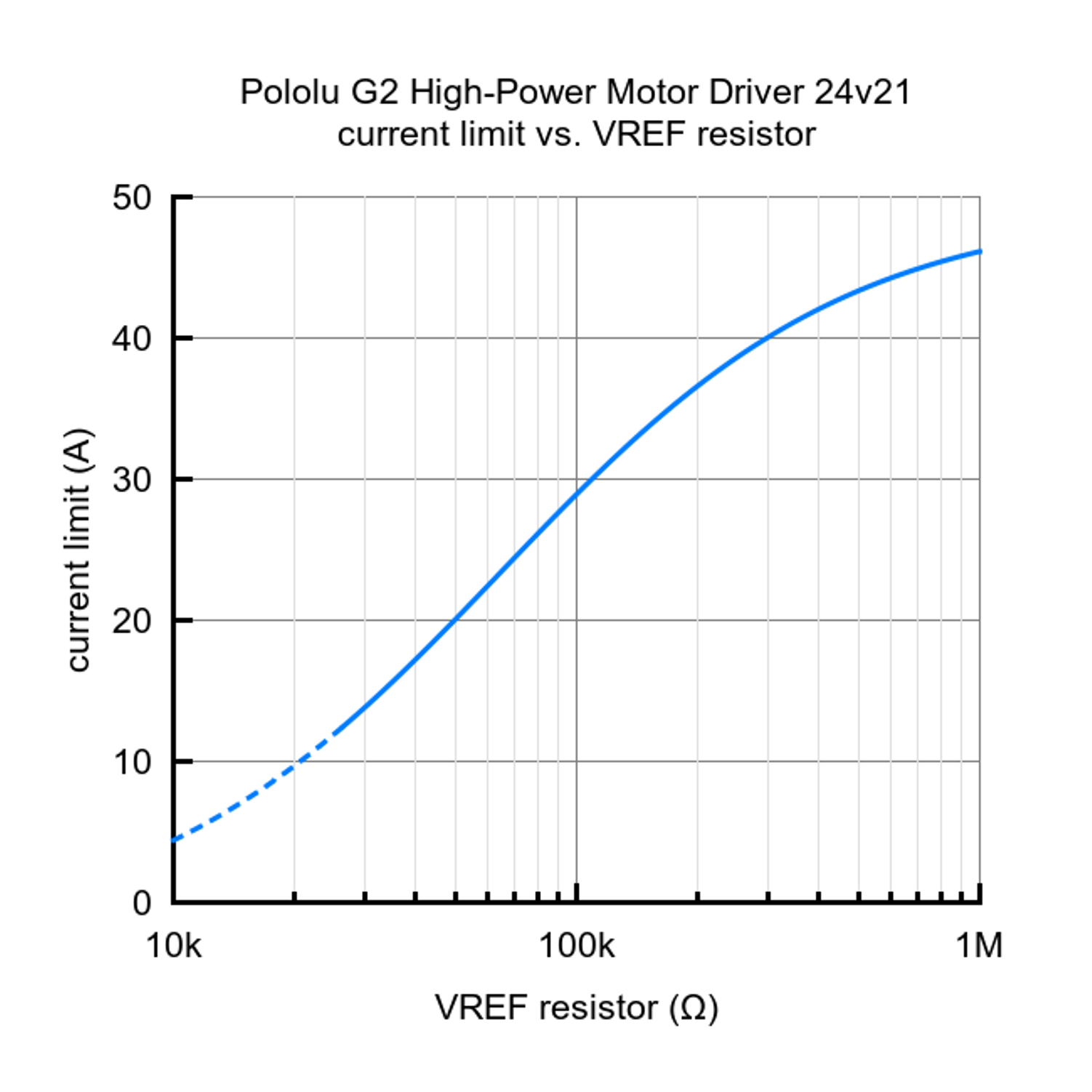
| VREF | Entrada de voltaje de referencia: se puede conectar una resistencia adicional entre este pin y GND para reducir el umbral de limitación de corriente (corte). Sin una resistencia adicional, el límite de corriente predeterminado es de aproximadamente 50 A. Consulte los detalles a continuación. |
Con el pin PWM mantenido bajo, ambas salidas del motor se mantendrán bajas (una operación de freno). Con PWM alto, las salidas del motor se controlarán de acuerdo con la entrada DIR. Esto permite dos modos de operación: magnitud de signo, en el que el ciclo de trabajo PWM controla la velocidad del motor y DIR controla la dirección, y antifase bloqueado, en el que se aplica una señal modulada por ancho de pulso al pin DIR con PWM en alto.
En la operación en antifase bloqueada, un ciclo de trabajo bajo impulsa el motor en una dirección y un ciclo de trabajo alto impulsa el motor en la otra dirección; un ciclo de trabajo del 50% apaga el motor. Una implementación exitosa de antifase bloqueada depende de que la inductancia del motor y la frecuencia de conmutación suavicen la corriente (por ejemplo, haciendo que la corriente sea cero en el caso del ciclo de trabajo del 50 %), por lo que es posible que se requiera una frecuencia PWM alta.
| Motor Driver Truth Table | ||||
|---|---|---|---|---|
| PWM | DIR | OUTA | OUTB | Operation |
| H | H | H | L | Forward |
| H | L | L | H | Reverse |
| L | X | L | L | Brake |
El controlador de motor admite frecuencias PWM de hasta 100 kHz, pero tenga en cuenta que las pérdidas de conmutación en el controlador serán proporcionales a la frecuencia PWM. Por lo general, alrededor de 20 kHz es una buena opción para la operación de magnitud de señal, ya que es lo suficientemente alta como para ser ultrasónica, lo que da como resultado una operación más silenciosa.
Un pulso en el pin PWM debe ser alto durante una duración mínima de aproximadamente 0,5 µs antes de que las salidas se enciendan durante la duración correspondiente (cualquier pulso de entrada más corto no produce un cambio en las salidas), por lo que los ciclos de trabajo bajos no están disponibles a altas frecuencias. . Por ejemplo, a 100 kHz, el período del pulso es de 10 µs y el ciclo de trabajo mínimo distinto de cero que se puede lograr es 0,5/10, o 5%.
El pin de detección de corriente del controlador, CS, emite un voltaje proporcional a la corriente del motor mientras el puente H está funcionando. El voltaje de salida es de unos 20 mV/A más una pequeña compensación, que suele ser de unos 50 mV.
La salida CS solo está activa mientras el puente H está en modo de control; está inactivo (bajo) cuando el controlador está en modo de freno (decaimiento lento), lo que sucede cuando la entrada PWM es baja o cuando la limitación de corriente está activa. La corriente continuará circulando a través del motor cuando el controlador comience a frenar, pero el voltaje en el pin CS no reflejará con precisión la corriente del motor en el modo de frenado. El controlador del motor usa internamente el voltaje CS, por lo que para evitar interferir con el funcionamiento del controlador, no debe agregar un capacitor a este pin ni conectar una carga que extraiga más de unos pocos mA de él.
El controlador G2 tiene la capacidad de limitar la corriente del motor a través del corte de corriente: una vez que la corriente del controlador del motor alcanza un umbral establecido, el controlador entra en modo de freno (caída lenta) durante aproximadamente 25 µs antes de aplicar energía para impulsar el motor nuevamente. Esto hace que sea más práctico usar el controlador con un motor que puede consumir solo unos pocos amperios mientras está en funcionamiento, pero puede consumir muchas veces esa cantidad (decenas de amperios) al arrancar.
El umbral de limitación de corriente se establece nominalmente en unos 50 A de forma predeterminada. Puede reducir el límite conectando una resistencia adicional entre el pin VREF y el pin GND adyacente; el siguiente gráfico muestra cómo el límite de corriente se relaciona con el valor de la resistencia VREF. Por ejemplo, agregar una resistencia de 100 kΩ entre VREF y GND reduce el límite de corriente a aproximadamente 29 A. Tenga en cuenta que el umbral de limitación de corriente no es muy preciso (hemos visto que algunas unidades limitan la corriente a unos 40 A cuando el umbral es configurado al valor predeterminado de la placa de 50 A), y es menos preciso en configuraciones especialmente bajas (indicadas por la parte punteada de la curva).
El controlador del motor puede detectar varios estados de falla que informa al conducir el pin FLT a nivel bajo; esta es una salida de drenaje abierto que debe elevarse al voltaje lógico de su sistema. Las fallas detectables incluyen cortocircuitos en las salidas, bajo voltaje y sobrecalentamiento. Todas las fallas desactivan las salidas del motor pero no están bloqueadas, lo que significa que el controlador intentará reanudar la operación cuando se elimine la condición de falla (o después de una demora de unos pocos milisegundos en el caso de una falla de cortocircuito). El fallo de sobrecalentamiento proporciona una indicación débil de que la placa está demasiado caliente, pero no indica directamente la temperatura de los MOSFET, que suelen ser los primeros componentes en sobrecalentarse, por lo que no debe contar con este fallo para evitar daños por sobrecalentamiento. -condiciones de temperatura.
Los MOSFET pueden manejar grandes picos de corriente durante períodos breves (por ejemplo, 100 A durante unos pocos milisegundos), y el corte de corriente del controlador mantendrá la corriente promedio por debajo del límite establecido. Las clasificaciones máximas son para transitorios rápidos (por ejemplo, cuando un motor se enciende por primera vez), y la clasificación continua de 21 A depende de varias condiciones, como la temperatura ambiente. PWMing el motor introducirá calentamiento adicional proporcional a la frecuencia. La corriente real que puede entregar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del controlador está diseñada para extraer el calor de los MOSFET, pero el rendimiento se puede mejorar agregando un disipador de calor.
Advertencia: Este controlador de motor no tiene apagado por sobretemperatura. Una condición de sobrecalentamiento o sobrecorriente puede causar daños permanentes al controlador del motor. Puede considerar usar la salida de detección de corriente integrada del controlador o un sensor de corriente externo para monitorear su consumo de corriente.
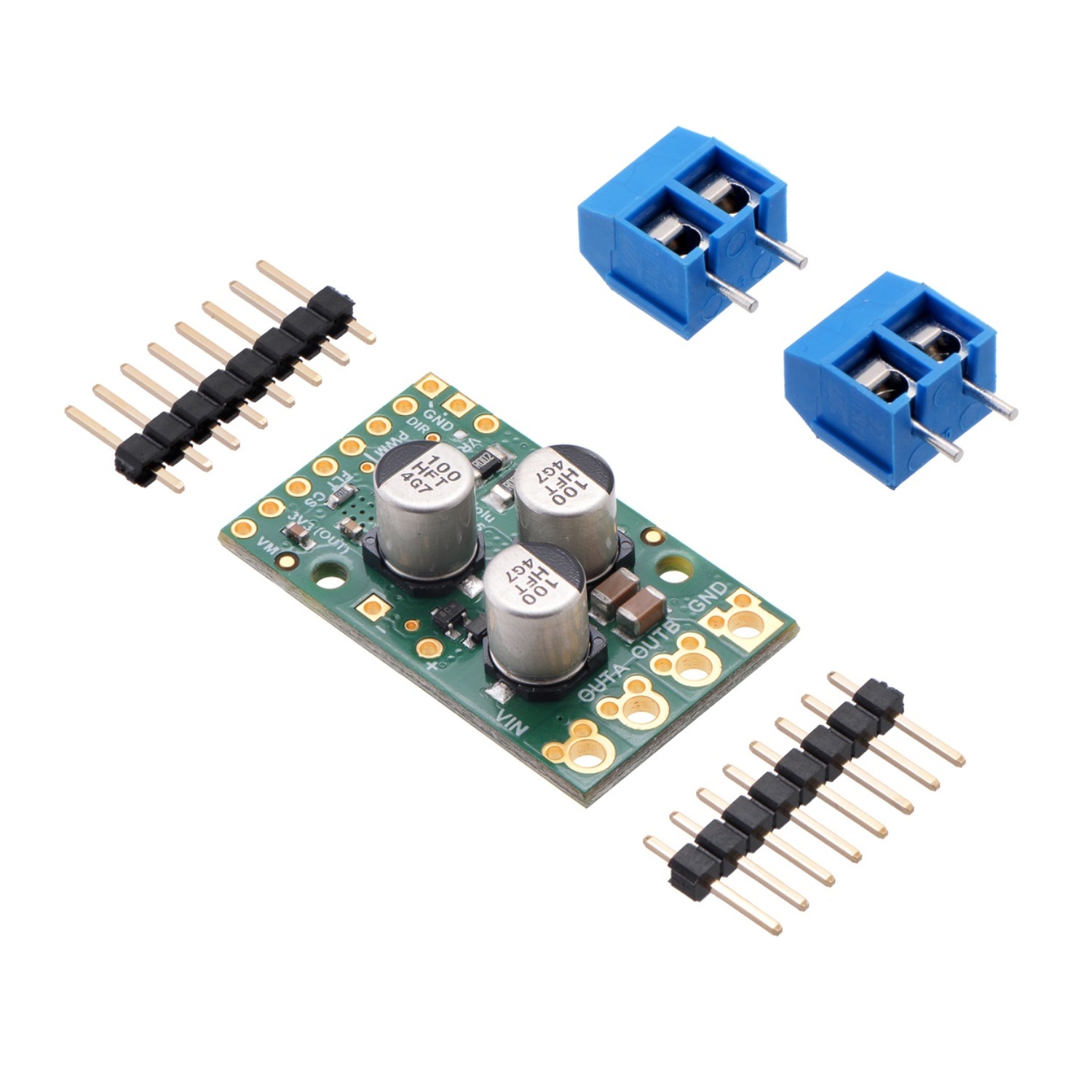
Con cada controlador de motor se incluyen dos conectores macho separables rectos de 8 pines y dos bloques de terminales de 5 mm de 2 pines. Puede soldar los bloques de terminales a los cuatro orificios pasantes grandes para hacer las conexiones de alimentación del motor y del motor, o puede soldar una de las tiras de conectores de 1×8 en los orificios pasantes más pequeños que bordean estos orificios más grandes. Tenga en cuenta, sin embargo, que los bloques de terminales solo están clasificados para 16A, y cada par de pines de cabecera solo está clasificado para 6A combinados, por lo que para aplicaciones de mayor potencia, los cables gruesos deben soldarse directamente a la placa.
La otra tira de cabecera de 1×8 se puede soldar en los orificios pequeños en el lado de la conexión lógica de la placa para permitir el uso con placas de pruebas sin soldadura, placas perforadas o conectores de 0,1″, o puede soldar cables directamente a estos orificios para una instalación más compacta .
Nota: En la mayoría de las aplicaciones, es necesario conectar un condensador grande adicional (no incluido) a través de la fuente de alimentación, como se describe en «Conexiones» más arriba.
La placa tiene dos orificios de montaje de 0,086″ (2,18 mm) de diámetro para tornillos n.º 2 o M2 (no incluidos); están separados por 0,62″ (15,75 mm) tanto horizontal como verticalmente.






$2,180.00 MXN (IVA Incluido)