Chasis de Aleación de Aluminio — Robot Inteligente MSPM0
$3,800.00 MXN (IVA Incluido)
4 disponibles
Código De Producto: YB0732
El ROS Robot es un chasis de aleación de aluminio en color verde y negro, elegante y duradero. Equipado con 4 motores con encoder modelo 520, proporciona una fuerte potencia para el vehículo, mientras que las cuatro ruedas se accionan de forma independiente, esto hace que logre un movimiento omnidireccional de 360°. La suspensión pendular puede hacer que las cuatro ruedas toquen el suelo al mismo tiempo. Está diseñado con orificios de columna de cobre atornillados con un espacio razonable para instalar diferentes componentes como tarjeta de control principal, sensor LIDAR, cámara, pantalla de visualización, brazo robótico y otra clase de equipos, según las necesidades del usuario.
El kit de chasis de aleación de aluminio de Yahboom es una plataforma de desarrollo móvil de alto rendimiento, especialmente diseñada para robots inteligentes, coches de carreras, formación educativa y proyectos de creación. Incorpora un chasis ligero de aleación de aluminio y ofrece una tracción de cuatro ruedas. Este kit no solo incluye motores y neumáticos, sino también la placa de control principal MSPM0, la placa de expansión MSPM0, la placa de controlador de motor de 4 canales, la batería y el cargador (opcional). Un conjunto completo de sistemas de control y accionamiento de motores que permite a los desarrolladores construir rápidamente una plataforma móvil robótica estable y flexible, acortando considerablemente el ciclo de desarrollo.
Características
Material de aleación de aluminio, ligero, con mejor resistencia al impacto, excelente capacidad de carga, ideal para movimientos de alta velocidad o situaciones de carga.
Múltiples juegos de orificios de montaje, compatible con motores de DC, motores con encoder y diversos sensores (como ultrasónicos, infrarrojos, módulos visuales MPU6050/K210, etc.), lo que facilita el desarrollo a gran escala.
Compatible con neumáticos convencionales (neumáticos de goma de 65 mm, ruedas universales de 1 pulgada) y motores (motores metálicos tipo L 520), lo que proporciona un movimiento más estable y un menor nivel de ruido.
Equipado con placa de control MSPM0, placa de expansión de robot, placa de controlador de motor, etc., permite iniciar el desarrollo rápidamente y acortar el ciclo del proyecto.
Adecuado para diversos escenarios, como robots educativos, coches de carreras, competiciones de creadores y desarrollo de juguetes inteligentes.
Especificaciones generales:
Motor: Tipo «L» con encoder, modelo 520
Ruedas: Llantas de alta fricción de 65mm de diámetro
Fuente de suministro: Batería de litio a 12V, 4400mAh
Encoder: Tipo Hall de 11 lineas de faseAB
Velocidad sin carga: 1.2m/s
Carga máxima (rotación): 4Kg
Carga máxima (linea recta): ~10Kg
Ángulo de inclinación con 1kg de carga: 30°
Material del chasis: Aleación de aluminio
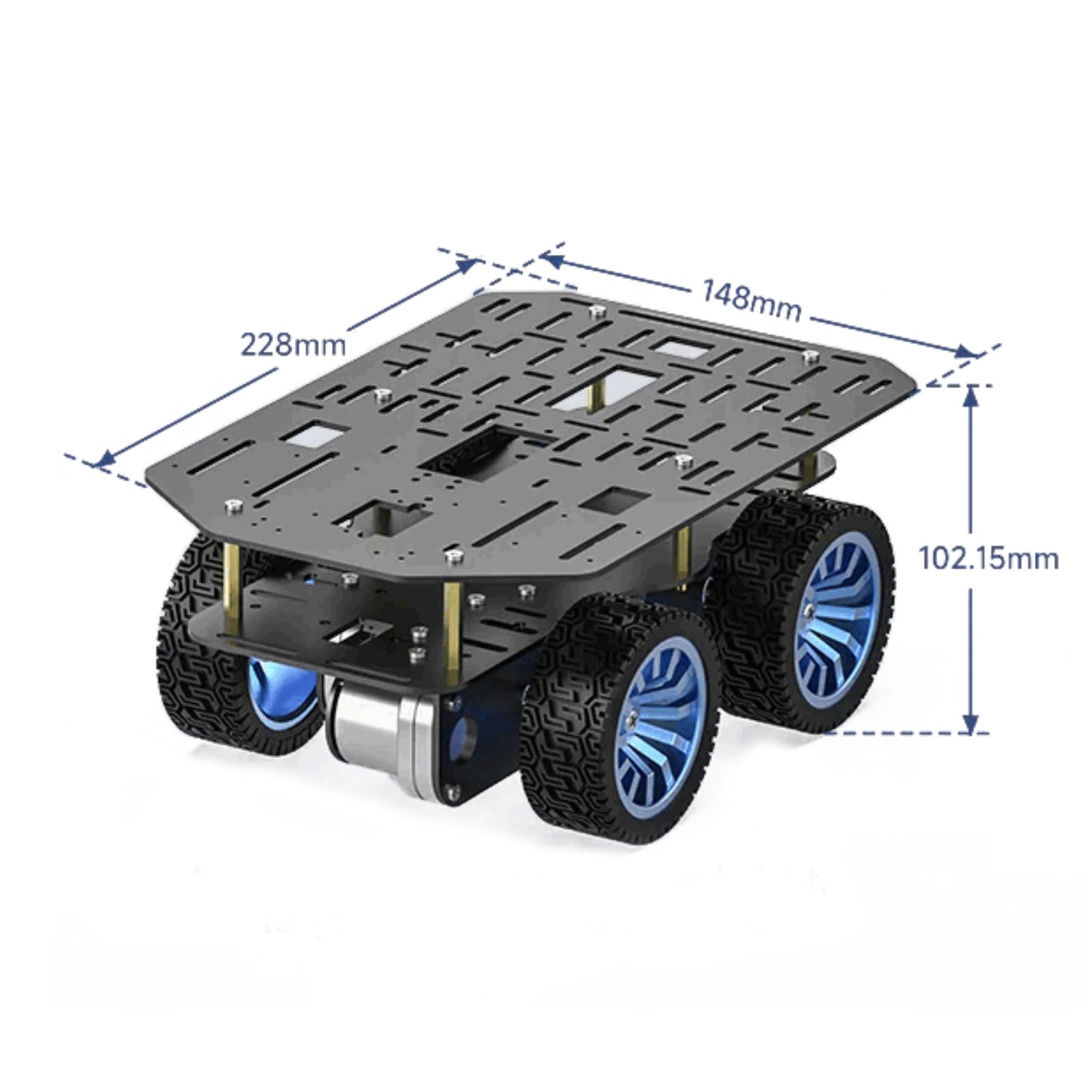
Dimensiones: 228x148x102.15
Peso: 1663g
Motor:
Modelo: Tipo «L» modelo 520 con encoder
Voltaje nominal: 12VDC
Eje de salida: 6mm de diámetro tipo «D», ele excéntrico
Torque de bloqueo: 10kg-cm
Torque nominal: 4.4kg-cm
Corriente de bloqueo: 4A
Corriente nominal: 0.5A
Velocidad de giro: 300RPM
Relación de engranes: 40:1
Potencia nominal: 6W
Tipo de encoder: Hall de incremento de fase AB
Voltaje de suministro del encoder: 3.3~5V.
Número de lineas del anillo magnético: 11 lineas
Interfaz: JST PH de 2mm de separación, 6 pines.
Peso: 160g
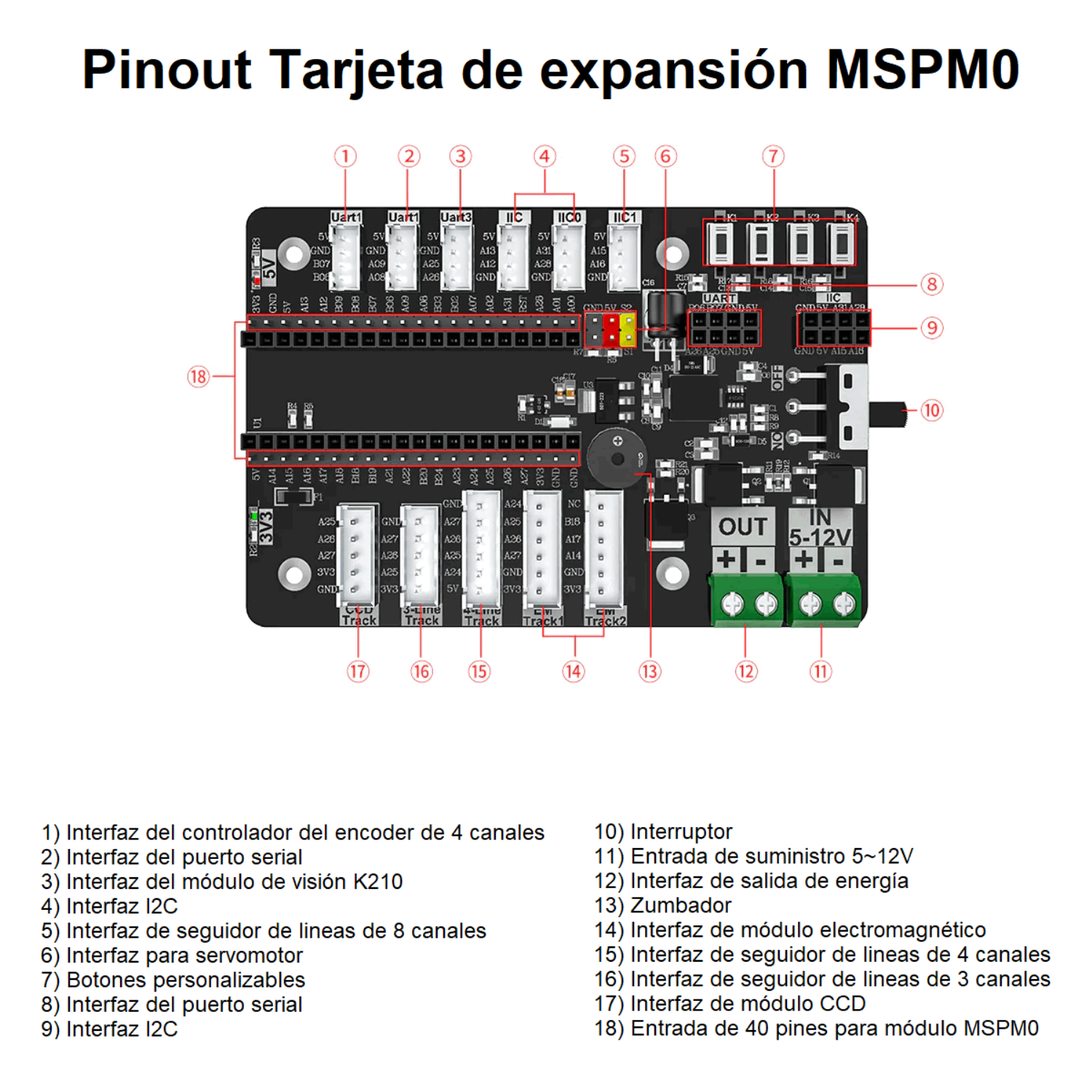
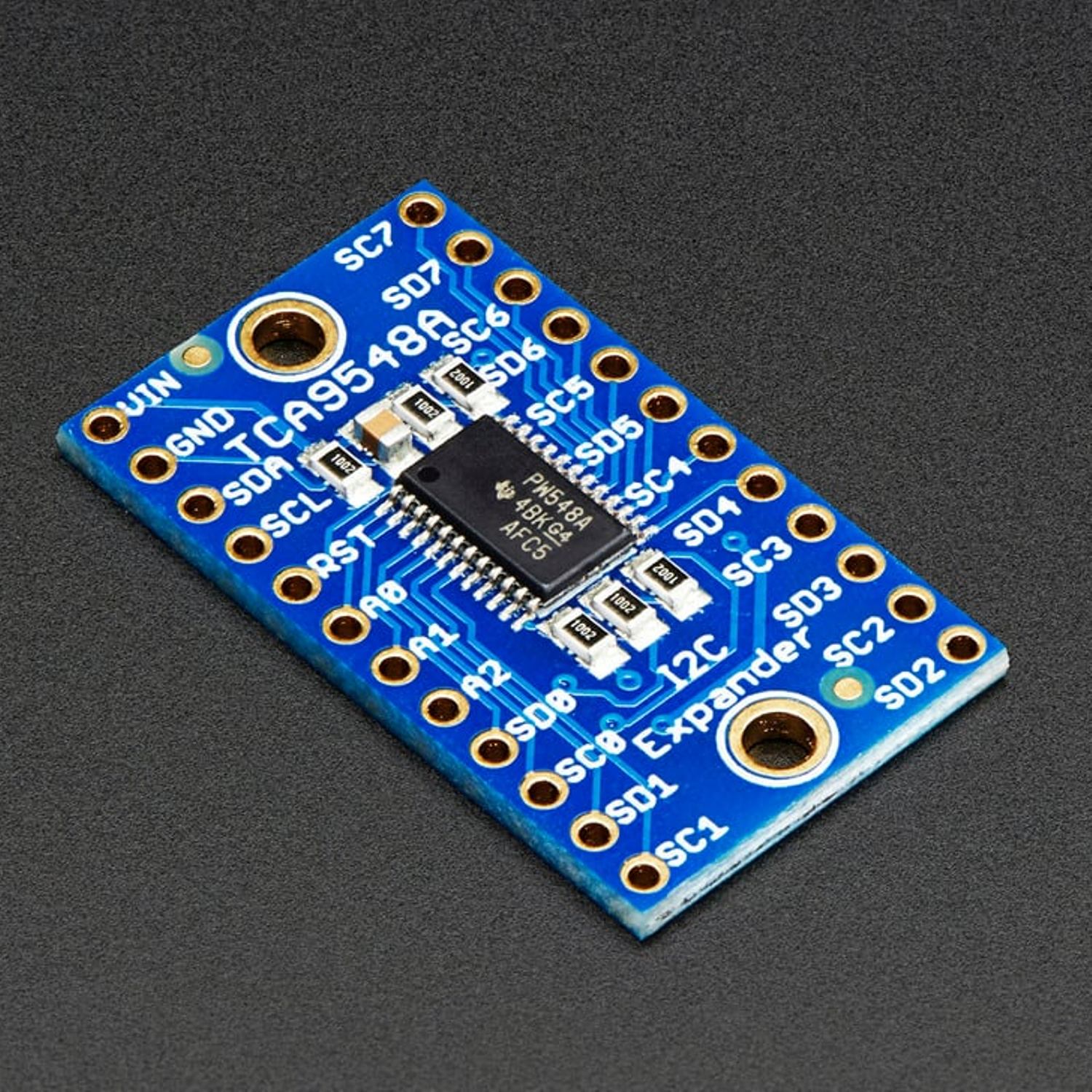
Control Maestro MSPM0:
Núcleo: Cortex M0
Número de pines: 48
Recursos de interfaz:
2 x SPI
4 x USART
2 x I2C
1 x CAN
32 x I/O
1 x DAC
Contador timer: 7
Interfaz análoga a digital: 2 x ADC (12-bit/17-canales)
SRAM: 32k
FLASH Interno: 128k
FLASH externo: 4M
Paquete de pines: LQFP48
Herramienta de compilación: KEIL MDK. CCS, etc.
Rango de voltaje (ADC):
Voltaje Externo: 1.62~3.6V
Voltaje núcleo: 2.5V
Frecuencia: 80MHz
Consumo de energía:
Modo en suspensión: 2.76mA
Modo en espera: 1.5uA
Consumo durante operación: 8mA/80M
Descarga de programa: descarga por SWD o por puerto serial
LED: Indicador de energía rojo, luces LED personalizadas
Botones: Botón de reinicio, botón personalizado
Interfaz:
Depuración SWD
Tipo «C»
Display LCD
Dimensiones: 19x52mm
Peso: 8g
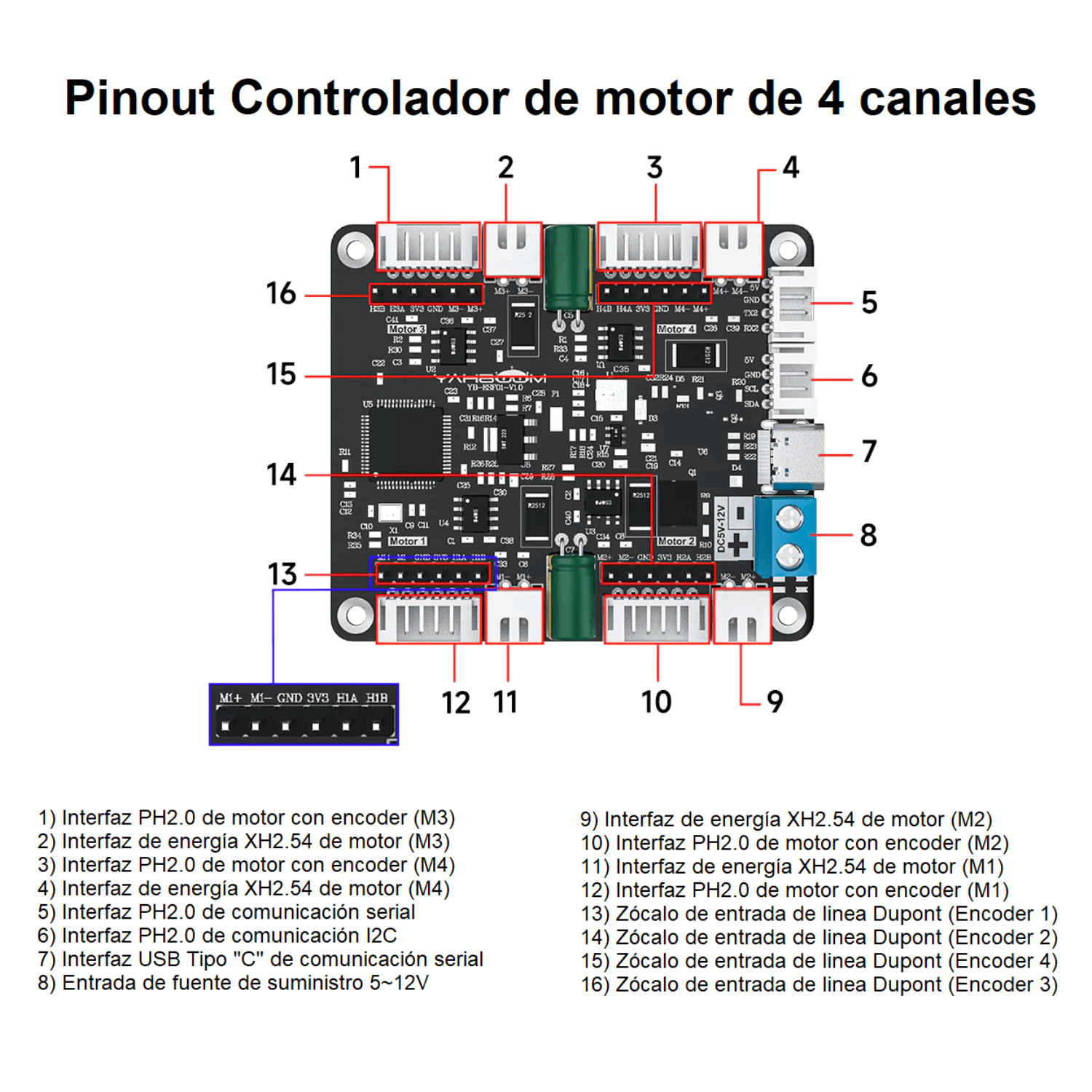
Controlador de motor con encoder de 4 canales:
Interfaz del encoder:
M*+: Energía de suministro del motor (+)
M*-: Energía de suministro del motor (-)
GND: Tierra de la fuente de suministro del encoder
3V3: Positivo de la fuente de suministro del encoder
HA: Señal Hall del motor «A»
HB: Señal Hall del motor «B»
Interfaz del motor DC:
M+: Energía de suministro del motor (+)
M-: Energía de suministro del motor (-)
Interfaz USART:
5V: Positivo del puerto serial
GND: Tierra del puerto serial
TX2: Línea de transmisión
RX2: Línea de recepción
Interfaz I2C:
5V: Positivo del puerto I2C
GND: Tierra del puerto I2C
SCL: Línea del reloj
SDA: Línea de datos bidireccional
Interfaz de entrada de energía 5~12V
+ : Positivo de la fuente de alimentación
– : Tierra de la fuente de alimentación
Nota: El valor de «M*» depende del motor conectado (M1, M2, M3 o M4).
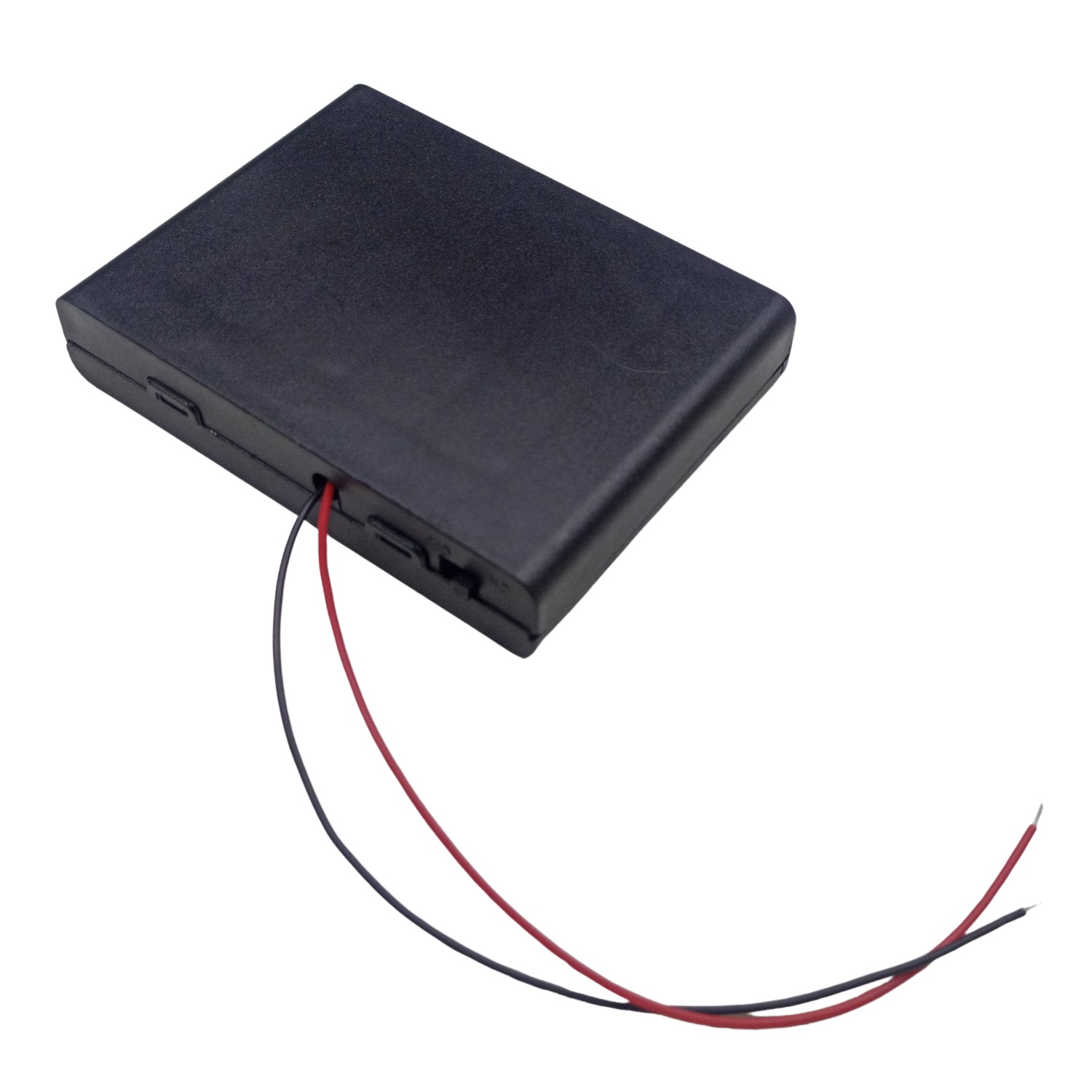
Batería:
Voltaje nominal: 11.1V
Voltaje máximo: 12.6V
Corriente nominal: 4400mAh
Corriente de descarga: 1.3C (6A)
Tipo de celda: 18650.
Configuración: 3 en serie por 2 en paralelo
Peso: alrededor de 300g
Longitud de cable:
Carga: 15cm
Descarga: 30cm
Voltaje de corte de descarga: 8.1V
Corriente de carga nominal: 0.2C
Corriente de carga máxima: 1C
Protección incluida:
Sobre carga
Sobre corriente
Sobre descarga
Corto circuito
Incluye:
1 x Chasis de aleación de aluminio (Parte superior)
1 x Chasis de aleación de aluminio (Parte inferior)
1 x Cinta velcro
1 x Destornillador
1 x Llave inglesa
1 x Tarjeta de desarrollo MSPM0
1 x Tarjeta de expansión para MSPM0
1 x Controlador de motor con encoder de 4 canales
4 x Motorreductor con encoder Tipo «L» 520
4 x Bracket para motorreductor Tipo «L» 520
4 x Coples para motorreductor
4 x Llantas de alta fricción de 65mm de diámetro
1 x Batería de 12V y 4400mAh
1 x Cargador 12V 2A
1 x Conjunto de cables (USB tipo «C», JST PH de 2mm, etc)
1 x Hardware adicional (Tornillos, tuercas, postes, etc)